



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、问题背景与意义
在机械制造、地质勘探、建筑工程等领域,常面临3D 空间中钻孔路径规划的复杂需求,例如航空航天部件的多孔加工、矿山巷道钻孔布局等。该问题的核心是在满足加工工艺、设备约束(如钻头行程、避让障碍物)和精度要求的前提下,优化钻孔顺序、路径长度及空间姿态,以提升效率、降低成本并减少设备损耗。传统启发式算法在处理高维、多约束的 3D 空间问题时易陷入局部最优,而遗传算法(Genetic Algorithm, GA)因其全局搜索能力和鲁棒性,成为解决此类复杂优化问题的有效工具。
二、遗传算法基本框架在钻孔规划中的应用
遗传算法通过模拟生物进化过程(选择、交叉、变异),在解空间中迭代搜索最优解。以下是其在 3D 钻孔规划中的关键设计要素:
(一)染色体编码
直接编码法:将钻孔顺序、空间坐标(x,y,z)及钻头姿态(如倾角、方位角)编码为染色体基因。例如,每个基因对应一个钻孔点,包含坐标向量和姿态参数。
顺序 - 参数分层编码:分离钻孔顺序(如整数排列表示加工顺序)和空间参数(实数编码表示坐标与姿态),便于交叉和变异操作分别优化不同维度。(二)适应度函数设计需综合考虑以下优化目标:
