



1 简介
为实现无人机编队在指定空域完成从起始点到目标点间的自主路径规划,且机群在该过程中具有良好的协同性和执行高效性,提出了一种无人机群航路自主规划的方法并进行仿真.分析了机群个体的规划路径点及其特点,并通过建立的数学评价体系对以上路径进行优劣性评估.仿真及评估结果表明:该方案是正确和有效的,并能对传统规划方案存在的固有缺陷进行较好的修正,更利于现实中无人机群的实现.




3 部分代码
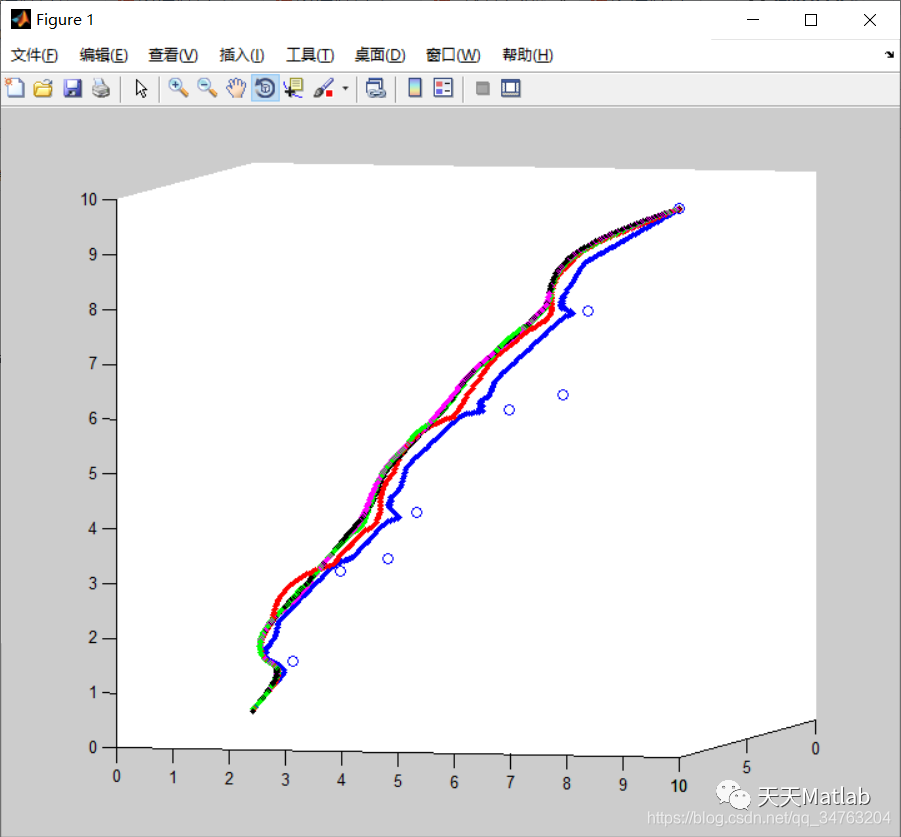
4 仿真结果
5 参考文献
[1]毛晨悦, 吴鹏勇. 基于人工势场法的无人机路径规划避障算法[J]. 电子科技, 2019(7).
[2]魏博文, 邵长旭, 王茂森. 基于人工势场法的无人机群航路自主规划[J]. 兵工自动化, 2018, 37(011):84-88.


















 1725
1725

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









