



1.
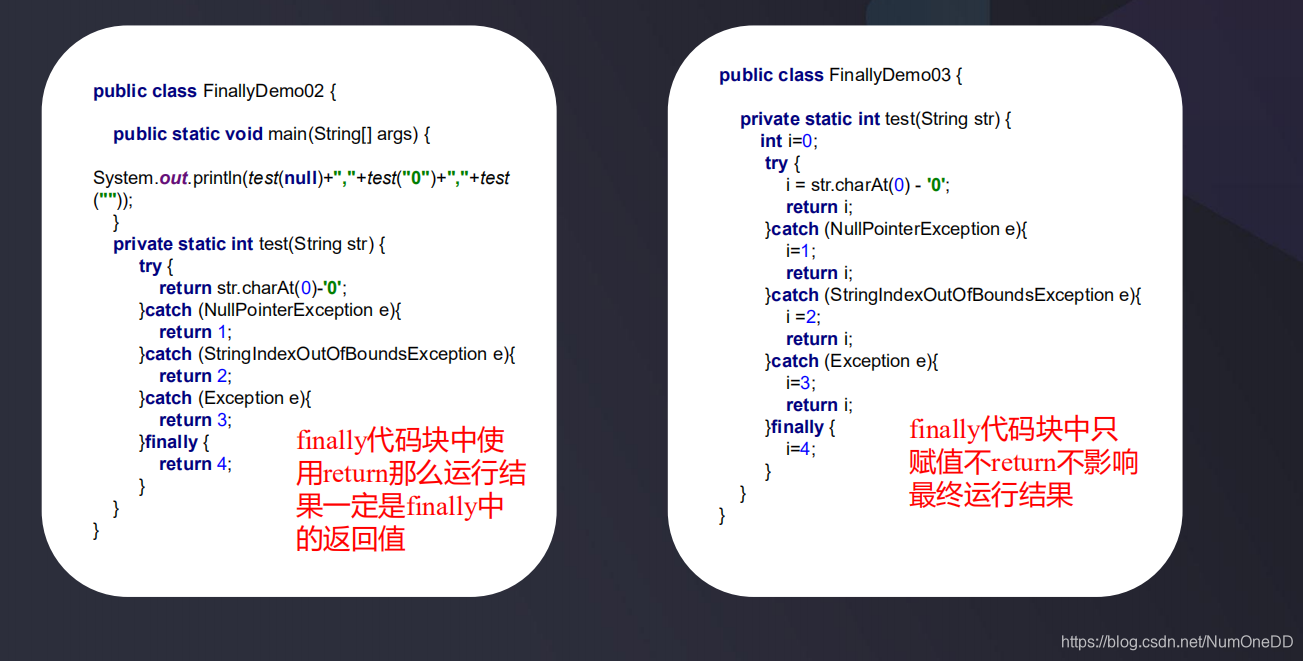
finally关键字和return关键字执行顺序:
1.只有与finally对应的try语句块得到执行的情况下finally里面的内容才会执行,如果执行不到try语句块中的内容的时候,方法就已经结束了(但是当try中的语句执行了退出虚拟机的操作 System.exit(0)的操作时,finally里面的内容不执行)
2.如何执行到了finally中的代码块,其中有return,那么 return的值一定是finall中的值
3.finally代码块中的内容如果有赋值的话,不影响最终运行结果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









