



杨净 丰色 发自 凹非寺
量子位 | 公众号 QbitAI
波士顿动力Atlas,又来整活炸场了!
不是跑酷不是跳舞,而是去工地老实上班当助手,结果把人类给整不会了。
当高架上工人需要工具包,Atlas二话不说完成搭桥、爬楼等一系列动作后,一记漂亮的飞身旋转,走你~

完成任务之后,它也是不走寻常路,直接从架子上跳下来,来一个体操式前空翻精准落地。
(咳咳,有体操爱好者表示,这应该是团身前空翻转体180度)
啊这,正常人谁会这么落地呀……

△工人be like
这个整活视频一播出,就受到大量的关注,13个小时已有近百万人观看,获得4.7万点赞。
不少网友惊叹于其动作的流畅性。

不过也有网友却感觉有点恐怖和害怕:
我已经脑补被这种机器人追杀的情景了。

Atlas真的越来越像人了
但撇开那些“炫技”,Atlas举手投足间已经越来越有“人味”了。
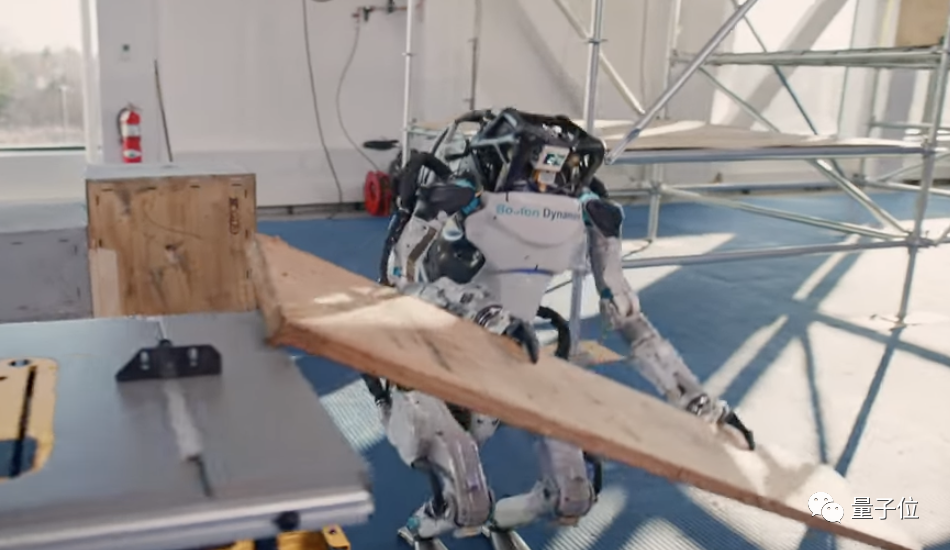
在扔工具包之前,Atlas有模有样地环顾了一遍四周,才走向前捡起地上的小木板:
用它给自己搭个桥:
接着又俯身下蹲,抓起地上的工具包:
尽管它的手只是个“小夹子”,但不管是前面的木板还是现在的包,它都能稳稳地拿在手里。
然后就是拎着工具包上楼梯、过搭桥、蹦上高台,全都一气呵成,没有一步动作是多余的:

尤其是蹦高台时,看起来好自如,上去之后也没有发生后仰的情况。
只是中途这个蹦蹦跳跳的小步伐(还有开头举着木板时那个转身跳),让人忍不住惊呼:
你们机器人干活也太有激情了吧!我们人类可不行(手动狗头)

全程最精彩的表现无疑就是扔工具包的时候。

有网友就表示,这飞身转投的动作简直像是CG生成的一样。
但波士顿动力毕竟不是特效公司,对吧?
投完工具包后,Atlas选择从另一边下去。于是还有这样的一个场景:
Atlas需要保证自己推完箱子后还能保持身子平衡,不前倾摔倒(工程师表示箱子和它体重差不多)。
箱子垫好后,它就迅速跳下。仔细看,它还会伸出双手保持平衡,简直与人无异:
最后,再来欣赏一下它精彩的体操式翻转:

