




 本文介绍二极管的基本概念及其伏安特性,包括开启电压、反向饱和电流等,并深入探讨稳压二极管的工作原理及关键参数。
本文介绍二极管的基本概念及其伏安特性,包括开启电压、反向饱和电流等,并深入探讨稳压二极管的工作原理及关键参数。
一、二极管
上一篇博客介绍了有关半导体相关知识:模电——半导体
将PN结封装,引出两个电机,就构成二极管。

二、二极管伏安特性
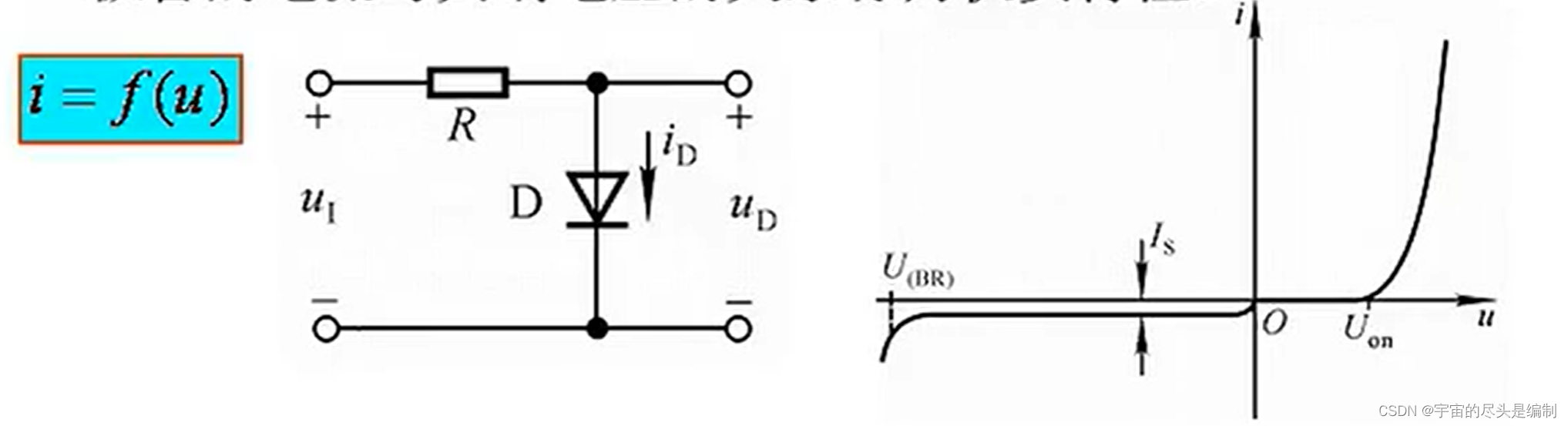
从伏安特性曲线可以看出,二极管两侧在施加正向电压的时候,也不是一开始就导通,而是在电压一定的时候才导通,因为此时,多数载流子的扩散运动要强于少数载流子的漂移运动,才能实现导通。但是添加反向电压时,二极管处于截止状态,也有微小电流,是因为反向电压抑制了多数载流子的扩散运动,而有利于少数载流子的漂移运动,而由于少数载流子数量较少,所以电流也非常小,但不是完全截止。
开启电压:使得二极管导通的电压称为开启电压。不同材料二极管开启电压各不同的。
反向饱和电流:全部的少数载流子都参数了漂移运动,当反向电压再增大时,电流就不在变化了。不同材料的反向饱和电流是不同的。
反向击穿电压:当反向电压达到一定程度时,就会破坏PN结结构,使得原子核失去对外层电子的束缚,从而出现反向击穿。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2563
2563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