路径最短化:计算相邻钻孔点间的 3D 欧氏距离总和,或考虑钻头进给 / 退刀路径的实际长度
约束满足性:避障约束:确保钻孔路径不与工件内部结构或外部障碍物碰撞。工艺约束:如钻孔深度限制、相邻孔的加工顺序避免应力集中。设备约束:钻头旋转角度范围、进给速度限制。
加工效率:减少空行程时间、换刀次数(若涉及多类型钻头)。适应度函数示例:Fitness=w1⋅L+w2⋅V+w3⋅C1其中,L为总路径长度,V为违反约束的惩罚值,C为工艺成本;w1,w2,w3为权重系数,根据实际需求调整。
(三)遗传操作设计
- 选择算子
- 轮盘赌选择:基于适应度比例选择个体,适应度越高的染色体被选中的概率越大。
- 精英保留策略:直接保留当前代最优个体至下一代,避免最优解丢失。
- 交叉算子
- 顺序交叉(OX):适用于钻孔顺序优化,保留父代部分顺序并交叉插入剩余基因。
- 算术交叉:适用于空间参数(坐标、姿态),通过线性组合生成子代参数(如xchild=α⋅xparent1+(1−α)⋅xparent2)。
- 变异算子
- 逆转变异:随机反转染色体中某段基因的顺序,扰动钻孔顺序。
- 高斯变异:对空间参数添加高斯噪声(如Δx∼N(0,σ2)),局部搜索更优解。
