




许多开发者在调试数字对讲机模块(DMR 类)时,会在发射状态听到“嘟嘟嘟”的TDD 噪音。这不是声音芯片坏了,而是TDD(时分双工)在收/发切换时带来的电流脉动,通过电源/地回路、PCB 布局耦合、麦克风偏置等路径“混入”音频链路。
本文用实操告诉你:为什么会响、怎么快速定位、如何一步步消音——从“插一个合适的功率电感”到“四层板抗干扰布局”,给出元器件选型、波形判读、决策树等进行讲解.
什么是 TDD 噪音?(现象与原理)
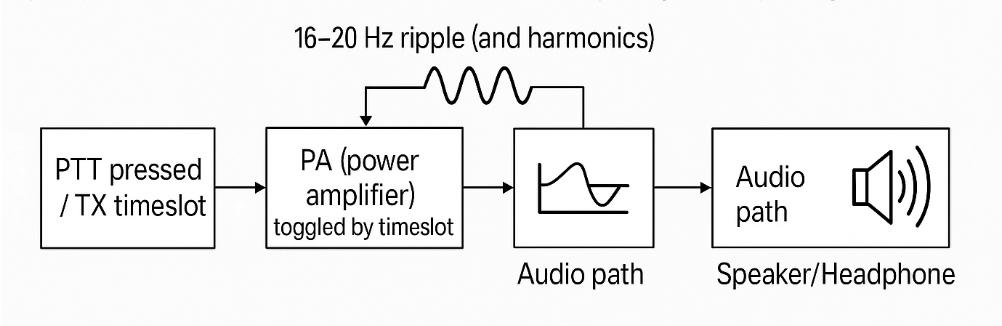
现象:在按下 PTT 发射或发射时隙工作时,喇叭或耳机里出现16–20 Hz 一带的“嘟嘟”低频及其谐波(几十~几百 Hz),像“电机/机关枪”声。
根因(通俗版):TDD 工作把功放 PA按时隙周期性开关;电流猛起猛落,这股“脉动”经电源/地/耦合跑到音频链路,被音频电路当作低频包络给“检波”出来,自然就听见了。
工程归纳:
电源串扰:TDD 脉动→电源/地线上形成纹波/跌落→音频基准被“抖”了;
版图耦合:RF/PA 大电流回路靠近 MIC/音频/控制线→电容/电感/共阻抗耦合;
滤波不足:麦克风偏置与 3.3V“净电源”去耦、PSRR 不够。
小贴士:TDD 一帧常见 60 ms,基频约 16.7 Hz;你在频谱里看到的“整齐小齿”就是它的谐波梳状谱。
三条“入门级”快速止噪路线:
适合初次导入或样机阶段,不动大结构:
路线 A|电源入口“L + C”隔离(首选)
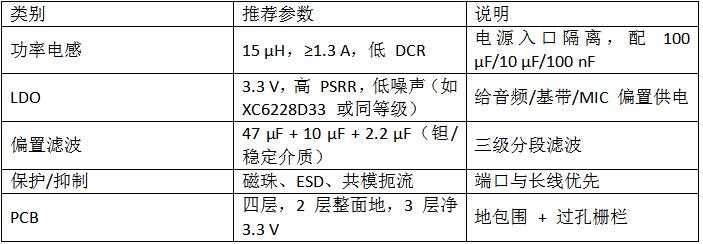
在模块电源输入串 15 µH、≥1.3 A 的功率电感,并配 100 µF(低 ESR)+ 10 µF + 100 nF 近端去耦。
作用:构成低通,把 TDD 低频包络和开关尖峰隔在“脏端”。
路线 B|给音频/基带一条“净 3.3V”(高 PSRR LDO)
用高 PSRR、低噪声 LDO(如 XC6228D33 或同等级)给基带/音频/MIC 偏置供电。
作用:抑制输入纹波,隔离“脏电源”。
路线 C|麦克风偏置“三段式”滤波 + 地包围
对 MIC Vbias 用 47 µF + 10 µF + 2.2 µF(钽或稳定介质)分段滤波,并用接地铜箔环绕(地包围 + 过孔栅栏)。
作用:把包络截断在偏置端,让话筒只“听”声音、不“听”电源。
面向工程师的系统方案(电源完整性/PCB/器件)
电源完整性(PI)设计要点:
