



前言
要学习图的广度优先遍历和深度优先遍历算法,首先要了解图的基本概念和图的存储方式。
一、图的基本概念
先来简单回顾一下图的基本概念,用通俗易懂的话来说。
1.图的分类
首先,图这种数据结构,顶点和边分别用V和E表示(无向图的边叫边,有向图的边可以叫边,也可以叫弧--稍微区分一下)。图可以分为有向图和无向图(边是有方向的叫有向图),还可以分为简单图和多重图(多重图是有重复的边,而且存在自己到自己的边,因此我们下面的研究对象是简单图)。
2.顶点的度,入度和出度
无向图的度是指,与当前顶点相连的全部边的个数。有向图的度 = 出度 + 入度。出度是从当前顶点指向其他顶点的边的个数,入度就是从其他顶点指向当前顶点的边的个数。顺便提一句,无向图的全部度之和等于边数的2倍,因为一条边连接两个顶点。有向图的边数 = 全部顶点的入度之和+全部顶点的出度之和,因为一条弧,连接两个顶点。
3.完全图和子图
完全图是什么?无向图的完全图,那就是任意两个顶点之间都有连线。如果是有向图的完全图,那就是任意两个顶点之间都有两条弧,一条从A指向B,一条从B指向A。
多说一句,有向完全图的边个数是:V(V-1) 。无向完全图的边数是:V(V-1)/2 。
子图是什么?子图就是从原来的图中取出来一部分边和顶点,然后形成图。注意了,子图中取出的顶点和边必须严格按照原图的连接关系(即拓扑结构)来保留,但可以选择保留部分边。
子图下面还有个生成子图的概念,生成子图就是包含原图的全部顶点的子图。
4.路径和回路
路径就是从一个顶点到另一个顶点之间经过的顶点序列(不同教材的定义不太一样,但大概意思就是这样)。回路就是从一个顶点出发,经过几个顶点然后回到自己。
距离,就是从一个顶点到另一个顶点的最短路径长度。
简单路径,就是从一个顶点到另一个顶点,中间不经过重复的顶点。
简单回路,就是从一个顶点出发经其他顶点回到自己的过程中不经过重复顶点。
5.连通和强连通
连通是针对无向图的,就是任意两个顶点之间都有路径(注意,意思就是从一个顶点到另一个顶点有路径就行,区别于完全图的任意两个顶点之间有连线)。连通分量,如果无向图里面有好几个部分,各个部分单独连通,那么这些各自单独连通的部分就是各个连通分量。
强连通是针对有向图的,就是任意两个顶点直接都有路径,(和连通不一样的地方是,强连通是从A到B有路径,从B到A也要有路径,也就是要双向奔赴才行)。强连通分量和连通分量差不多,各个部分单独强连通,那么这些各自单独强连通的部分就是各个连通分量。
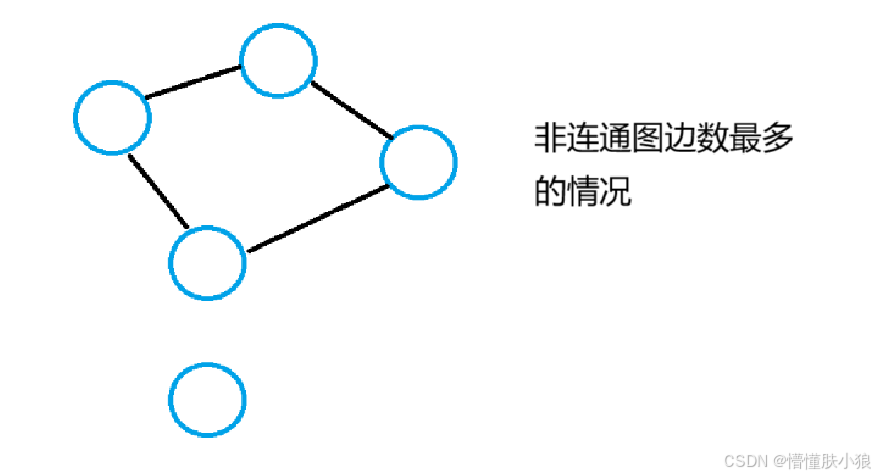
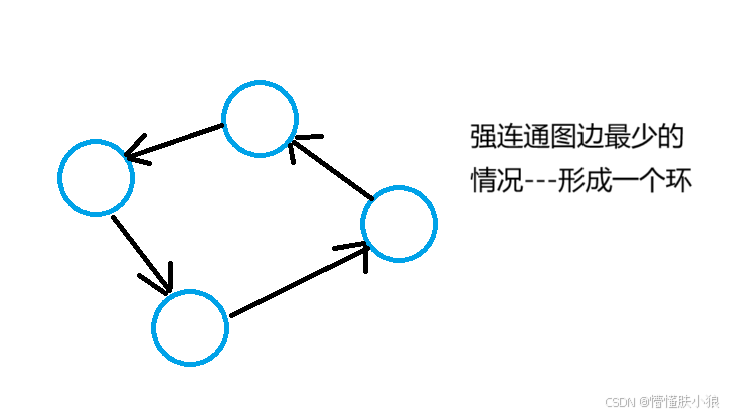
多说一句,连通图,至少要有V-1条边,一个非连通图最多有(V-1)(V-2)/2 条边(因为假设有五个顶点要构成一个连通图,先让四个顶点变为完全图,用组合公式C(下面是V-1,上面是2)计算边,然后剩下一个顶点和其他不连通,那整体就不连通。)。强连通图最少有V条边,形成一个环。
6.生成树和有向树
生成树是啥?其实就是包含一个连通图中的全部顶点的极小连通子图。首先包含全部顶点,然后是连通的,而且极小连通也就是保证连通但是边的数目最少。我们前边已经提到连通图的边数最少就是V-1,所以生成树的边就是V-1个。
生成森林?就是一个非连通图里面的,好几个连通分量,这些连通分量每个都形成一个生成树,这些生成树就构成了一个生成森林。
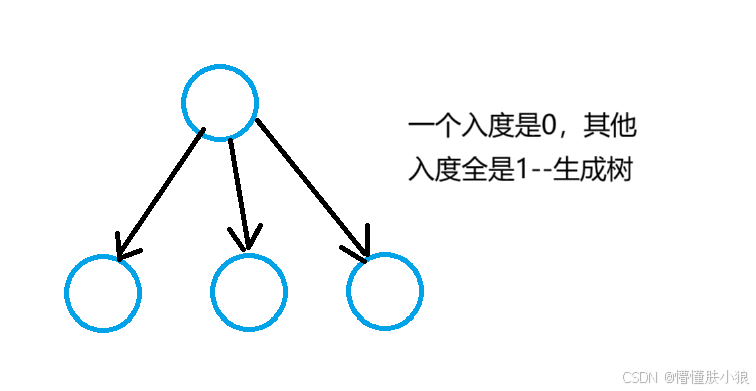
有向树:如果一个有向图,一个顶点的入度是0,其他顶点的入度都是1,那就叫有向树。
二、图的存储方式
1.邻接矩阵存储
简单讲,就是拿一个一维数组存储顶点。拿一个二维数组来存储边。
代码定义如下:(用C语言,掺杂一点C++。下面同)
typedef struct {
