




🌟 关注「嵌入式软件客栈」公众号 🌟,解锁实战技巧!💻🚀
在并发编程的开发中,锁机制是确保数据一致性和线程安全的核心技术。无论是资源受限的单片机环境,还是功能丰富的Linux系统,锁机制都扮演着至关重要的角色。
锁机制
什么是锁机制?
锁机制是一种同步原语,用于控制多个执行单元对共享资源的访问。它确保在任意时刻只有一个执行单元能够访问被保护的资源,从而避免数据竞争和不一致状态。
锁的分类
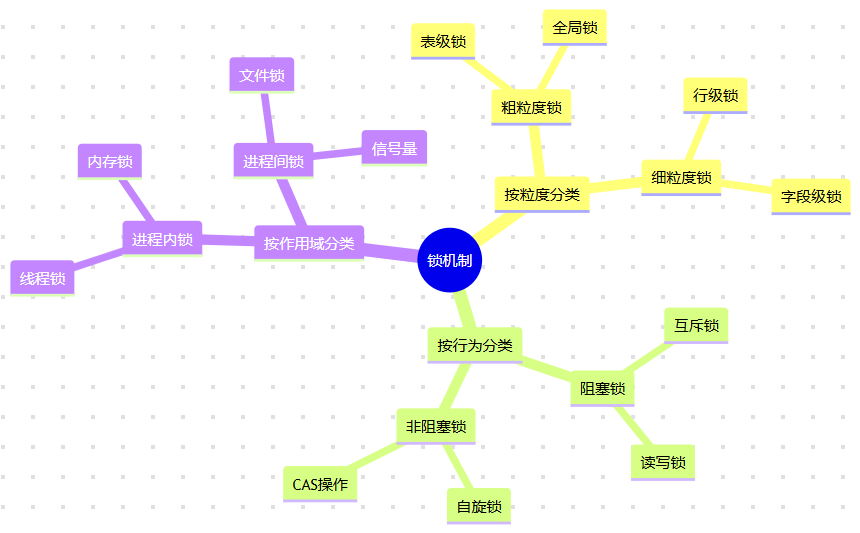
单片机下的锁机制
特点与约束
单片机环境具有以下特点:
- 资源受限:内存和CPU资源有限
- 实时性要求:需要保证响应时间
- 单核架构:通常只有一个CPU核心
- 中断驱动:需要处理硬件中断
常用锁机制
1. 关中断锁
最基本的锁机制,通过关闭中断来保证原子性:
// 关中断锁示例
typedef struct {
uint32_t saved_irq_state;
} irq_lock_t;
void irq_lock_acquire(irq_lock_t *lock) {
lock->saved_irq_state = __get_PRIMASK();
__disable_irq();
}
void irq_lock_release(irq_lock_t *lock) {
if (!lock->saved_irq_state) {
__enable_irq();
}
}
2. 原子操作锁
利用CPU的原子指令实现轻量级锁:
// 原子操作锁示例
typedef volatile uint32_t atomic_lock_t;
#define ATOMIC_LOCK_INIT 0
#define ATOMIC_LOCK_LOCKED 1
static inline int atomic_lock_try_acquire(atomic_lock_t *lock) {
return __sync_bool_compare_and_swap(lock, ATOMIC_LOCK_INIT, ATOMIC_LOCK_LOCKED);
}
static inline void atomic_lock_release(atomic_lock_t *lock) {
__sync_lock_test_and_set(lock, ATOMIC_LOCK_INIT);
}
3. FreeRTOS互斥锁
在RTOS环境下的标准互斥锁:
#include "FreeRTOS.h"
#include "semphr.h"
// FreeRTOS互斥锁示例
SemaphoreHandle_t xMutex;
void init_mutex(void) {
xMutex = xSemaphoreCreateMutex();
}
void critical_section(void) {
if (xSemaphoreTake(xMutex, pdMS_TO_TICKS(100)) == pdTRUE) {
// 临界区代码
xSemaphoreGive(xMutex);
}
}
单片机锁机制流程图
Linux下的锁机制
特点与优势
Linux环境具有以下特点:
- 多核架构:支持真正的并行执行
- 丰富的系统调用:提供多种同步原语
- 进程隔离:需要进程间通信机制
- 内存管理:虚拟内存和页面管理
常用锁机制
1. POSIX线程锁
基于pthread库的互斥锁:
#include <pthread.h>
// POSIX互斥锁示例
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
void *thread_function(void *arg) {
pthread_mutex_lock(&mutex);
// 临界区代码
pthread_mutex_unlock(&mutex);
return NULL;
}
2. 自旋锁
适用于短时间持有的锁:
#include <pthread.h>
// 自旋锁实现
typedef struct {
volatile int locked;
} spinlock_t;
void spin_lock(spinlock_t *lock) {
while (__sync_lock_test_and_set(&lock->locked, 1)) {
// 自旋等待
__asm__ volatile("pause");
}
}
void spin_unlock(spinlock_t *lock) {
__sync_lock_release(&lock->locked);
}
3. 文件锁
用于进程间同步:
#include <sys/file.h>
#include <fcntl.h>
// 文件锁示例