(四)约束处理
罚函数法:对违反约束的个体在适应度中引入惩罚项(如上述V),迫使算法优先搜索可行解。
可行解空间限定:在交叉和变异后,通过几何运算(如碰撞检测)修正非法解,确保钻孔点位于允许区域内。
三、3D 空间特性带来的挑战与改进策略
(一)高维搜索空间
3D 问题的解空间维度显著高于 2D(如每个钻孔点需 3 个坐标 + 3 个姿态参数),易导致遗传算法收敛速度慢。
改进策略:
引入降维预处理:利用主成分分析(PCA)或空间分割(如八叉树)压缩无效维度。采用混合算法:结合局部搜索算法(如模拟退火、粒子群优化)加速局部寻优,弥补遗传算法局部搜索能力不足。
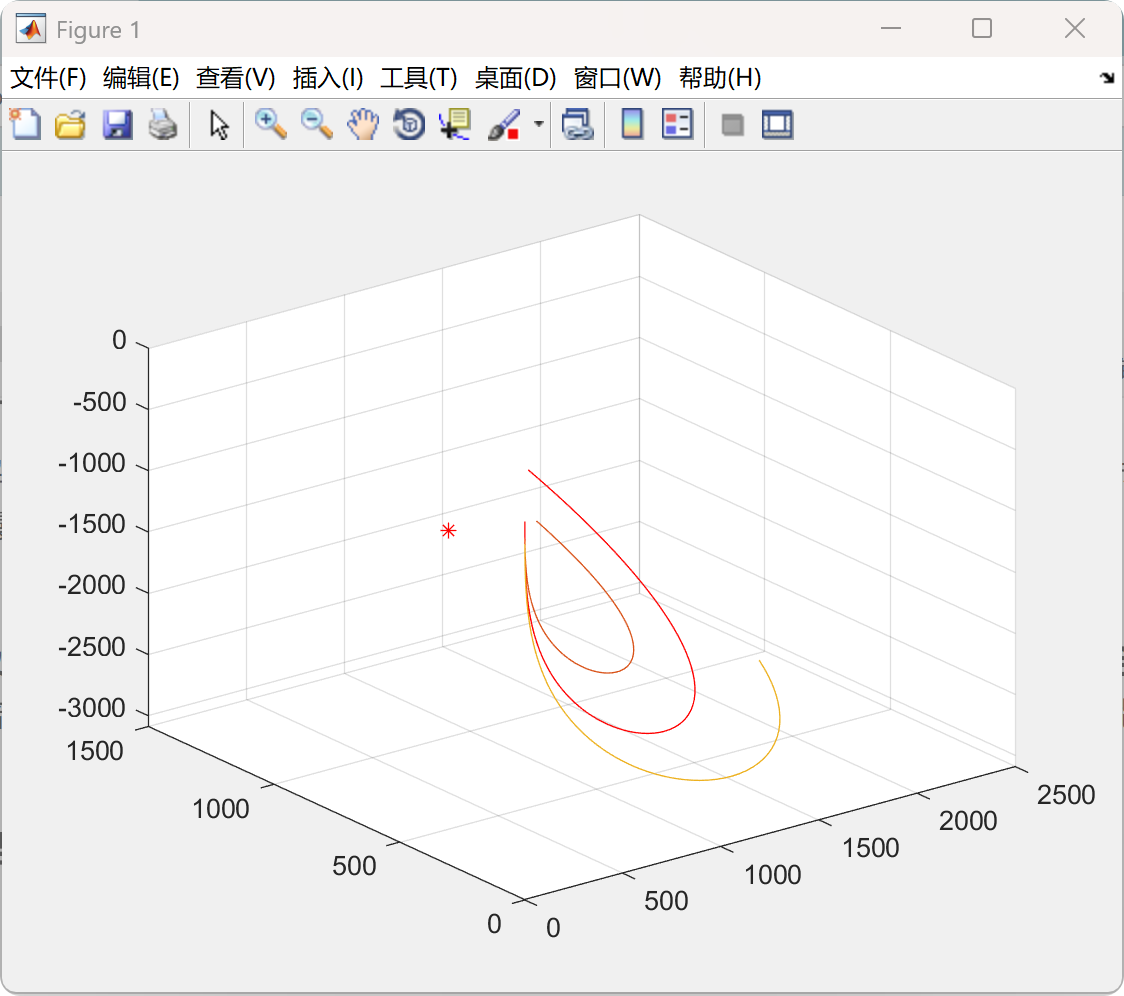
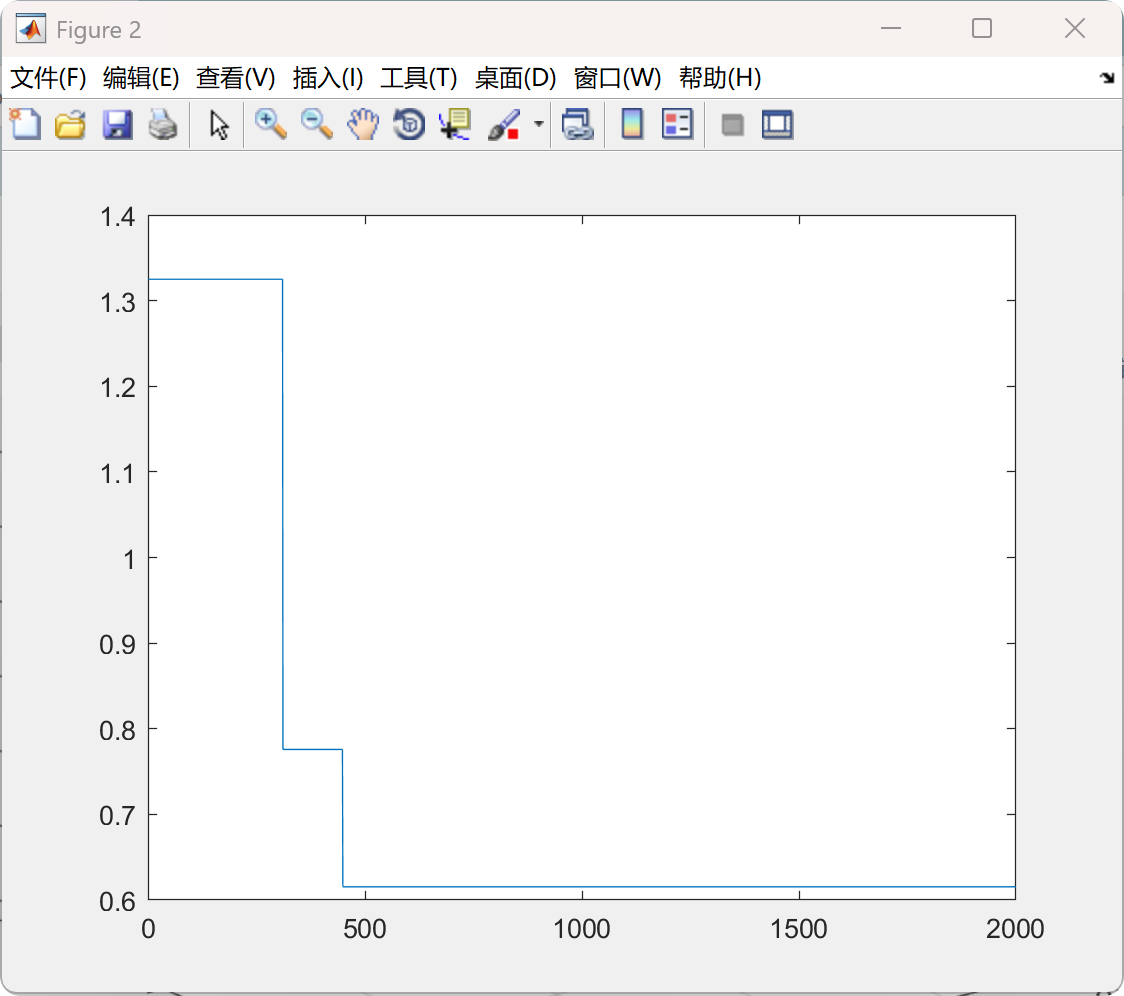
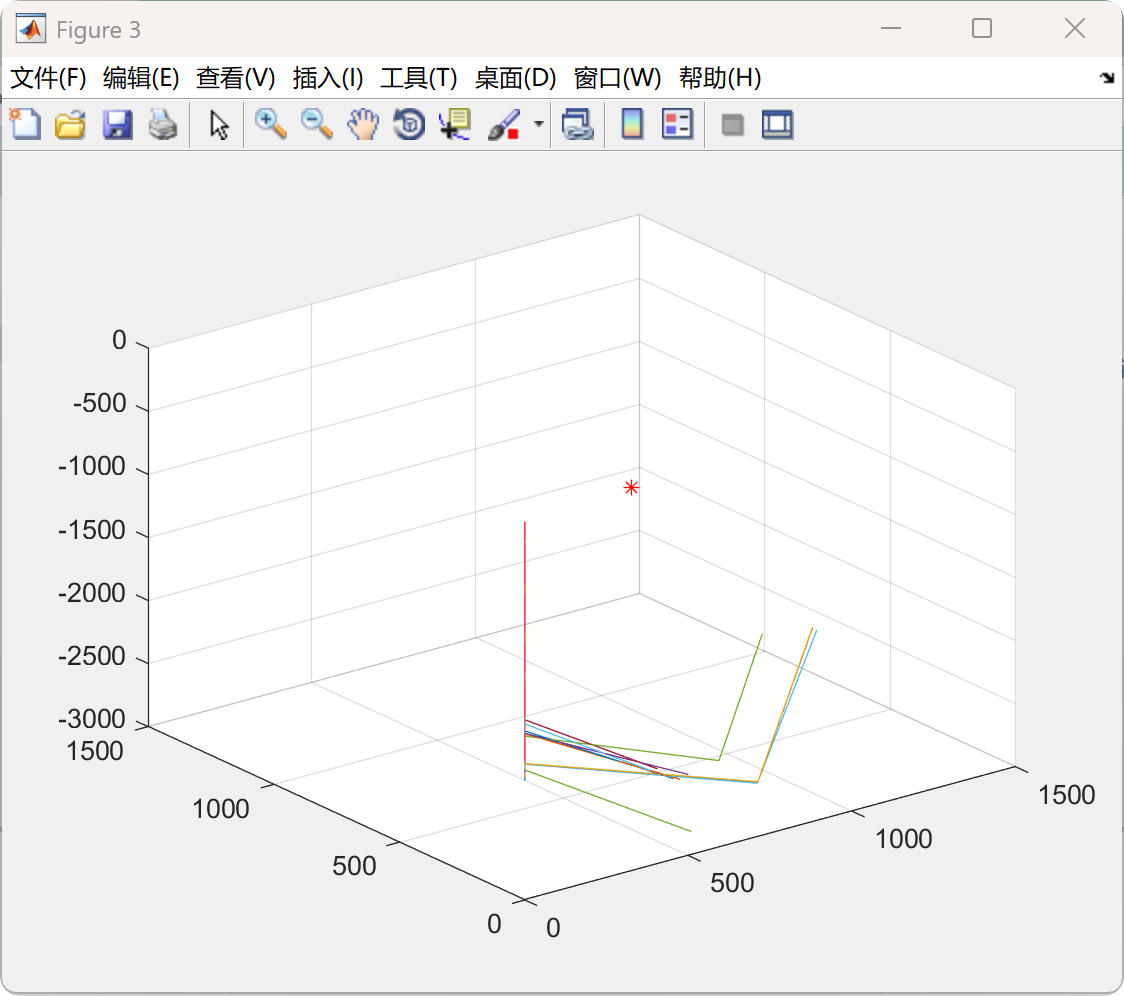
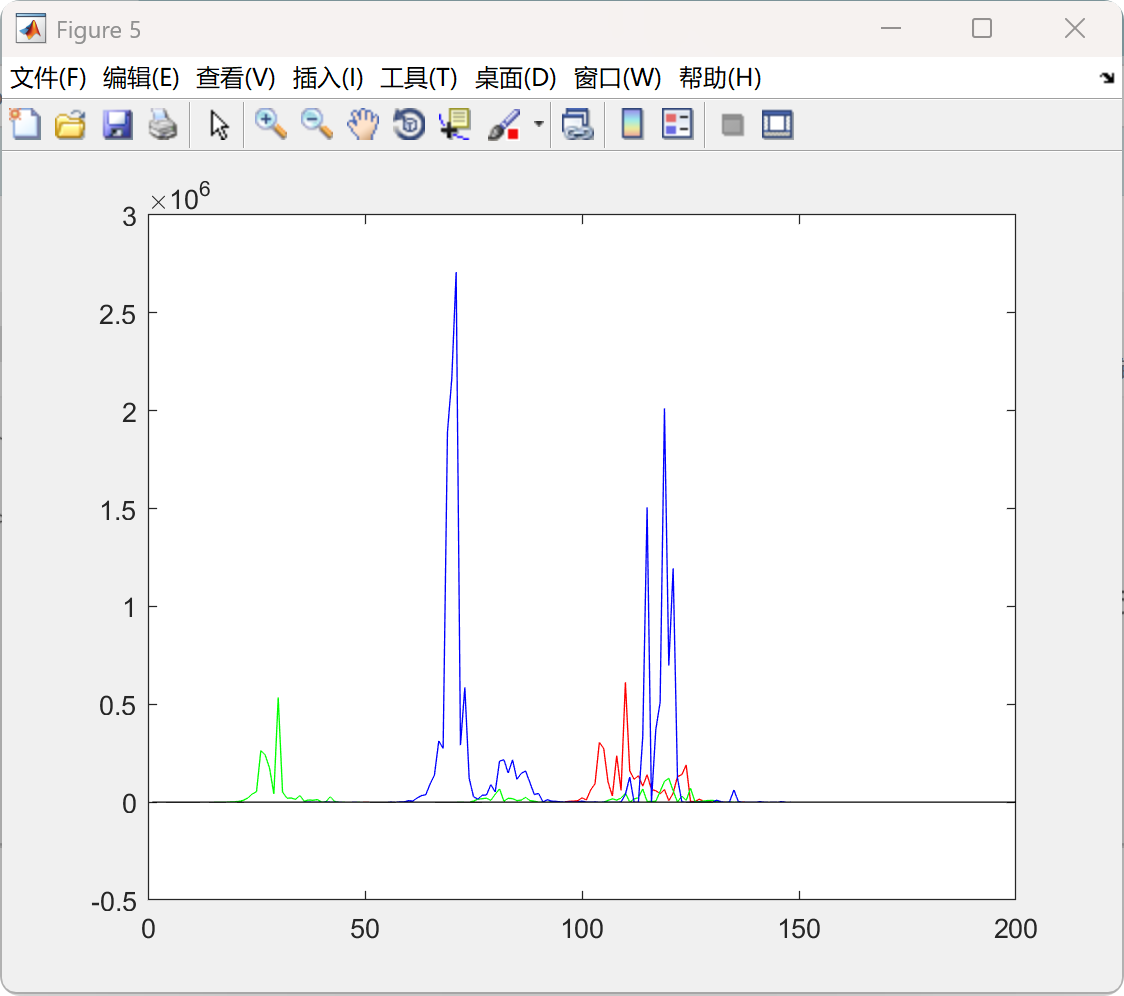
📚2 运行结果
部分代码:
clc
clear all
tic
%parameter initialize
UPPER_LIMIT=100000;