//顶点
int vertex[MaxVerNum];
//边
int edge[MaxVerNum][MaxVerNum];
//当前的顶点个数和边个数
int verNUm,edgeNum;
}MGraph;2.邻接表存储
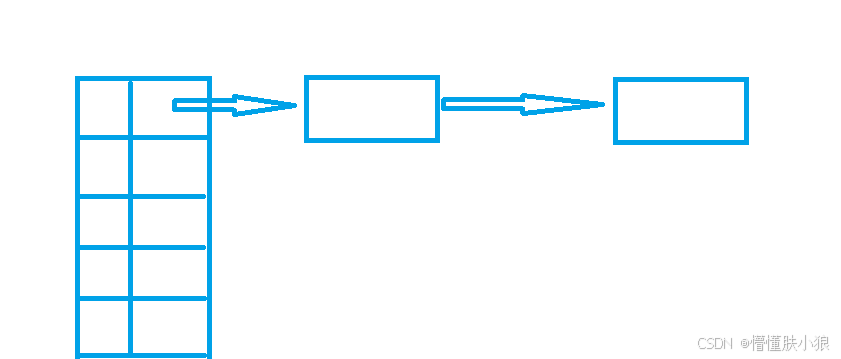
简单讲就是,一个结构体数组存顶点,然后数组中的每个顶点都有一条链表,链表就是指向其他顶点的边。
代码定义如下:
// 边表结点
typedef struct ArcNode {
int adjvex; // 该弧所指向的顶点的位置
struct ArcNode *nextarc; // 指向下一条弧的指针
} ArcNode;
// 顶点表结点
typedef struct VNode {
int data; // 顶点信息
ArcNode *firstarc; // 指向第一条依附该顶点的弧的指针
} VNode, AdjList[MAX_VERTEX_NUM];
// 图的邻接表表示
typedef struct {
AdjList vertices;
int vexnum, arcnum; // 图的当前顶点数和弧数
} ALGraph;3.十字链表存储
只能存储有向图。
4.邻接多重表存储
只能存储无向图。等后期有空了再补充吧。

三、图的遍历
说了半天废话,终于到正题了。精神!(((o(*゚▽゚*)o)))♡
下面的代码是以邻接矩阵来写的,分析是以邻接矩阵和邻接表来搞的。
1.广度优先遍历BFS
类似于树的层序遍历,但是和树的层序遍历的区别在于,图的广度优先遍历可能会让节点去重复访问一个已经访问过的节点。
因此,设置一个bool类型的标记数组,以索引来表示结点,然后初始化为false,如果结点被访问过了就设置为true。
同时,BFS要使用一个辅助队列,遍历顺序,例如下图:
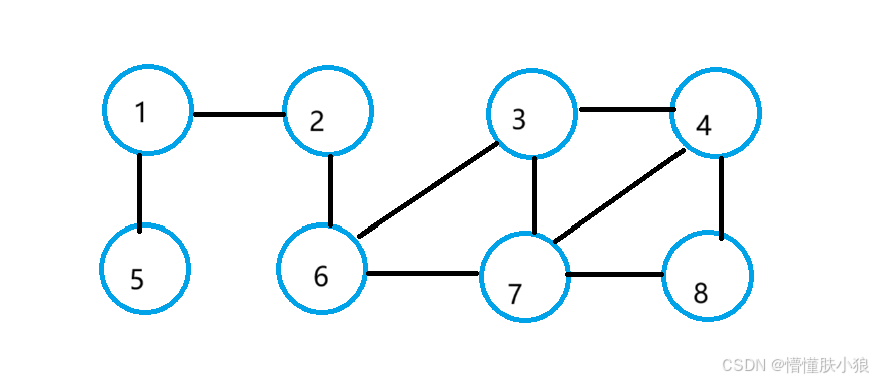
其进队的次序是:
1 - 2 - 5 - 6 - 3 - 7 - 4 - 8。当前顶点出队,就会把其相邻的顶点全部入度。
注意:如果是非连通图,无向图,有几个连通分量,那就要循环几次。如果是有向图,还要看情况访问几次。
空间复杂度:设置辅助队列占用空间,最差情况一次全部进队,O(V)
时间复杂度:邻接矩阵法O(V²),邻接表法O(V+E)
2.深度优先遍历DFS
DFS类似于树的先根遍历。同样的设置标志数组,防止重复访问。
上图的DFS顺序:假设从1号开始,1-2-6-3-4-7-8-5。从1号开始,深度一直到2,3,4,5,6,7,8,然后这些访问完了之后,栈开始往回,一直到1号,然后找到5号。
如果是非连通图,无向图,有几个连通分量,那就要循环几次。如果是有向图,还要看情况访问几次。
空间复杂度:使用递归算法,栈的深度最大是一次全部进栈,也就是O(V)
时间复杂度:邻接矩阵法O(V²),邻接表法O(V+E)
3.BFS和DFS代码(邻接矩阵实现)
如图,先建立一个图如上所示,然后广度优先,深度优先分别遍历。
可以手动模拟一下以各个点为起点的遍历顺序和代码是否一致。
#include <iostream>
/**
* 图的邻接矩阵存储方式
* 图的基本操作,包含 查找其第一个相邻结点,查找下一个相邻结点
* BFS 和 DFS
*/
#define MaxVerNum 8
#define INFINITY 1000
// 邻接矩阵存储结构
typedef struct {
//顶点
int vertex[MaxVerNum];
//边
int edge[MaxVerNum][MaxVerNum];
//当前的顶点个数和边个数
int verNUm,edgeNum;
}MGraph;
//邻接矩阵创建一个图
void createMGraph(MGraph *&MG){
