



一、蜉蝣算法
蜉蝣是属于蜉蝣目的昆虫,是古翅目昆虫的一部分。据估计,全世界有超过3000种蜉蝣。它们的名字来源于它们主要出现在英国的五月。从卵中孵化出来后,肉眼可以看到未成熟的蜉蝣,它们花了几年时间成长为水生若虫,直到它们准备好成年后上升到水面。一只成年蜉蝣只存活几天,直到它完成繁殖的最终目标。为了吸引雌性,大多数雄性成虫成群结队地聚集在水面上几米的地方,通过特有的上下运动模式,表演一场婚礼舞蹈。雌鸟飞入这些蜂群,为了与空中的雄性交配。交配可能只持续几秒钟,当交配完成后,雌鸟将卵落在水面上,它们的生命周期就结束了。

1.1 雄性蜉蝣的运动
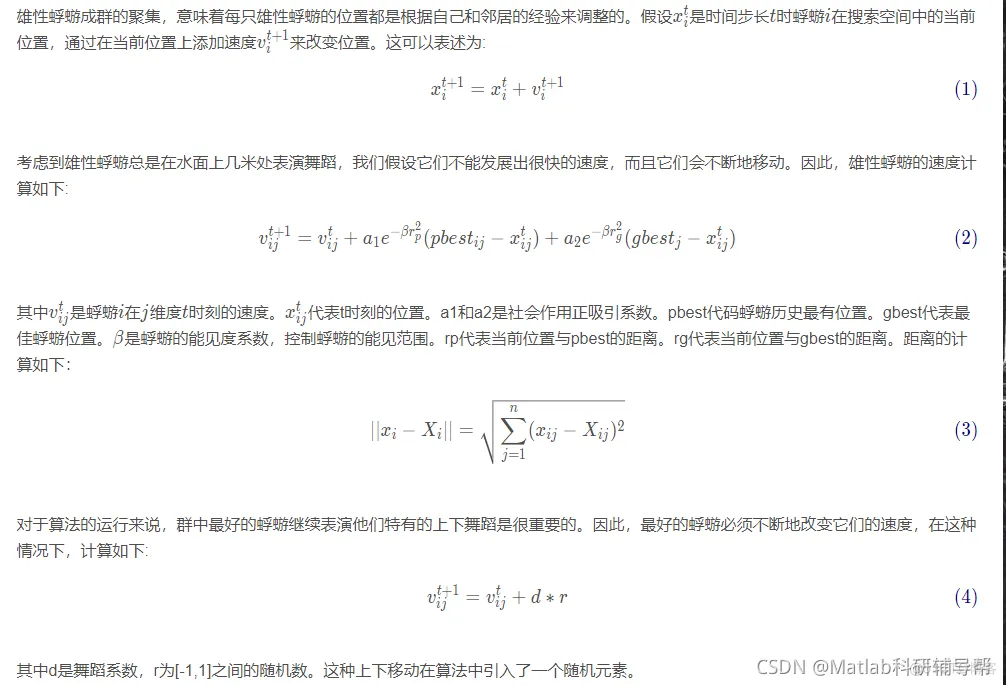
1.2 雌性蜉蝣的运动
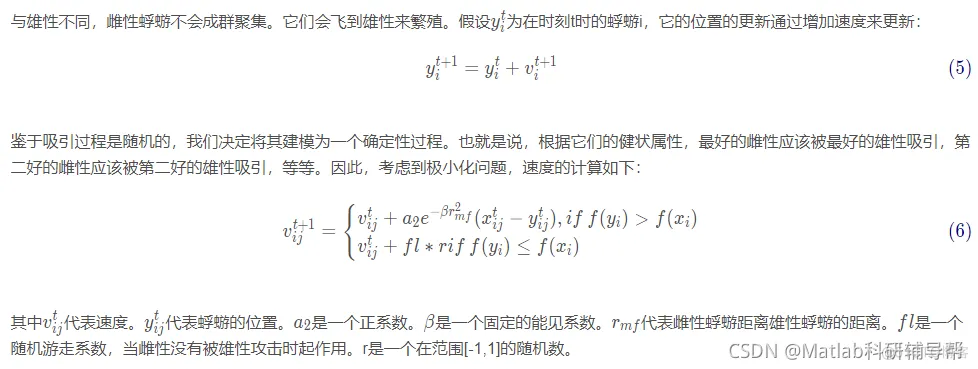
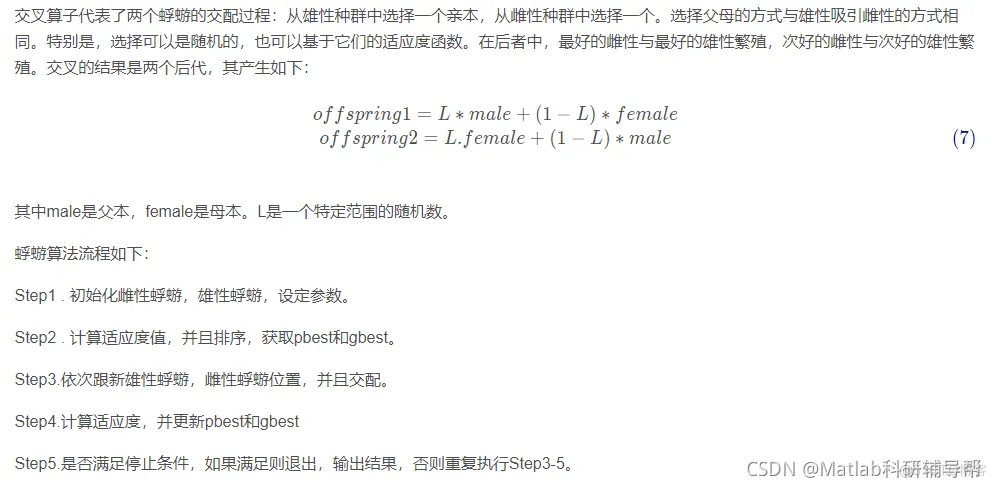
1.3 蜉蝣交配
二、部分代码
%%
clc; clear; close all;
%% Problem Definition
% Objective Function
ANSWER=listdlg('PromptString','Choose Objective Function','SelectionMode','single', 'ListString', {'1. Sphere', '2. Rastrigin'});
if eq(ANSWER,1); ObjectiveFunction=@(x) Sphere(x); funcname='Sphere';
elseif eq(ANSWER,2); ObjectiveFunction=@(x) Rastrigin(x); funcname='Rastrigin';
else; disp('Terminated'); return
end
ProblemSize=[1 50]; % Decision Variables Size
LowerBound=-10; % Decision Variables Lower Bound
UpperBound= 10; % Decision Variables Upper Bound
%% Mayfly Parameters
methname='Mayfly Algorithm';
MaxIt=2000; % Maximum Number of Iterations
nPop=20; nPopf=20; % Population Size (males and females)
g=0.8; % Inertia Weight
gdamp=1; % Inertia Weight Damping Ratio
a1=1.0; % Personal Learning Coefficient
a2=1.5; a3=1.5; % Global Learning Coefficient
beta=2; % Distance sight Coefficient
dance=5; % Nuptial Dance
fl=1; % Random flight
dance_damp=0.8; % Damping Ratio
fl_damp=0.99;
% Mating Parameters
nc=20; % Number of Offsprings (also Parnets)
nm=round(0.05*nPop); % Number of Mutants
mu=0.01; % Mutation Rate
