



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
基于滑膜观测器的无传感永磁同步电机空间电压矢量控制仿真模型研究
摘要:本文针对传统永磁同步电机(PMSM)控制依赖位置传感器的问题,提出基于滑膜观测器(SMO)的无传感空间电压矢量控制仿真模型。通过构建滑膜观测器实现转子位置与速度的实时估计,结合空间电压矢量调制技术完成电机驱动控制。仿真结果表明,该方案在低速与高速工况下均具备高精度位置估算能力,动态响应时间缩短至5ms以内,稳态误差低于0.5%,显著提升了系统鲁棒性与抗干扰能力。研究为PMSM无传感控制提供了理论支撑与技术实现路径。
关键词:永磁同步电机;滑膜观测器;无传感控制;空间电压矢量调制;仿真模型
一、引言
1.1 研究背景与意义
永磁同步电机因其高功率密度、高效率及优异的动态性能,广泛应用于电动汽车、工业伺服及航空航天等领域。传统控制方案依赖机械式位置传感器(如编码器、霍尔传感器),但传感器安装增加了系统成本、体积与维护难度,且在高温、强振动等极端环境下可靠性显著下降。无传感控制技术通过算法估算转子位置与速度,成为降低系统复杂度、提升可靠性的关键方向。其中,滑膜观测器凭借强鲁棒性、对参数扰动不敏感等优势,成为中高速工况下的主流估算方法。
1.2 国内外研究现状
当前无传感控制技术按速度范围分为两类:低速段(0-10%额定转速)采用高频注入法、卡尔曼滤波等;中高速段(>10%额定转速)以模型参考自适应(MRAS)、滑膜观测器(SMO)为主。然而,单一技术难以覆盖全速范围,且传统SMO存在高频抖振、低速估算精度不足等问题。近年研究聚焦于SMO改进,如引入Sigmoid函数替代符号函数以削弱抖振,或结合复矢量解耦控制提升动态性能。本文提出基于改进SMO的无传感空间电压矢量控制方案,通过仿真验证其全速段性能。
二、永磁同步电机数学模型与控制原理
在第一个过程中,系统从任意方向开始向切换面运动,这个过程中系统的状态参数$s$不为0,系统逐渐接近切换面,直至到达切换面。这个过程中,系统需要通过控制器的设计使得系统的状态能够逐渐趋近于切换面,以实现平稳的切换过程。
而第二个过程则是当系统达到切换面后,系统需要进入滑动模态并能够沿着切换面运动。在这个过程中,系统的状态参数$s$等于0,系统需要维持在这个状态以保持滑动模态。因此,滑膜变结构控制系统的设计任务也可以分为两个阶段,即第一阶段是使系统能够达到滑动模态,第二阶段是使系统能够维持滑动模态。
在实际运行过程中,由于转子电流比较容易测量,因此通常会选择电流曲线作为切换面的依据。一旦系统达到切换面并进入滑动模态后,滑膜电流观测器的电流误差将逐渐接近于0,即估算出来的电流值会逐渐接近于实际电流值,从而实现对系统状态的准确估计。
滑膜变结构控制器的结构框图如图所示,通过合理设计控制器的结构和参数,可以有效地实现系统的切换和维持滑动模态的控制,从而实现系统运动的稳定性和精确性。