int a[8] = {1,2,3,4,5,6,7,8};
//将上面数组中的值,建立一个图
//先设置顶点
for(int i=0;i<MaxVerNum;i++){
MG->vertex[i] = a[i];
MG->verNUm++;
}
//初始化全部边的权值为INFINITY
for(int i=0;i<MaxVerNum;i++){
for(int j=0;j<MaxVerNum;j++){
MG->edge[i][j] = INFINITY;
MG->edgeNum++;
}
}
//设置相连顶点的边,1可以换位其他值表示权值
MG->edge[0][1] = 1;MG->edge[1][0] = 1;
MG->edge[7][6] = 1;MG->edge[6][7] = 1;
MG->edge[0][4] = 1;MG->edge[4][0] = 1;
MG->edge[1][5] = 1;MG->edge[5][1] = 1;
MG->edge[5][2] = 1;MG->edge[2][5] = 1;
MG->edge[2][6] = 1;MG->edge[6][2] = 1;
MG->edge[5][6] = 1;MG->edge[6][5] = 1;
MG->edge[2][3] = 1;MG->edge[3][2] = 1;
MG->edge[3][6] = 1;MG->edge[6][3] = 1;
MG->edge[7][3] = 1;MG->edge[3][7] = 1;
}
//广度优先遍历
//设置队列
typedef struct Queue{
int *array;
int front,rear;
}Queue;
//入队,出队操作
void EnQueue(Queue *&q,int value){
if(q->rear == MaxVerNum-1){
return ;
}
q->array[q->rear++] = value;
}
int DeQueue(Queue *&q){
if(q->rear == q->front){
return -1;
}
int value = q->array[q->front++];
return value;
}
void visit(int vertex){
printf("%2d",vertex);
}
//查询某个值的索引
int search(MGraph *MG,int value){
for(int i=0;i<MaxVerNum;i++){
if(MG->vertex[i] == value){
return i;
}
}
return -1;
}
//找到当前节点的第一个相连结点
int firstNeighbor(MGraph *MG,int vertex){
//找不到返回-1
int vertexReturn = -1;
for(int i=0;i<MaxVerNum;i++){
if(MG->edge[vertex][i]!=INFINITY){
vertexReturn = i;
break;
}
}
return vertexReturn;
}
//找到与当前节点相连的第一个节点除外的下一个结点,vertex1是vertex0的一个邻接点,
//返回除vertex1外的下一个邻接点号
int nextNeighbor(MGraph *MG, int vertex0, int vertex1) {
int vertexReturn = -1;
for(int i=0;i<MaxVerNum;i++){
if(MG->edge[vertex0][i]!=INFINITY && i>vertex1){
vertexReturn = i;
break;
}
}
return vertexReturn;