LOWER_LIMIT=-100000;
popSize=200;%population size
offspSize=1400;
n=4;
tau=1/sqrt(2*sqrt(n));
sigma=1;
%initialize population
for i=1:popSize
population(i)=Trajectory1;
population(i).sigma_lambda(1)=normrnd(0,sigma);
population(i).sigma_lambda(2)=normrnd(0,sigma);
population(i).sigma_lambda(3)=normrnd(0,sigma);
population(i).sigma_lambda(4)=normrnd(0,sigma);
%random generate initial lambda values
lambda1=randi([LOWER_LIMIT,UPPER_LIMIT])+rand;
lambda2=randi([LOWER_LIMIT,UPPER_LIMIT])+rand;
lambda3=randi([LOWER_LIMIT,UPPER_LIMIT])+rand;
lambda4=randi([0,UPPER_LIMIT])+rand;
population(i).lambda(1)=lambda1;
population(i).lambda(2)=lambda2;
population(i).lambda(3)=lambda3;
population(i).lambda(4)=lambda4;
%calculate trajectory by current lambda and C, and fitness
[population(i).alpha population(i).theta population(i).x population(i).y population(i).z population(i).fitness]=trajGenerate3(lambda1,lambda2,lambda3,lambda4);
end
%evolution begins
Gen=1;
figure
best=population(1);
while(Gen<=200)
%print generation and best fitness
fprintf(['Generation: %i \n',...