目标阻抗法:Ztarget=ΔV/ΔI。若发射阶跃 ΔI=0.5A,允许 ΔV=50mV,则 Ztarget≤0.1 ΩZ_。
去耦分层:100 nF(高频)贴脚、10 µF(中频)近区、100 µF(低频)入口。
电感选型:饱和电流>峰值×1.5、DCR 越低越好、自谐振高于工作频段。
四层板推荐叠层与回流
顶层:关键信号/RF 短直控阻;
2 层:整面地(Return 就近闭合,过孔围栏);
3 层:独立 +3.3 V 净电源平面(给音频/基带);
底层:次要信号与“脏电源”配电。
PA 大电流回路最小环路面积,远离 MIC/音频/时钟。
关键器件与版图
LDO:看PSRR 曲线(几十 Hz–几百 kHz 仍高)、负载瞬态、输出噪声;按 datasheet 选 OUT 电容/ESR。
磁珠/共模:对出线口与接口端口做CM/ESD,注意落地与回流路径。
“地包围”:MIC 偏置与音频线外侧布连续接地铜,以多点过孔并地。
集成与联调要点(与外部 MCU / 多模块并行)
数字接口 SI:TXD/RXD 控阻抗、少过孔、45°转角;与 RF/PA 拉开。
地电位一致:单点大地参考,避免跨区回流与地弹。
多模块同步:多路 TDD 异步会“拍频”,可由主控统一时序减小拍频拍合噪声。
屏蔽策略:先局部屏蔽罩(PA/RF/电源),再评估系统级屏蔽与通风/导电垫片。
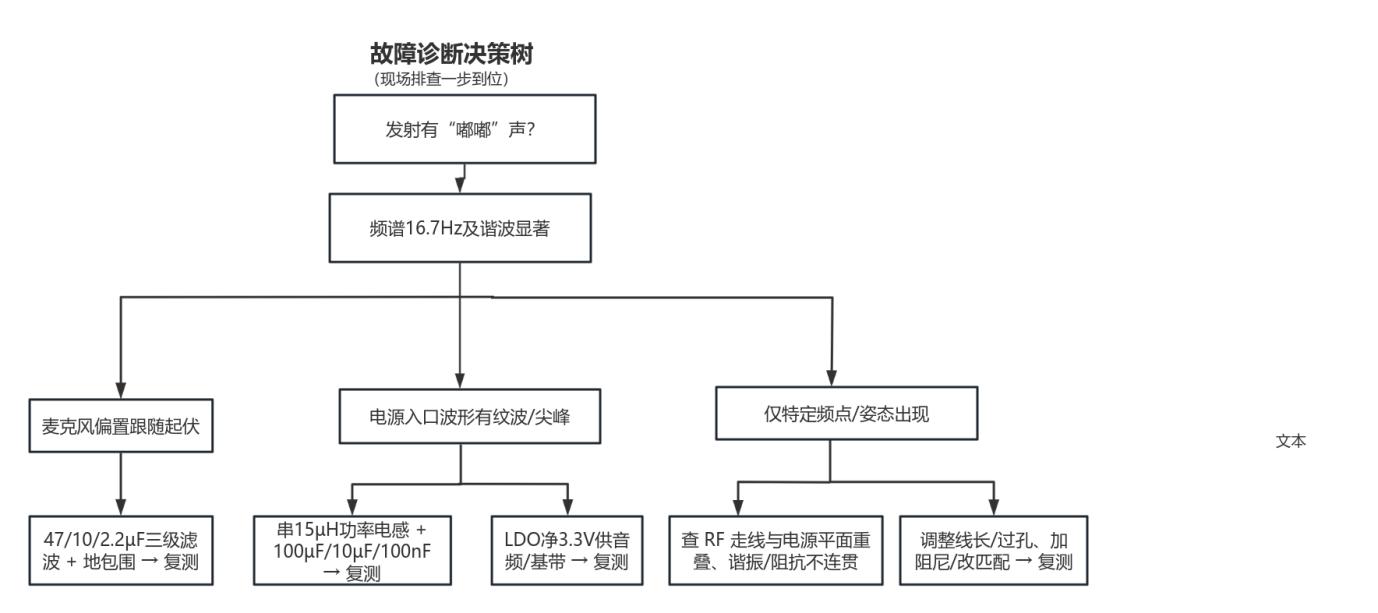
故障诊断决策树
术语小辞典(科普但不“降维”)
TDD(Time Division Duplex):同频点按时间分时收/发;DMR 常见一帧 60 ms。
EMI/EMC:电磁干扰/电磁兼容;系统既要少“吵人”,也要“耐吵”。
SI/PI:信号完整性/电源完整性;上升沿形状、回流路径与供电目标阻抗缺一不可。
LDO/PSRR:线性稳压器/电源抑制比;PSRR 越高越能把“脏电”变“净电”。
地包围:用连续接地铜围住敏感线/块并多点并地,像“小法拉第笼”。
验收与量化指标(用数据说话)
音频侧
SNR ≥ 80 dB(语音带宽条件下);
THD+N ≤ 0.1% @1 kHz;
低频噪声峰(10–200 Hz)较整改前降低 ≥ 15 dB。
电源侧
发射阶跃时 ΔV ≤ ±2%、恢复时间 < 100 µs;
20 MHz 带宽测得 纹波 < 10 mVpp;
入口/净 3.3 V 两侧纹波衰减 > 20 dB。
FAQ
Q1:只加一个功率电感就够吗?