落地还是一如既往地稳。
如此一连串动作结束后,拿到了工具包的工人也在那头举手对Atlas表示谢意,还夸了一句:
你小子真是秀啊(Such a show-off)。

是啊,今天给我们“秀”一脸的Atlas,是如何炼成如此高超本领?波士顿动力也一并给大家讲了讲。
当Atlas开始工作
如果说,之前波士顿动力机器人的跑酷和跳舞,是在考虑「如何让机器人在环境中动态地移动」的问题。
而现在Atlas开始配合人类工作,则是在此问题基础上的进阶:机器人如何在环境中感知和操纵物体。
为了便于大家理解,波士顿动力还发布了一则幕后花絮,不仅登上了趋势榜单,还在9小时内有23万+的观看量。
要做到这一点,机器人首先就需要get一项技能:理解并考虑到物体的属性,包括它们的形状、质量,以及操纵这些物体时存在的力等。
具体实现,按照通常机器人组成划分,主要包括感知、控制和执行三个部分。
感知系统方面,据官方介绍,Atas感知周遭世界的方式,跟人类的眼球并不完全相同。
它的头部有两个摄像头,一个是彩色相机,另一个则是深度相机,用TOF飞行时间来测量距离。

依靠这两个摄像头,Atlas来寻找环境中的形状和其他特征,来识别关键物体信息。
找到了关键物体之后,就需要依照它现有的姿势等属性来思考如何将它抓取上来,这就涉及到了控制系统。
这其中,波士顿动力的工程师们提到了一项关键技术:模型预测控制,即思考未来会发生什么来进行控制。
比如,在机器人推动和自己体重差不多的箱子之前,就要仔细考虑物体的位置、移动速度,以及两者之间的力,如何不会摔倒等问题。

而在执行方面,有类似于F1赛车的液压系统,每次Atlas活动完后,还有专门的电气“医生”诊断把关。
除此之外,工程师们还造了一个虚拟世界。Atlas要在模拟环境中开发学习,再来到现实中测试。
另外,关于最后一个彩蛋“体操式翻转”,官方也分享了背后的故事。(这种动作在他们团队被称之为病态技巧。)
首先机器人收拢四肢,然后绕着一定角度来翻转。以往他们做的都是单轴翻转来实现“后空翻”,而这次翻转需要围绕多个轴来旋转,就需要多种控制器来协同。
网友:脑补机器人追杀
相比Spot,Atlas露面次数较少。在此之前大家对Atlas的印象,还停留在跑酷和跳舞。
这不今年十月,它和7只Spot一起表演了一段堪称可以赢得英国达人秀的男团舞。
那一次,网友评论波士顿动力完全可以转去当机器人编舞公司了。
而这次的“工具人”表演,有一种波士顿动力终于又想起了机器人的“正经用途”之感。(手动狗头)
不少网友对Atlas这一系列流畅的表演表示惊叹,并称进步相当大。还有人关注到了一些细节,比如保留了Atlas身上的擦伤和凹痕,“说明它确实辛勤工作了。”

以及最后那一跳,不少人类感叹:终究是比不过了。

与此同时,此番“正经”工作也再次给网友带来了不少的隐忧。
这要是不受人类控制是多么可怕。
还有人建言献策,提到了最近因ChatGPT爆火的OpenAI:两个应该联手起来,打造超级机器人。

对于这个建议,你觉得如何呢?
参考链接:
[1]https://www.youtube.com/watch?v=-e1_QhJ1EhQ&t=44s
[2]https://www.youtube.com/watch?v=XPVC4IyRTG8
[3]https://s.weibo.com/weibo?q=%E6%B3%A2%E5%A3%AB%E9%A1%BF%E5%8A%A8%E5%8A%9B
— 完 —
「人工智能」、「智能汽车」微信社群邀你加入!
欢迎关注人工智能、智能汽车的小伙伴们加入交流群,与AI从业者交流、切磋,不错过最新行业发展&技术进展。
PS. 加好友请务必备注您的姓名-公司-职位噢 ~
点这里👇关注我,记得标星哦~


















 53
53

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