}
//vertexIndex 是索引,比如从第一个元素开始,那么传来的就是0
void BFS(MGraph *MG,int vertexIndex,bool verFlag[]){
//初始化队列
Queue *q = (Queue*) calloc(1,sizeof(Queue));
q->array = (int *) calloc(MaxVerNum,sizeof(int));
//当前节点入队,比如当前是以1开始的
visit(MG->vertex[vertexIndex]);
verFlag[vertexIndex] = true;
EnQueue(q,MG->vertex[vertexIndex]);
//当队列不为空
while(q->rear != q->front){
//这里由于建立的图特殊,出队元素减一就是他的索引,如果不是,就要查询这个顶点的索引
int key = DeQueue(q);
//遍历全部当前节点相邻的结点
for(int w=firstNeighbor(MG,key-1);w>=0;w= nextNeighbor(MG, key-1, w)){
if(!verFlag[w]){
EnQueue(q,MG->vertex[w]);
visit(MG->vertex[w]);
verFlag[w] = true;
}
}
}
}
//设置标志数组,防止多次访问同一个节点。循环访问为了防止非连通图
void BFS_Traverse(MGraph *MG){
bool verFlag[MaxVerNum];
//注意,这里的0表示图中的1
for(int i=0;i<MaxVerNum;i++){
verFlag[i] = false;
}
printf("BFS--------!!!\n");
for(int i=0;i<MaxVerNum;i++){
if(!verFlag[i]){
BFS(MG,i,verFlag);
}
}
printf("\n");
}
//图的深度递归遍历(index表示从第几个元素开始遍历,index是该元素的索引位置)
void DFS(MGraph *MG,int index,bool verFlag[]){
//先访问当前节点
visit(MG->vertex[index]);
verFlag[index] = true;
for(int w=firstNeighbor(MG,index);w>=0;w=nextNeighbor(MG,index,w)){
if(!verFlag[w]){
DFS(MG,w,verFlag);
}
}
}
void DFS_Traverse(MGraph *MG){
bool verFlag[MaxVerNum];
//注意,这里的0表示图中的1
for(int i=0;i<MaxVerNum;i++){
verFlag[i] = false;
}
printf("DFS--------!!!\n");
for(int i=0;i<MaxVerNum;i++){
if(!verFlag[i]){
DFS(MG,i,verFlag);
}
}
printf("\n");
}
int main() {
MGraph *MG = (MGraph*) calloc(1,sizeof(MGraph));
createMGraph(MG);
BFS_Traverse(MG);
DFS_Traverse(MG);
return 0;
}总结
以上就是今天要讲的内容,本文简单介绍了图的概念,存储,遍历方法,还有许多补全的余地,后续有空了慢慢补吧。

















 425
425

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