'Best fitness: %f \n',...
],Gen,best.fitness);
fprintf('-------------------- \n');
%generate offsprings
count=0;
while(count<offspSize)
%Parent select and crossover
p1Index=randi([1,popSize]);
p2Index=randi([1,popSize]);
parent1=population(p1Index);
parent2=population(p2Index);
offspring1=parent1;
offspring2=parent2;
crossover_point1=randi([1,n]);
crossover_point2=randi([1,n]);
for i=1:n
if(i<=crossover_point1)
offspring1.lambda(i)=parent1.lambda(i);
offspring2.lambda(i)=parent2.lambda(i);
else
offspring1.lambda(i)=parent2.lambda(i);
offspring2.lambda(i)=parent1.lambda(i);
end
if(i<=crossover_point2)
offspring1.sigma_lambda(i)=parent1.sigma_lambda(i);
offspring2.sigma_lambda(i)=parent2.sigma_lambda(i);
else
offspring1.sigma_lambda(i)=parent2.sigma_lambda(i);
offspring2.sigma_lambda(i)=parent1.sigma_lambda(i);
end
end
%mutate offsprings sigma first, then lambda values
for i=1:n
offspring1.sigma_lambda(i)=offspring1.sigma_lambda(i)*exp(tau*normrnd(0,sigma));
offspring1.lambda(i)=offspring1.lambda(i)+offspring1.sigma_lambda(i)*normrnd(0,sigma);
offspring2.sigma_lambda(i)=offspring2.sigma_lambda(i)*exp(tau*normrnd(0,sigma));
offspring2.lambda(i)=offspring2.lambda(i)+offspring2.sigma_lambda(i)*normrnd(0,sigma);
end
%evaluate offspring fitness and trajectory
[offspring1.alpha offspring1.theta offspring1.x offspring1.y offspring1.z offspring1.fitness]=trajGenerate3(offspring1.lambda(1),offspring1.lambda(2),offspring1.lambda(3),offspring1.lambda(4));
[offspring2.alpha offspring2.theta offspring2.x offspring2.y offspring2.z offspring2.fitness]=trajGenerate3(offspring2.lambda(1),offspring2.lambda(2),offspring2.lambda(3),offspring2.lambda(4));
offsprings(count+1)=offspring1;
offsprings(count+2)=offspring2;
count=count+2;
end
%survival selection (u+lambda) with replacement
% newpopulation=[population offsprings];
% [~,index]=sort([newpopulation.fitness]);
% temp=newpopulation(index);
% population=temp(1:popSize);
[~,index]=sort([offsprings.fitness]);
temp=offsprings(index);
if(temp(1).fitness<best.fitness)
best=temp(1);
end
population=temp(1:popSize);
%store values
bestFitness(Gen)=population(1).fitness;
sigmas(Gen,:)=population(1).sigma_lambda;
%next generation and plot
Gen=Gen+1;
if(mod(Gen,10)==0)
plot3(population(1).x,population(1).y,population(1).z)
hold on
end
end
toc
plot3(population(1).x,population(1).y,population(1).z,'r')
hold on
plot3(1400,1400,-2000,'r*');
grid on
figure
plot(bestFitness)
figure
plot(sigmas(:,1),'r')
hold on
plot(sigmas(:,2),'g')
hold on
plot(sigmas(:,3),'b')
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]张亦弛.基于机器学习的水电工程地质三维精细建模与混合现实可视化研究[D].天津大学,2020.DOI:10.27356/d.cnki.gtjdu.2020.003006.
[2]廖林雅茜.生成式AI大模型伦理风险治理框架与多模态对齐优化路径研究[C]//《中国招标》期刊有限公司.新质生产力驱动第二产业发展与招标采购创新论坛论文集(二).江西工商职业技术学院;,2025:308-309.DOI:10.26914/c.cnkihy.2025.011950.
🌈4 Matlab代码实现


















 859
859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









