




简单且高效的水域物探轨迹坐标转换程序
前言
水上测线的高精度定位是水域物探的难题,水域磁法、水域地震实施时常采用船舶拖拽传感器进行走航式观测,GPS仪器放在船舶上测量,造成船舶位置与传感器位置存在偏差,后期资料整理需要校正。每次水域物探采集几万至几十万个平面坐标数据,采用手工校正费时费力,且较易出错。因此,本人开发了一套简单且高效的水域物探轨迹坐标校正程序。
1、问题提出
水域磁法、水域地震是一种传统的水域物探方法,对水域勘探具有较好的效果。
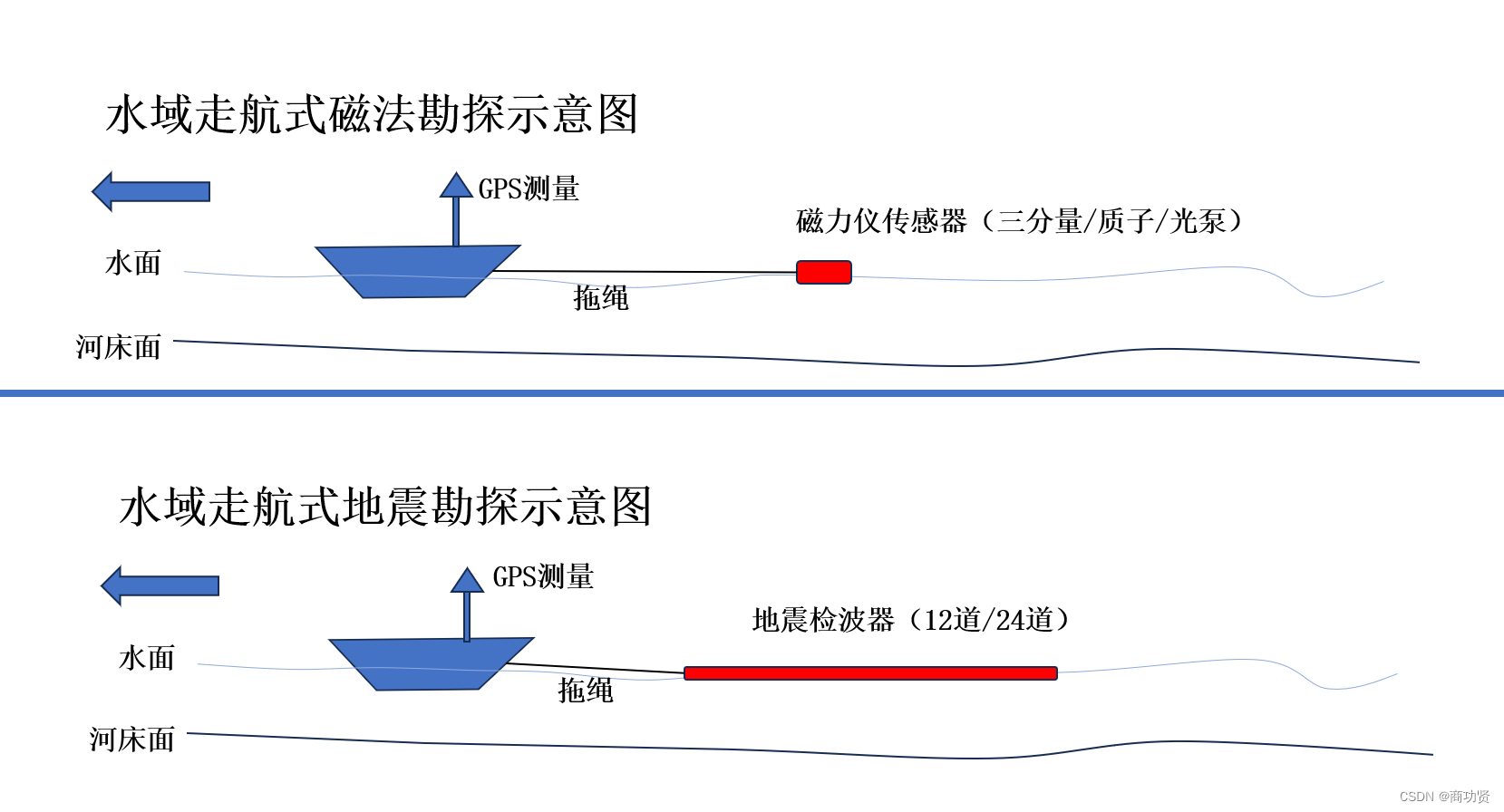
如上图所示,水域磁法/水域地震勘探均需要在船舶尾部用拖绳牵引对应传感器,进行走航式勘探,将GPS固定在船舶上进行位置测量。GPS与物探传感器间存在一定的距离。
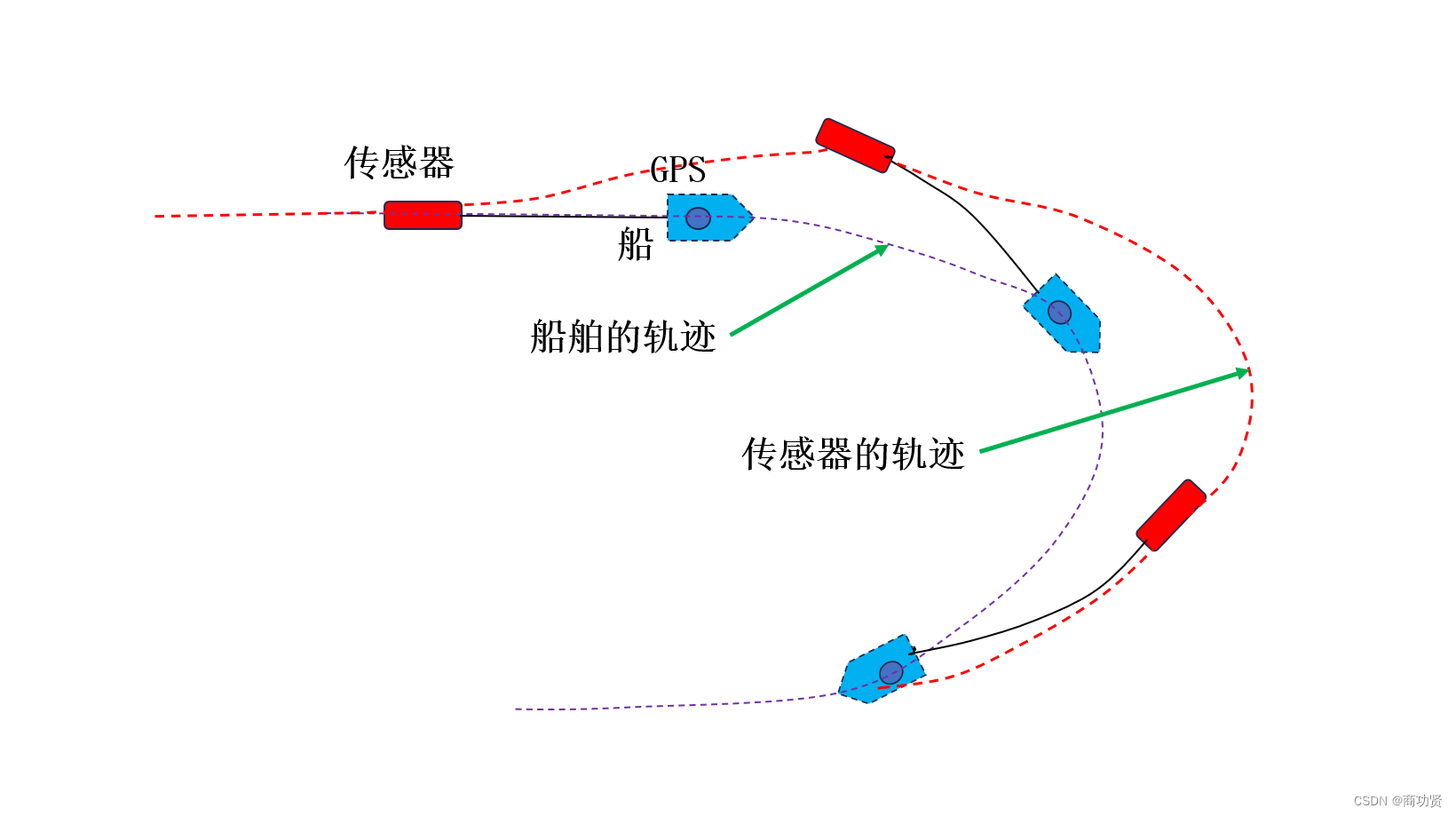
当船舶在水面上行驶时,船舶的轨迹与传感器的轨迹不一致,GPS只能测量船舶的轨迹,但是我们物探需要得到精确的传感器轨迹。尤其是在船舶拐弯时,传感器轨迹存在较大的偏移。