% Velocity Limits
VelMax=0.1*(UpperBound-LowerBound); VelMin=-VelMax;
%% Initialization
empty_mayfly.Position=[];
empty_mayfly.Cost=[];
empty_mayfly.Velocity=[];
empty_mayfly.Best.Position=[];
empty_mayfly.Best.Cost=[];
Mayfly=repmat(empty_mayfly,nPop,1); % Males
Mayflyf=repmat(empty_mayfly,nPopf,1); % Females
GlobalBest.Cost=inf;
funccount=0;
for i=1:nPop
% Initialize Position of Males
Mayfly(i).Position=unifrnd(LowerBound,UpperBound,ProblemSize);
% Initialize Velocity
Mayfly(i).Velocity=zeros(ProblemSize);
% Evaluation
Mayfly(i).Cost=ObjectiveFunction(Mayfly(i).Position);
% Update Personal Best
Mayfly(i).Best.Position=Mayfly(i).Position;
Mayfly(i).Best.Cost=Mayfly(i).Cost;
funccount=funccount+1;
% Update Global Best
if Mayfly(i).Best.Cost<GlobalBest.Cost
GlobalBest=Mayfly(i).Best;
end
end
for i=1:nPopf
% Initialize Position of Females
Mayflyf(i).Position=unifrnd(LowerBound,UpperBound,ProblemSize);
Mayflyf(i).Velocity=zeros(ProblemSize);
Mayflyf(i).Cost=ObjectiveFunction(Mayflyf(i).Position);
funccount=funccount+1;
% Update Global Best (Uncomment if you use the PGB-IMA version)
%if Mayflyf(i).Best.Cost<GlobalBest.Cost
% GlobalBest=Mayflyf(i).Best;
%end
end
BestSolution=zeros(MaxIt,1);
%% Mayfly Main Loop
for it=1:MaxIt
for i=1:nPopf
% Update Females
e=unifrnd(-1,+1,ProblemSize);
rmf=(Mayfly(i).Position-Mayflyf(i).Position);
if Mayflyf(i).Cost>Mayfly(i).Cost
Mayflyf(i).Velocity = g*Mayflyf(i).Velocity ...
+a3*exp(-beta.*rmf.^2).*(Mayfly(i).Position-Mayflyf(i).Position);
else