A:对“入口纹波为主”的场景常立竿见影;若 MIC 偏置/版图耦合也在作祟,还需配合 高 PSRR LDO + 偏置三级滤波 + 地包围。
Q2:为什么我加了大电容,噪音反而怪?
A:可能引入了新的谐振/回流路径或LDO 稳定性不匹配。遵循 datasheet 的容值/ESR窗口,电容贴近引脚,并检查环路面积。
Q3:两台模块靠近就“更吵”?
A:多路 TDD 不同步易拍频;尝试时序同步或物理隔离/屏蔽。
下列为 ASCII/线框占位图 + ALT 文案,方便设计师在 AI/PS 中重绘为品牌风格图。
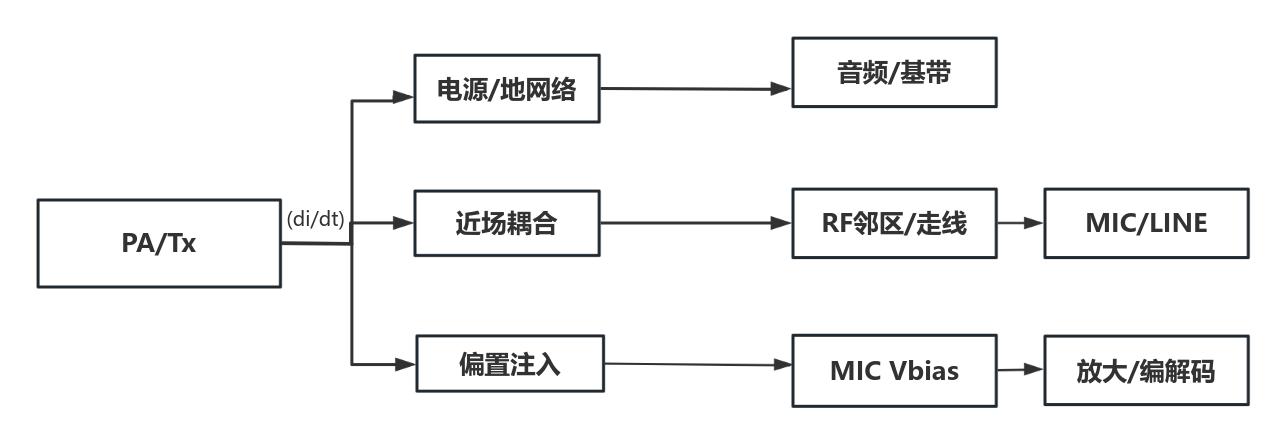
TDD 噪音传播三路径概览(ALT:TDD 脉动经电源/地、版图耦合与 MIC 偏置进入音频链路)
入口“L + C”隔离低通(ALT:15µH 功率电感与多级电容形成低通,隔离TDD包络)
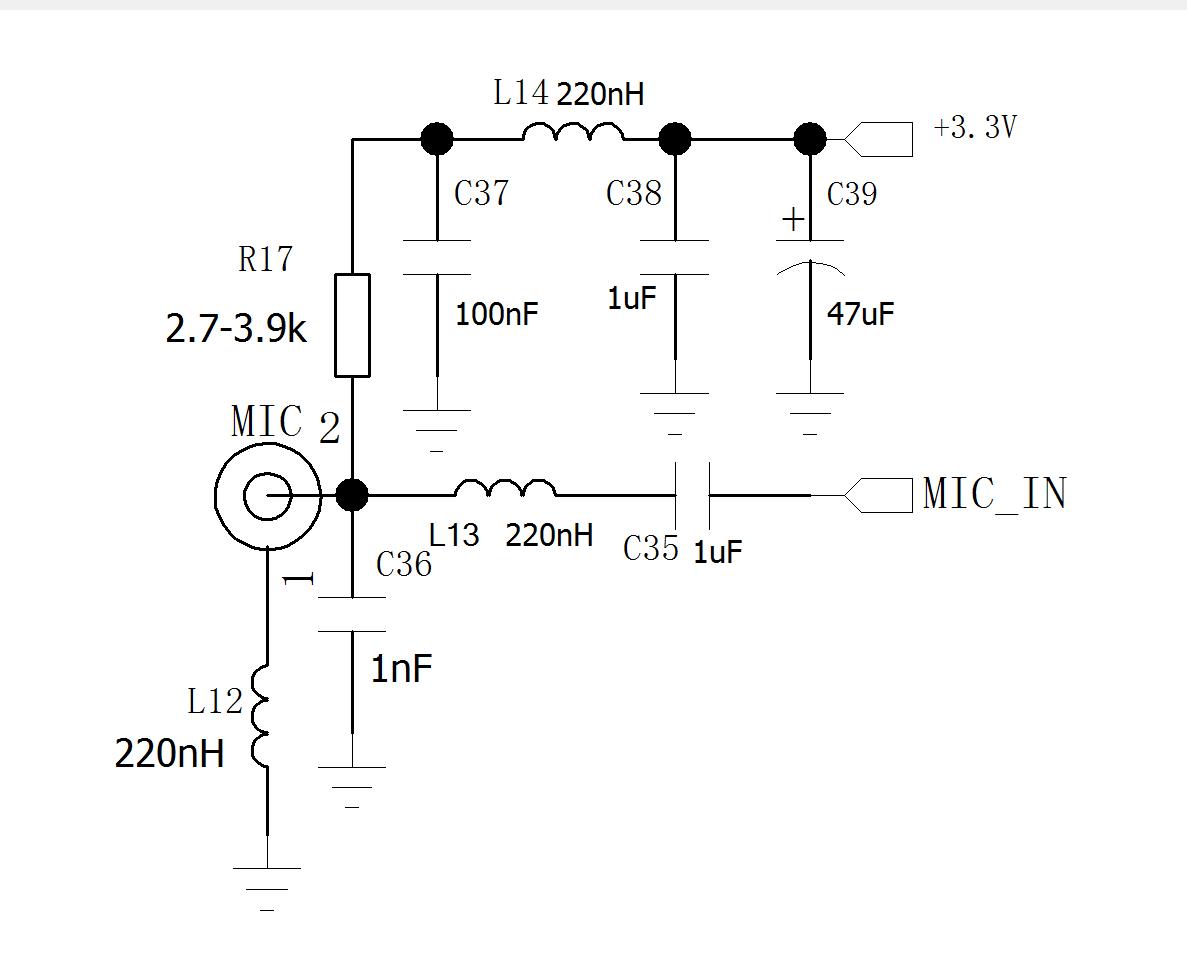
麦克风偏置三级滤波 + 地包围(ALT:Vbias 三级钽电容+接地围栏)
