



 OpenHarmonyMeetup2023在北京举行,汇聚了众多专家分享关键技术,如OpenHarmony生态、RISC-V应用、图形架构等,旨在提升开发者对其关注度,推动生态发展并鼓励更多开发者参与共建。
OpenHarmonyMeetup2023在北京举行,汇聚了众多专家分享关键技术,如OpenHarmony生态、RISC-V应用、图形架构等,旨在提升开发者对其关注度,推动生态发展并鼓励更多开发者参与共建。
“OpenHarmony 正当时”OpenHarmony Meetup 2023 城市巡回活动,旨在通过 meetup 线下交流形式,解读 OpenHarmony 作为下一代智能终端操作系统的新版本及成果转化,提升开发者对 OpenHarmony 的关注度,普及 OpenHarmony 开发技能,加速开发者对 OpenHarmony 的掌握,从而吸引更多企业和技术爱好者广泛参与到 OpenHarmony 生态共建中。星星之火,足以燎原!

OpenHarmony Meetup 2023 北京站
11 月 25 日,由 OpenAtom OpenHarmony(简称“OpenHarmony")项目群工作委员会主办,中国科学院软件研究所承办,江苏润开鸿数字科技有限公司、北京万里红科技有限公司、北京奥思维科技有限公司协办,北京中科微澜科技有限公司支持的 OpenHarmony Meetup 2023 城市巡回北京站活动,在中国科学院软件园区隆重举办,现场吸引了北京本地开发者、高校师生和多位软件企业家的广泛参与。

OpenHarmony Meetup 2023 北京站签到现场
本次活动由 OpenHarmony 项目群工作委员会批准,由中国科学院软件研究所工程师、开放原子校源行开源大使陈美汝作为出品人,以“OpenHarmony 正当时--共筑开源未来”为主题,携八位 OpenHarmony 社区专家从多个维度进行了议题分享,围绕万物智联操作系统的关键技术挑战、OpenHarmony 生态、上下文感知的 OpenHarmony 内核模糊测试技术、OpenHarmony 图形架构、基于 RISC-V 架构的 OpenHarmony 应用实践、面向互联和智能的交互技术变迁、基于 OpenHarmony 的移动政务生态共建、OSWare 矿鸿发行版赋能矿山工业智能化等内容,聚焦开源软件产业生态、搭建对话交流平台,探讨 OpenHarmony 生态,让更多开发者了解 OpenHarmony 技术发展和生态进展,诚邀更多开发者群体加入 OpenHarmony 社区。

OpenHarmony 项目管理委员会 (PMC)主席任革林致辞
OpenHarmony 项目管理委员会 (PMC)主席任革林首先为活动致辞。他表示:“OpenHarmony 成功的核心是生态体系的构建,Meetup 活动就是 OpenHarmony 社区与开发者面对面进行技术交流的舞台,我们愿倾听来自开发者的声音,不断完善和优化 OpenHarmony 技术底座,推动 OpenHarmony 生态的蓬勃发展。”
OpenHarmony 项目群技术指导委员会委员贾宁致辞
OpenHarmony 项目群技术指导委员会委员贾宁在《 万物智联操作系统的关键技术挑战》演讲中提到:“万物智联时代,操作系统面临新的挑战,例如如何满足多种形态设备的需求,如何在保障安全隐私的同时实现智能化。解决技术挑战、实现竞争力领先,是成为新生态基座的关键。”

开放原子开源基金会教培与行业研究部部长朱其罡致辞
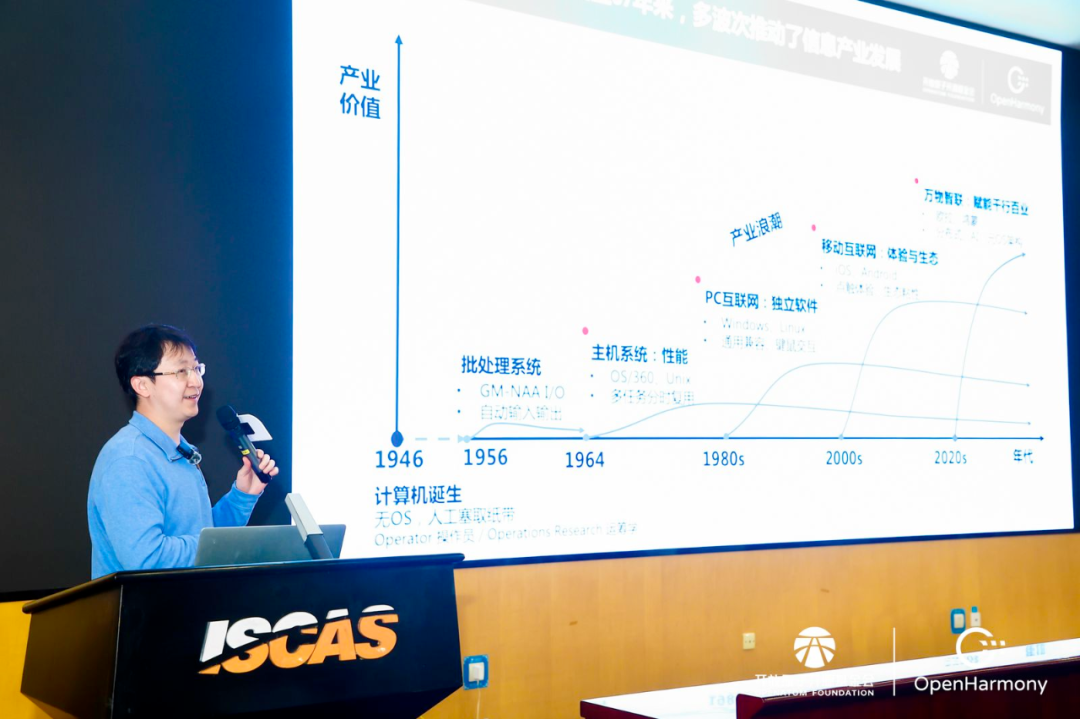
开放原子开源基金会教培与行业研究部部长朱其罡在题为《OpenHarmony 生态:三年磨一剑,加入正当时》的演讲中提到:“OpenHarmony 目前刚发布了 4.0 Release 版本,技术上的设想已经初步实现了全品类设备的覆盖,在各行各业不断涌现落地应用的案例,支撑了关键行业数字底座建设。我们期待各位合作伙伴加入到项目的共建以及项目的推广使用中来,以更加开放的胸襟,更加坚定的信心,投入到这一伟大的历史进程当中。”