Mayflyf(i).Velocity = g*Mayflyf(i).Velocity+fl*(e);
end
% Apply Velocity Limits
Mayflyf(i).Velocity = max(Mayflyf(i).Velocity,VelMin);
Mayflyf(i).Velocity = min(Mayflyf(i).Velocity,VelMax);
% Update Position
c/2,2);
for k=1:nc/2
% Select Parents
i1=k;
i2=k;
p1=Mayfly(i1);
p2=Mayflyf(i2);
% Apply Crossover
[MayflyOffspring(k,1).Position, MayflyOffspring(k,2).Position]=Crossover(p1.Position,p2.Position,LowerBound,UpperBound);
% Evaluate Offsprings
MayflyOffspring(k,1).Cost=ObjectiveFunction(MayflyOffspring(k,1).Position);
if MayflyOffspring(k,1).Cost<GlobalBest.Cost
GlobalBest=MayflyOffspring(k,1);
end
funccount=funccount+1;
MayflyOffspring(k,2).Cost=ObjectiveFunction(MayflyOffspring(k,2).Position);
if MayflyOffspring(k,2).Cost<GlobalBest.Cost
GlobalBest=MayflyOffspring(k,2);
end
funccount=funccount+1;
MayflyOffspring(k,1).Best.Position = MayflyOffspring(k,1).Position;
MayflyOffspring(k,1).Best.Cost = MayflyOffspring(k,1).Cost;
MayflyOffspring(k,1).Velocity= zeros(ProblemSize);
MayflyOffspring(k,2).Best.Position = MayflyOffspring(k,2).Position;
MayflyOffspring(k,2).Best.Cost = MayflyOffspring(k,2).Cost;
MayflyOffspring(k,2).Velocity= zeros(ProblemSize);
end
MayflyOffspring=MayflyOffspring(:);
% Mutation
MutMayflies=repmat(empty_mayfly,nm,1);
for k=1:nm
% Select Parent
i=randi([1 nPop]);
p=MayflyOffspring(i);
%p=Mayfly(i);
MutMayflies(k).Position=Mutate(p.Position,mu,LowerBound,UpperBound);
% Evaluate Mutant
MutMayflies(k).Cost=ObjectiveFunction(MutMayflies(k).Position);
[~, SortMayflies]=sort([Mayfly.Cost]);