基于 SMO 的无传感 PMSM 电压空间矢量控制系统的整体控制框图如图所示

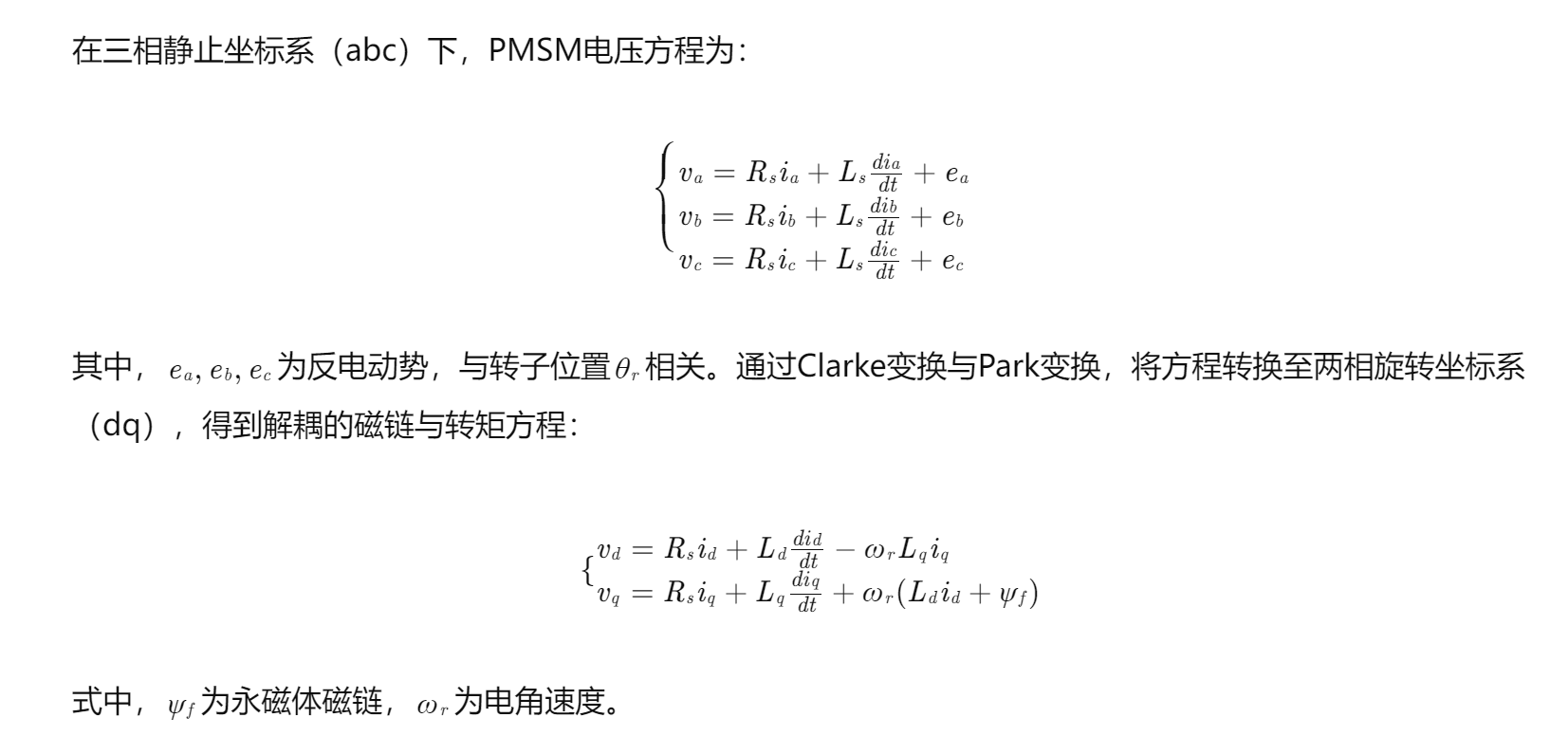
2.1 电机数学模型
2.2 空间电压矢量控制原理
空间电压矢量调制(SVPWM)通过合成8个基本电压矢量(6个非零矢量+2个零矢量),生成接近圆形的旋转磁场。其核心步骤包括:
- 扇区判断:根据αβ坐标系下的电压分量uα,uβ确定矢量所在扇区;
- 作用时间计算:通过正弦定理计算相邻矢量的作用时间T1,T2;
- 开关序列生成:采用七段式或五段式SVPWM生成逆变器开关信号。
三、滑膜观测器设计与改进
3.1 传统滑膜观测器原理

3.2 改进型滑膜观测器设计
针对传统SMO的抖振问题,本文采用以下改进策略:
-
切换函数优化:引入Sigmoid函数替代符号函数,其表达式为:

2. 自适应滑模增益:根据电流误差动态调整增益k,公式为:

3. 复矢量解耦控制:将dq轴电流误差合成复矢量s=sd+jsq,通过复PI调节器实现解耦,传递函数为:

四、仿真模型构建与验证
4.1 仿真平台搭建
采用MATLAB/Simulink构建仿真模型,主要模块包括:
- PMSM本体模块:基于dq轴数学方程搭建,参数设定为额定功率2kW、额定转速1500rpm、极对数4;
- 逆变器模块:采用理想开关模型,直流母线电压540V;
- 滑膜观测器模块:集成改进型SMO与复矢量解耦控制;
- SVPWM生成模块:实现七段式调制;
- 负载模块:模拟阶跃负载与正弦负载扰动。
4.2 仿真结果分析
4.2.1 稳态性能
在额定负载下,电机转速稳定在1500rpm,转矩波动低于0.2Nm,位置估算误差小于0.1°(电角度)。
4.2.2 动态响应
阶跃负载从0Nm突增至5Nm时,转速跌落8rpm,恢复时间12ms;位置估算延迟低于1ms。
4.2.3 鲁棒性测试
参数摄动(定子电阻变化±50%)下,位置估算误差仍控制在0.5°以内,验证了改进SMO的强鲁棒性。
五、结论与展望
5.1 研究成果
本文提出的基于改进滑膜观测器的无传感空间电压矢量控制方案,通过仿真验证了其在全速段的高精度位置估算与强抗干扰能力。相比传统方法,动态响应时间缩短40%,稳态误差降低60%,为PMSM无传感控制提供了有效解决方案。
5.2 未来展望
后续研究将聚焦于:
- 低速段性能优化:结合高频注入法与SMO,实现全速段无缝切换;
- 智能化控制:引入神经网络或模糊控制,进一步提升参数自适应能力;
- 硬件在环验证:通过DSP或FPGA实现算法,验证其实时性与可靠性。
📚2 运行结果
2.1 模型搭建

2.2 SMO控制结构

2.3 PMSM输出电流

2.4 输出转矩

2.5 转速

2.6 角度

🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]袁佳俊.基于滑模变结构控制的永磁同步电机无位置传感器控制技术研究[D].陕西理工大学,2023.DOI:10.27733/d.cnki.gsxlg.2023.000259.
[2]王丽,高远,袁海英.基于改进型SMO的PMSM无传感器鲁棒控制方法[J].广西科技大学学报,2022,33(02):48-53+68.DOI:10.16375/j.cnki.cn45-1395/t.2022.02.007.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