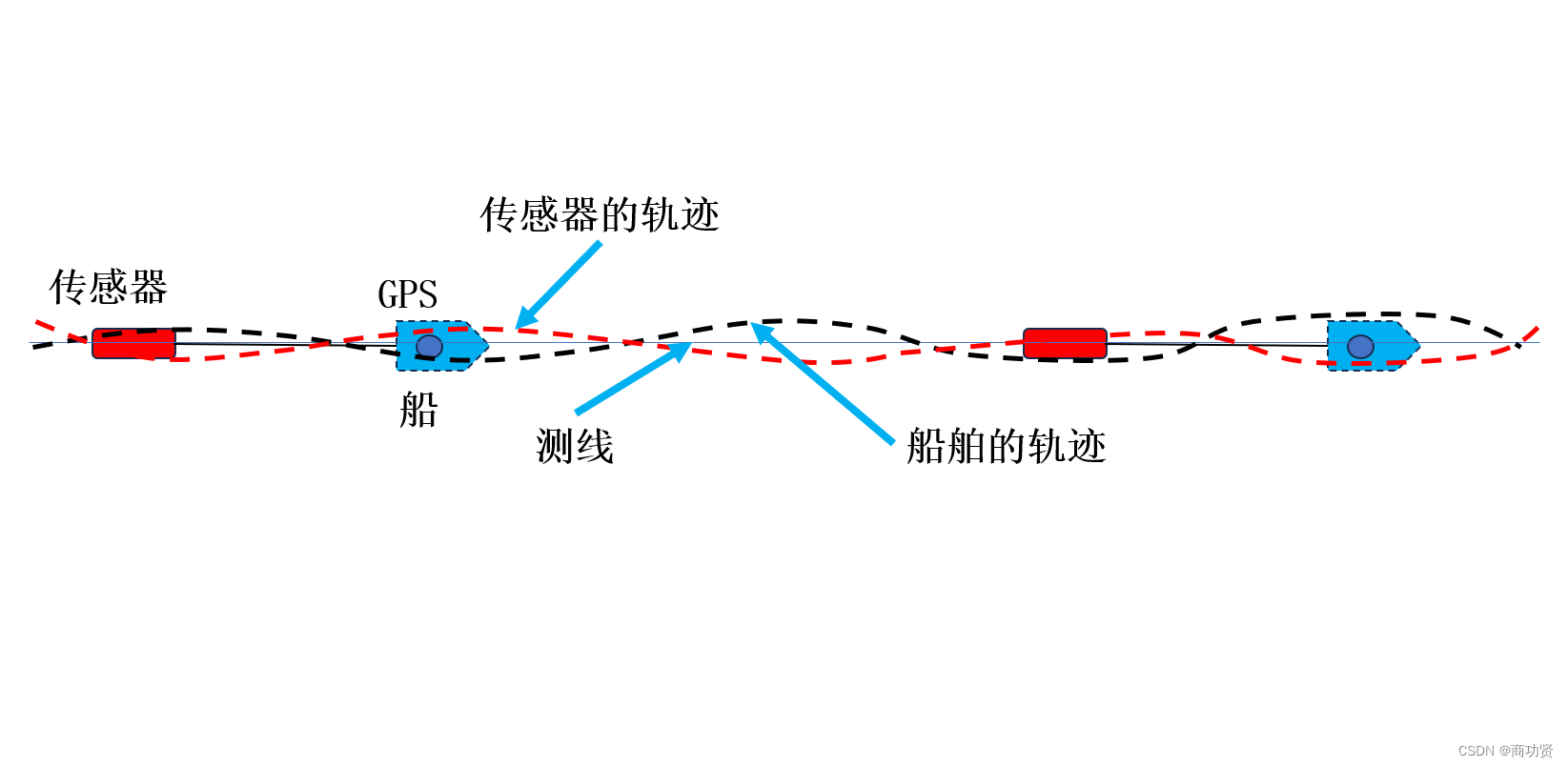
即使船舶想要沿着测线直线行驶,由于水流与风浪作用,船舶也会在测线左右摆动,传感器轨迹与船舶轨迹不一致。
因此,准确校正传感器轨迹坐标十分重要。
2、程序设计
需要分类讨论多种情况,以下为一种情况:当船舶沿直线行驶时,假设A点为当前船舶所在位置,B点为船舶行驶的下一个位置,O点为传感器位置。
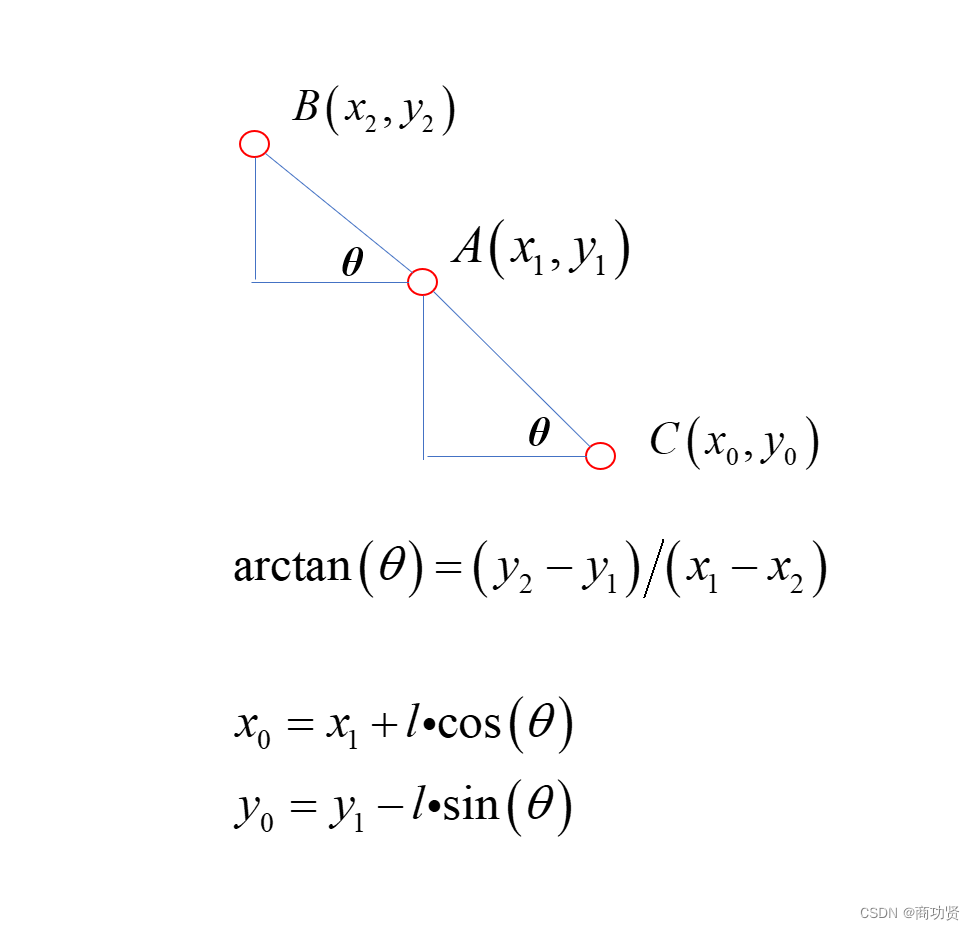
根据A、B两点的位置,即可较简单的计算出O点的位置,计算代码如下:
close all
clear all
clc
% 读取原始数据
data = xlsread("D:水域磁法勘探数据\轨迹转换程序 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 4513
4513

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