int acquire_file_lock(const char *filename) {
int fd = open(filename, O_RDWR | O_CREAT, 0644);
if (fd == -1) return -1;
if (flock(fd, LOCK_EX | LOCK_NB) == -1) {
close(fd);
return -1;
}
return fd;
}
void release_file_lock(int fd) {
flock(fd, LOCK_UN);
close(fd);
}
4. 信号量
用于资源计数和同步:
#include <semaphore.h>
// 信号量示例
sem_t semaphore;
void init_semaphore(void) {
sem_init(&semaphore, 0, 1); // 初始值为1的二进制信号量
}
void producer(void) {
// 生产资源
sem_post(&semaphore); // 增加信号量
}
void consumer(void) {
sem_wait(&semaphore); // 等待资源
// 消费资源
}
Linux锁机制架构图
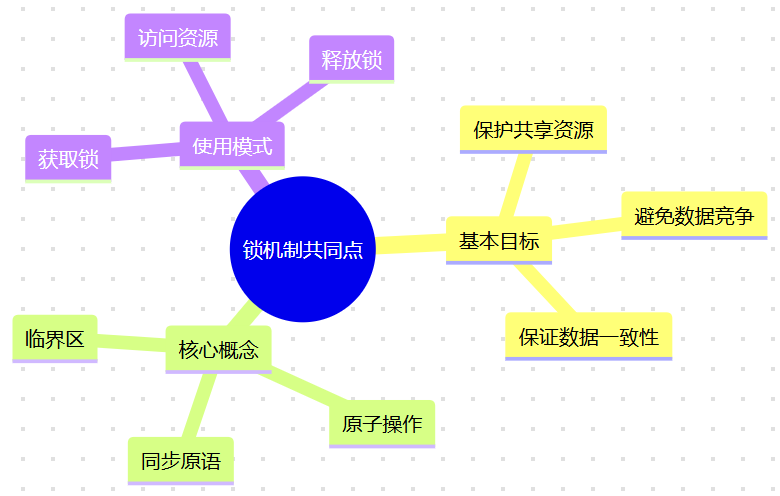
共同点与差异分析
共同点
差异对比
| 特性 | 单片机环境 | Linux环境 |
|---|---|---|
| 资源约束 | 严格受限 | 相对宽松 |
| 并发模型 | 中断驱动 | 多线程/多进程 |
| 锁粒度 | 粗粒度 | 细粒度 |
| 实现复杂度 | 简单直接 | 复杂多样 |
| 性能开销 | 最小化 | 可接受 |
| 调试难度 | 困难 | 相对容易 |
实战案例分析
共享计数器保护
问题描述
多个线程/任务需要安全地访问和修改一个共享计数器。
单片机实现
// 单片机环境下的计数器保护
typedef struct {
volatile uint32_t counter;
irq_lock_t lock;
} safe_counter_t;
void counter_increment(safe_counter_t *counter) {
irq_lock_acquire(&counter->lock);
counter->counter++;
irq_lock_release(&counter->lock);
}
uint32_t counter_get_value(safe_counter_t *counter) {
uint32_t value;
irq_lock_acquire(&counter->lock);
value = counter->counter;
irq_lock_release(&counter->lock);
return value;
}
Linux实现
// Linux环境下的计数器保护
typedef struct {
volatile uint32_t counter;
pthread_mutex_t mutex;
} safe_counter_t;
void counter_init(safe_counter_t *counter) {
counter->counter = 0;
pthread_mutex_init(&counter->mutex, NULL);
}
void counter_increment(safe_counter_t *counter) {
pthread_mutex_lock(&counter->mutex);
counter->counter++;
pthread_mutex_unlock(&counter->mutex);
}
uint32_t counter_get_value(safe_counter_t *counter) {
uint32_t value;
pthread_mutex_lock(&counter->mutex);
value = counter->counter;
pthread_mutex_unlock(&counter->mutex);
return value;
}
生产者-消费者模式
单片机实现(FreeRTOS)
#include "FreeRTOS.h"
#include "queue.h"
#define QUEUE_SIZE 10
QueueHandle_t xQueue;
void producer_task(void *pvParameters) {
int data = 0;
while (1) {
if (xQueueSend(xQueue, &data, pdMS_TO_TICKS(100)) == pdTRUE) {
data++;
}
