



 本文详细介绍了如何在OpenHarmony应用中使用ArkUI框架进行状态管理,包括状态变量的声明、装饰器如@State和@Link的作用,以及AppStorage与localStorage的区别及其在全局状态共享中的应用。
本文详细介绍了如何在OpenHarmony应用中使用ArkUI框架进行状态管理,包括状态变量的声明、装饰器如@State和@Link的作用,以及AppStorage与localStorage的区别及其在全局状态共享中的应用。
本文转载自《#2023 盲盒+码 # OpenHarmony 应用 ArkUI 状态管理开发范例》,作者:zhushangyuan_
本文根据橘子购物应用,实现 ArkUI 中的状态管理。
在声明式 UI 编程框架中,UI 是程序状态的运行结果,用户构建了一个 UI 模型,其中应用的运行时的状态是参数。当参数改变时,UI 作为返回结果,也将进行对应的改变。这些运行时的状态变化所带来的 UI 的重新渲染,在 ArkUI 中统称为状态管理机制。
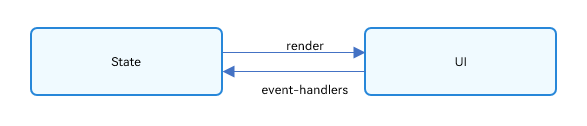
自定义组件拥有变量,变量必须被装饰器装饰才可以成为状态变量,状态变量的改变会引起 UI 的渲染刷新。如果不使用状态变量,UI 只能在初始化时渲染,后续将不会再刷新。 下图展示了 State 和 View(UI)之间的关系。
管理组件拥有的状态
@State 装饰器:组件内状态
@State 装饰的变量,或称为状态变量,一旦变量拥有了状态属性,就和自定义组件的渲染绑定起来。当状态改变时,UI 会发生对应的渲染改变。
在状态变量相关装饰器中,@State 是最基础的,使变量拥有状态属性的装饰器,它也是大部分状态变量的数据源。
@link 装饰器:父子双向同步
子组件中被 @Link 装饰的变量与其父组件中对应的数据源建立双向数据绑定。
@Link 装饰的变量与其父组件中的数据源共享相同的值。
@Componentexport struct DetailPage {@State currentLocation: string = ''}
在父组件 DetailPage 中声明当前定位 currentLocation 变量
Panel(this.isPanel) {Location({ isPanel: $isPanel, currentLocation: $currentLocation })}
将 currentLocation 变量传给子组件 Location
@Componentexport struct Location {@Link currentLocation: string}
子组件用 @Link 装饰的 currentLocation 接收。
@Builder cityList(city: any) {if (this.currentLocation === city.name) {List() {ForEach(city.city, twoCity => {ListItem() {Column() {Text(`${twoCity}`).width('100%').height(30).fontSize(14).onClick(() => {this.currentLocation = city.name + '/' + twoCity})}}})}.width('100%').divider({ strokeWidth: 2, color: $r('app.color.divider'), startMargin: 0, endMargin: 20 })}}
子组件中的 currentLocation 变量改变会同步父组件中的 currentLocation。
管理应用拥有的状态
AppStorage 是应用全局的 UI 状态存储,是和应用的进程绑定的,由 UI 框架在应用程序启动时创建,为应用程序 UI 状态属性提供中央存储。
和 LocalStorage 不同的是,LocalStorage 是页面级的,通常应用于页面内的数据共享。而对于 AppStorage,是应用级的全局状态共享。AppStorage 使用场景和相关的装饰器:@StorageProp 和 @StorageLink
@StorageProp
@StorageProp(key)是和 AppStorage 中 key 对应的属性建立单向数据同步,我们允许本地改变的发生,但是对于 @StorageProp,本地的修改永远不会同步回 AppStorage 中,相反,如果 AppStorage 给定 key 的属性发生改变,改变会被同步给 @StorageProp,并覆盖掉本地的修改。
@Entry@Componentstruct HomePage {@State curBp: string = 'md' // curBp指当前窗口断点,sm代表小屏,md代表中屏,lg代表大屏}
在Home.ets页面中,用 @State 声明当前窗口类型:curBp 变量并赋初值为 md,代表中屏。
isBreakpointSM = (mediaQueryResult) => {if (mediaQueryResult.matches) {this.curBp = 'sm'AppStorage.SetOrCreate('curBp', this.curBp)}}isBreakpointMD = (mediaQueryResult) => {if (mediaQueryResult.matches) {this.curBp = 'md'AppStorage.SetOrCreate('curBp', this.curBp)}}isBreakpointLG = (mediaQueryResult) => {if (mediaQueryResult.matches) {this.curBp = 'lg'AppStorage.SetOrCreate('curBp', this.curBp)}}
根据屏幕尺寸,将 curBp 设置为相应的值,并用 SetOrCreate()方法保存在 AppStorage 中。
在子组件 NavigationHomePage 中直接使用 curBp 变量
@Entry@Componentexport struct NavigationHomePage {@StorageProp('curBp') curBp: string = 'sm'}
curBp 是根据窗口的尺寸判断的,是不能改变的,因此使用 @StorageProp(‘curBp’)与 AppStorage(‘curBp’)建立单向数据同步。
@StorageLink
@StorageLink(key)是和 AppStorage 中 key 对应的属性建立双向数据同步:
1. 本地修改发生,该修改会被同步回 AppStorage 中;
2. AppStorage 中的修改发生后,该修改会被同步到所有绑定 AppStorage 对应 key 的属性上,包括单向(@StorageProp 和通过 Prop 创建的单向绑定变量)、双向(@StorageLink 和通过 Link 创建的双向绑定变量)变量和其他实例(比如 PersistentStorage)。
@Entry@Componentstruct HomePage {@StorageLink('shoppingCartGoodsList') shoppingCartGoodsList: { data: { id: number } }[] = []}
在Home.ets页面中,用 @StorageLink 装饰器定义 shoppingCartGoodsList,用于获取全局的购物车商品列表。
this.emitterClass.setShoppingCartGoodsList((eventData)=>{this.shoppingCartGoodsList.push(eventData.data.id)AppStorage.SetOrCreate('shoppingCartGoodsList', this.shoppingCartGoodsList)})
使用 AppStorage.SetOrCreate(‘shoppingCartGoodsList’, this.shoppingCartGoodsList)将购物车商品列表保存在 AppStorage 中。
因为购物车中的商品会联动的变化,比如在商品的详情页将商品添加至购物车,在首页也需要更新购物车信息,因此购物车商品列表采用 @StorageLink 装饰器装饰,与 AppStorage(‘shoppingCartGoodsList’)建立双向同步。
运行测试效果
执行以下命令,可以下载橘子购物应用工程:
git initgit config core.sparsecheckout trueecho code/Solutions/Shopping/OrangeShopping/ > .git/info/sparse-checkoutgit remote add origin https://gitee.com/openharmony/applications_app_samples.gitgit pull origin master

















 1149
1149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









