



 本文介绍了如何使用MATLAB编写基于无人机物理特性的动力学模型,探讨了三维路径规划算法(如A*、Dijkstra和RRT)的应用,以及如何在MATLAB中进行碰撞检测和路径优化。通过示例代码展示了如何处理飞行高度限制和路径调整的过程。
本文介绍了如何使用MATLAB编写基于无人机物理特性的动力学模型,探讨了三维路径规划算法(如A*、Dijkstra和RRT)的应用,以及如何在MATLAB中进行碰撞检测和路径优化。通过示例代码展示了如何处理飞行高度限制和路径调整的过程。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
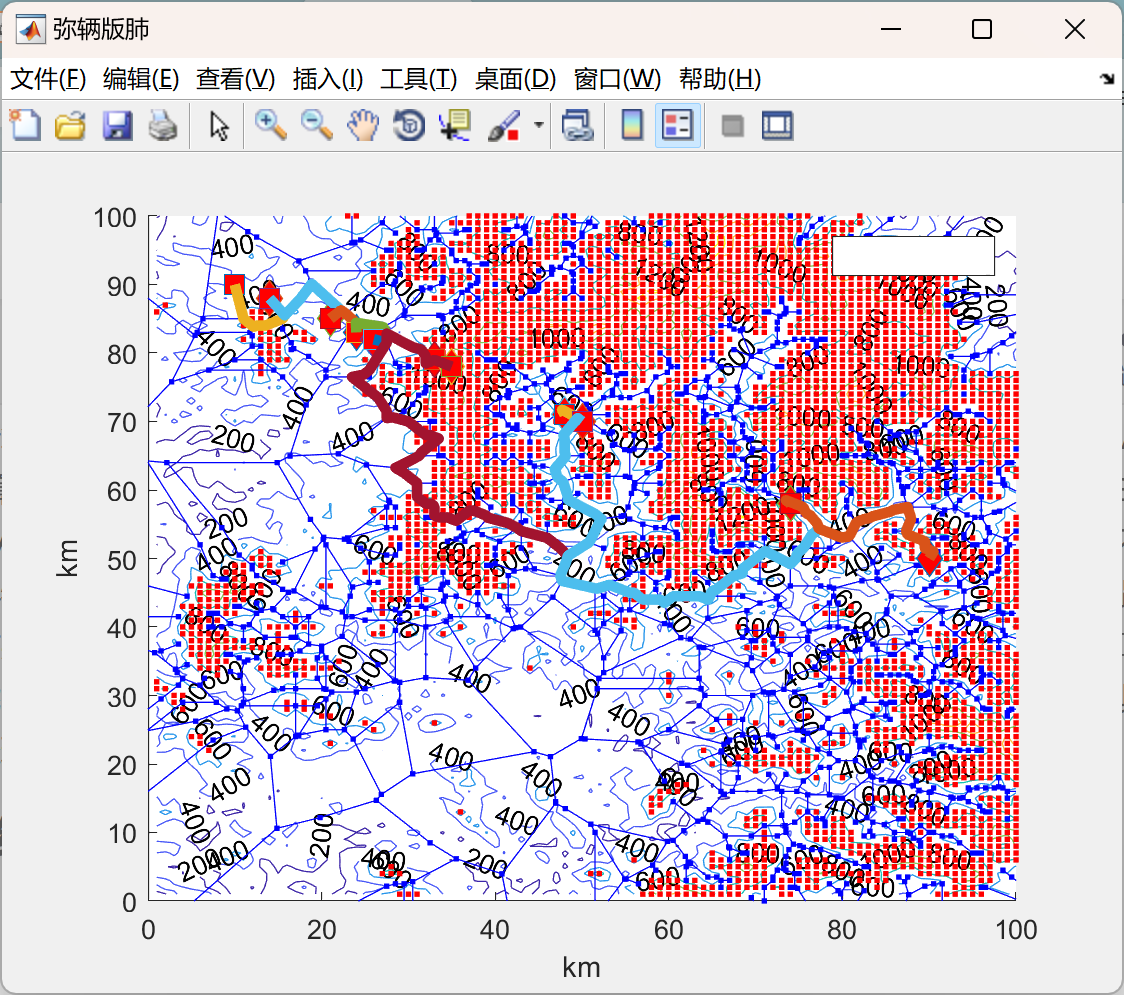
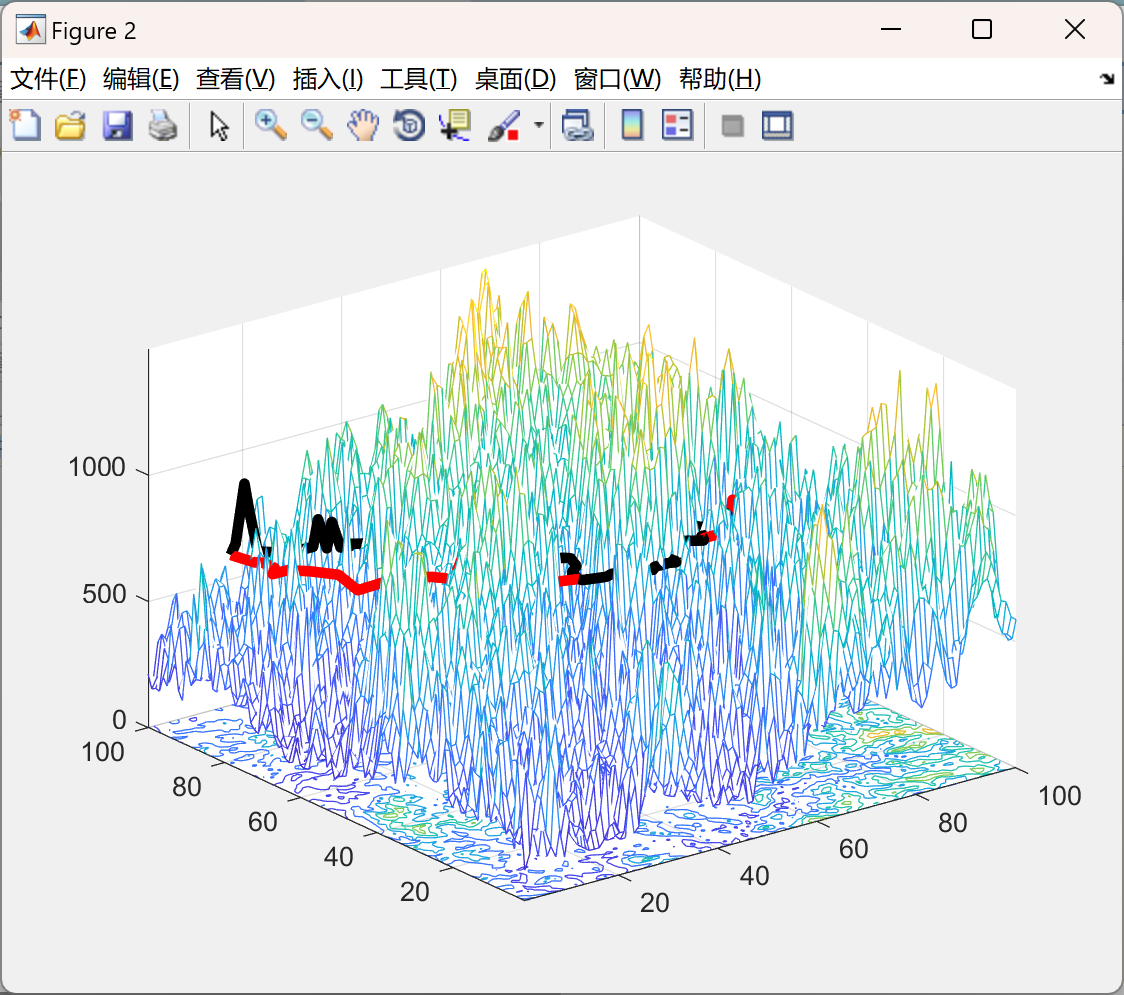
基于无人机的物理特性(如质量、速度、加速度等),使用MATLAB编写无人机的动力学模型。这可以帮助计算无人机的位姿、速度和加速度等关键参数。选择适合三维路径规划的算法,如A*算法、Dijkstra算法、RRT(Rapidly-exploring Random Tree)算法等。这些算法可以在MATLAB中实现或利用MATLAB的函数库进行调用。在MATLAB中进行碰撞检测,以确保搜索得到的路径不与环境中的障碍物相交。如果发现碰撞,需要对路径进行优化,例如通过路径平滑或最小化路径距离来改进路径结果。基于MATLAB的无人机3D路径规划算法利用MATLAB提供的丰富的数值计算和图形绘制功能,帮助实现高效、准确的路径规划和路径跟踪。同时,MATLAB也提供了许多工具和函数,用于处理三维空间中的环境建模、路径搜索和碰撞检测等任务。
📚2 运行结果
主函数部分代码:
clear;
clc;
cla;
[Z, ref] = dted('n37.dt0');
N_s = 100;
x_s = linspace(1, N_s,N_s);
y_s = linspace(1, N_s,N_s);