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
void consumer_task(void *pvParameters) {
int received_data;
while (1) {
if (xQueueReceive(xQueue, &received_data, pdMS_TO_TICKS(1000)) == pdTRUE) {
// 处理数据
printf("Received: %d\n", received_data);
}
}
}
Linux实现
#include <pthread.h>
#include <semaphore.h>
#define BUFFER_SIZE 10
typedef struct {
int buffer[BUFFER_SIZE];
int in, out;
sem_t empty, full;
pthread_mutex_t mutex;
} circular_buffer_t;
void producer(circular_buffer_t *cb, int item) {
sem_wait(&cb->empty);
pthread_mutex_lock(&cb->mutex);
cb->buffer[cb->in] = item;
cb->in = (cb->in + 1) % BUFFER_SIZE;
pthread_mutex_unlock(&cb->mutex);
sem_post(&cb->full);
}
int consumer(circular_buffer_t *cb) {
int item;
sem_wait(&cb->full);
pthread_mutex_lock(&cb->mutex);
item = cb->buffer[cb->out];
cb->out = (cb->out + 1) % BUFFER_SIZE;
pthread_mutex_unlock(&cb->mutex);
sem_post(&cb->empty);
return item;
}
常见陷阱处理
优先级反转
解决方案:优先级继承
// 使用优先级继承的互斥锁
pthread_mutexattr_t attr;
pthread_mutexattr_init(&attr);
pthread_mutexattr_setprotocol(&attr, PTHREAD_PRIO_INHERIT);
pthread_mutex_init(&mutex, &attr);
ABA问题
// ABA问题示例
typedef struct node {
int value;
struct node *next;
} node_t;
// 错误的CAS操作
node_t *head = NULL;
void push(int value) {
node_t *new_node = malloc(sizeof(node_t));
new_node->value = value;
do {
new_node->next = head;
} while (!__sync_bool_compare_and_swap(&head, new_node->next, new_node));
}
// 解决方案:使用版本号或标记位
typedef struct node {
int value;
struct node *next;
uint32_t version; // 版本号
} node_t;
锁竞争
解决方案:锁分离
// 锁分离示例
typedef struct {
pthread_mutex_t read_mutex;
pthread_mutex_t write_mutex;
int reader_count;
pthread_mutex_t count_mutex;
} rw_lock_t;
void read_lock(rw_lock_t *rw) {
pthread_mutex_lock(&rw->count_mutex);
rw->reader_count++;
if (rw->reader_count == 1) {
pthread_mutex_lock(&rw->write_mutex);
}
pthread_mutex_unlock(&rw->count_mutex);
}
void write_lock(rw_lock_t *rw) {
pthread_mutex_lock(&rw->write_mutex);
}
关注 嵌入式软件客栈 公众号,获取更多内容



















 196
196

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