浙江大学百人计划研究员、博士生导师张旭鸿做主题分享
浙江大学百人计划研究员、博士生导师张旭鸿带来《上下文感知的 OpenHarmony 内核模糊测试技术》的主旨分享,他提到:“大模型对软件代码的语义理解可以有效解决具有复杂语义的测试用例生成问题,高质量的软件代码调用数据可以进一步提升模型对代码语义的理解。”

华为终端图形图像资深技术专家黄然做主题分享
华为终端图形图像资深技术专家黄然带来《OpenHarmony 图形架构介绍》的主题分享,他提出:“图形渲染是操作系统的核心竞争力,让我们携手整个业界共同构建实时沉浸的图形栈。”

江苏润开鸿数字科技有限公司副总裁、OpenHarmony RISC-V SIG 副组长于大伍做主题分享
江苏润开鸿数字科技有限公司副总裁、OpenHarmony RISC-V SIG 副组长于大伍带来《基于 RISC-V 架构的 OpenHarmony 应用实践》的主题分享,他提到:“RISC-V 指令集架构与 OpenHarmony 操作系统凭借技术设计的先进性以及运营模式的开放性,必然会成为 AIoT 时代端侧主流的 ISA(指令集架构)与 OS 的组合。”

中国科学院软件研究所高级工程师、OpenHarmony 项目群工作委员会委员郑森文做主题分享
中国科学院软件研究所高级工程师、OpenHarmony 项目群工作委员会委员[数学公式]郑森文带来《面向互联和智能的交互技术变迁》的主题分享,他表示:“纵观人类的发展历史,技术的革命与交互方式的改变是相辅相成、相生相依的。今天我们看到 OpenHarmony 扇动了一下翅膀,明天也许能看到平原上掀起的龙卷风。”

北京万里红科技有限公司 OpenHarmony 方案专家胡明启做主题分享
北京万里红科技有限公司 OpenHarmony 方案专家胡明启在《基于 OpenHarmony 的移动政务生态共建》主题演讲中表示:“OpenHarmony 南向生态已趋成熟,北向软件应用生态处于爆发前期,移动办公即将迎来全新跨时代的智能互联体验。”

北京奥思维科技有限公司解决方案总监张鹏做主题分享
北京奥思维科技有限公司解决方案总监张鹏在《OSWare 矿鸿发行版赋能矿山工业智能化》的分享中表示,“未来,作为 OpenHarmony 的重要合作伙伴,奥思维将把 OpenHarmony 生态拓展到智慧楼宇、智慧医疗、智能交通、智慧城市等更广泛的 AIoT 应用场景中,进一步使能开源应用生态,推进开源产业的发展,共同创造丰富多彩的智能世界。”

OpenHarmony Meetup 2023 北京站 全体合影
此外,本次北京站 Meetup 的成功举办,也离不开全体人员的支持与参与,在此特别致谢北京邮电大学 OpenHarmony 技术俱乐部、北京理工大学 OpenHarmony 技术俱乐部、北京航空航天大学 OpenHarmony 技术俱乐部、上海博为峰软件技术股份有限公司组织学员参与线下交流与互动。
OpenHarmony Meetup 城市巡回是一个开放的活动品牌,我们期待更多具备组织能力、有热情的开发者参与进来。如果你对举办 Meetup 活动有兴趣,请带着你的活动方案联系我们,我们将为你提供支持。
联系邮箱:activity@mail.openharmony.io

















 1193
1193

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