x_2d_s = repmat(x_s,N_s,1);
y_2d_s = repmat(y_s',1,N_s);
x_1d_s = zeros(1,N_s*N_s);
y_1d_s = zeros(1,N_s*N_s);
z_1d_s = zeros(1,N_s*N_s);
z_2d_s = zeros(N_s,N_s);
cnt = 1;
for i = 1: N_s %1磊肺 父靛绰何盒
for j = 1: N_s
x_1d_s(cnt) = x_2d_s(i,j);
y_1d_s(cnt) = y_2d_s(i,j);
z_1d_s(cnt) = Z(i,j);
z_2d_s(i,j) = Z(i,j);
cnt = cnt+1;
end
end
flight_height = 700;% 厚青 臭捞焊促 角力 臭捞啊 臭酒 款亲捞 阂啊瓷茄 镑(厘局拱)
% 厘局拱狼 困摹绰 xn_new, yn_new, z_new 俊 历厘登绢乐澜
i_site = find(z_1d_s > flight_height); %臭捞 蔼林绰何盒 角力肺 荤侩瞪 农扁 魄窜
xn_new = zeros(1,length(i_site));
yn_new = zeros(1,length(i_site));
z_new = zeros(1,length(i_site));
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[[1]崔衡,马宗方,宋琳等.基于连续顶点分区的3D打印混凝土路径规划算法[J/OL].工程设计学报:1-9[2024-03-20].http://kns.cnki.net/kcms/detail/33.1288.th.20240306.0751.010.html.

















 574
574

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