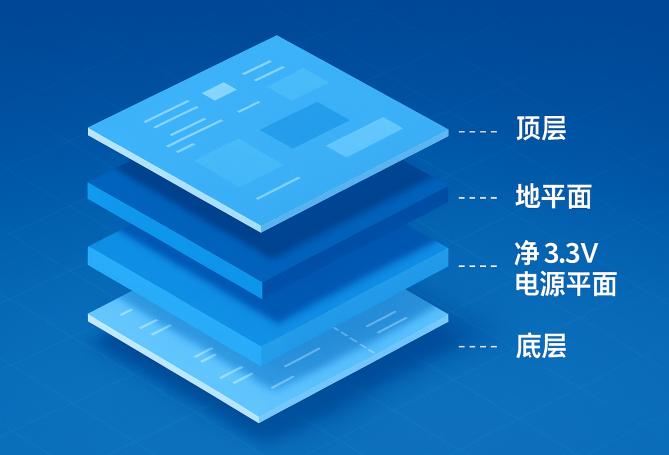
推荐四层板叠层与分区(ALT:顶层信号/射频,2层整面地,3层净3.3V,底层次要信号/脏电)
Top : RF/关键信号(短直控阻) | 远离音频GND2 : 整面地(Return就近 + 过孔围栏)PWR3 : +3.3V“净电源”平面(音频/基带专用)Bot : 次要信号 + 脏电配电(PA近端)
索引式“备料清单”
注:以上为工程思路示例,实际以产品规格书与合规测试为准。
TDD 噪音并不可怕。“入口 L+C 隔离 + 高 PSRR 净电源 + 偏置三级滤波 + 四层板地包围”是一套可移植到多数对讲/语音无线产品的通用组合拳。从快速止噪到系统级治本,用数据与版图说话,你的对讲机项目就能既“能打”又“好听”。

















 2439
2439

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









