




 本文详细介绍了英语中的16种时态,包括一般现在时、现在进行时、现在完成时、现在完成进行时等,并通过实例解析了各种时态的用法,帮助读者深入理解英语时态的应用。
本文详细介绍了英语中的16种时态,包括一般现在时、现在进行时、现在完成时、现在完成进行时等,并通过实例解析了各种时态的用法,帮助读者深入理解英语时态的应用。
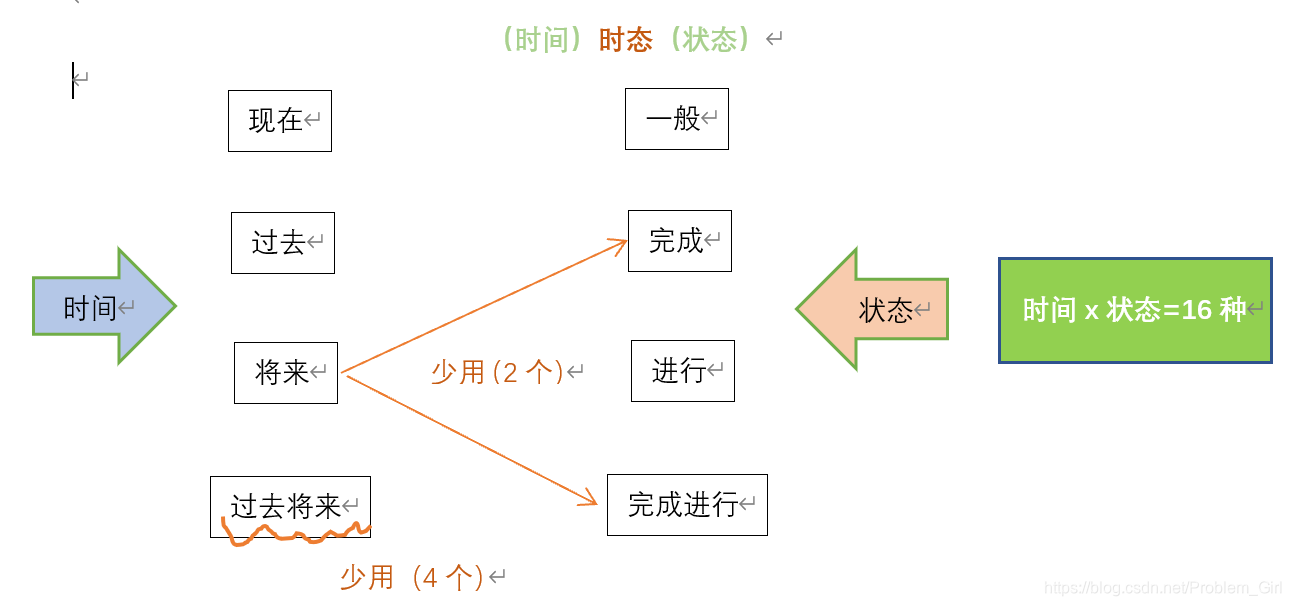
(时间)时态(状态)
一般现在时态
①表达事实。
I eat carrots. The sun rises in the east.
注:I eat a carrot. 错!你是想表达你正在吃一根胡萝卜还是想表达你每天都吃同一根胡萝卜?若是前者须用进行时,若是后者,一根胡萝卜能被你吃很多天?不合逻辑,必须用复数carrots,即每天都吃胡萝卜
②表达习惯/重复的动作。
③表示预计发生的事
The bus leaves at 8PM tonight. (公交车每晚8点开走这是母庸质疑的,规定的,也就指我们可预计发生的事情)
现在进行时态
现在正在进行的动作状态。
I am… You / We / They are… She / He / It is…
I’m eating carrots.
现在完成时态
已经完成的动作往往对现在有影响!
如我已经吃掉了胡萝卜。(暗示:没得吃了)
我们知道中文里是用“过”,“了”这些词来表示完成。如我吃过胡萝卜。
构成:助动词 have / has + 动词的过去分词
注意:过去分词≠过去式
I have eaten carrots.
我吃过胡萝卜。(言下之意:我曾吃过这种食物,我是见过世面的)
I have eaten a carrot.
我吃过一根胡萝卜。(言下之意:我已经吃了,所以不饿了。)
现在完成进行时态
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2580
2580

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