Mayfly=Mayfly(SortMayflies);
Mayfly=Mayfly(1:nPop); % Keep best males
[~, SortMayflies]=sort([Mayflyf.Cost]);
Mayflyf=Mayflyf(SortMayflies);
Mayflyf=Mayflyf(1:nPopf); % Keep best females
BestSolution(it)=GlobalBest.Cost;
disp([methname ' on the ' funcname ' Function: Iteration = ' num2str(it) ', ' funcname ', Evaluations = ' num2str(funccount) '. Best Cost = ' num2str(BestSolution(it))]);
g=g*gdamp;
dance = dance*dance_damp;
fl = fl*fl_damp;
end
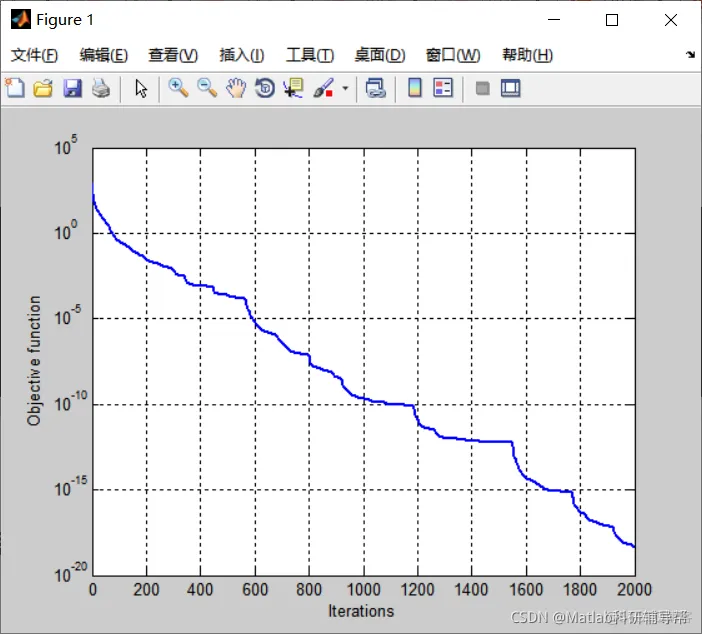
%% Results
figure;
plot(BestSolution,'LineWidth',2); semilogy(BestSolution,'LineWidth',2);
xlabel('Iterations'); ylabel('Objective function'); grid on;
%%
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
- 59.
- 60.
- 61.
- 62.
- 63.
- 64.
- 65.
- 66.
- 67.
- 68.
- 69.
- 70.
- 71.
- 72.
- 73.
- 74.
- 75.
- 76.
- 77.
- 78.
- 79.
- 80.
- 81.
- 82.
- 83.
- 84.
- 85.
- 86.
- 87.
- 88.
- 89.
- 90.
- 91.
- 92.
- 93.
- 94.
- 95.
- 96.
- 97.
- 98.
- 99.
- 100.
- 101.
- 102.
- 103.
- 104.
- 105.
- 106.
- 107.
- 108.
- 109.
- 110.
- 111.
- 112.
- 113.
- 114.
- 115.
- 116.
- 117.
- 118.
- 119.
- 120.
- 121.
- 122.
- 123.
- 124.
- 125.
- 126.
- 127.
- 128.
- 129.
- 130.
- 131.
- 132.
- 133.
- 134.
- 135.
- 136.
- 137.
- 138.
- 139.
- 140.
- 141.
- 142.
三、仿真结果

四、参考文献
Zervoudakis, K., & Tsafarakis, S. (2020). A mayfly optimization algorithm. Computers & Industrial Engineering, 145, 106559. https://doi.org/10.1016/j.cie.2020.106559

















 452
452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









