




1、 简答题
简述瀑布模型、增量模型、螺旋模型(含原型方法)的优缺点。
瀑布模型的优点仍然是可以保证整个软件产品较高的质量,保证缺陷能够提前的被发现和解决.采用瀑布模型可以保证系统在整体上的充分把握,使系统具备良好的扩展性和可维护性。但对于前期需求不明确,而又很难短时间明确清楚的项目则很难很好的利用瀑布模型。另外对于中小型的项目,需求设计和开发人员往往在项目开始后就会全部投入到项目中,而不是分阶段投入,因此采用瀑布模型会导致项目人力资源过多的闲置的情况,这也是必须要考虑的问题。
采用增量模型的有点事人员分配灵活,刚开始不用投入大量人力资源,如果核心产品很受欢迎则可增加人力实现下一个增量;可先发布部分功能给客户,对客户起到镇静剂的作用。但并行开发可能遇到不能集成的风险,软件必须具备开放式的体系结构;增量模型的灵活性可以使其适应变化的能力大大优于瀑布模型,但也很容易退化为边做边改模型,从而使得软件过程的控制失去整体性。
螺旋模型实现了随着项目成本投入不断增加,风险逐渐减小.以帮我我们加强项目的管理和跟踪,在每次迭代结束后都需要对产出物进行评估和验证,当发现无法继续进行下去时可以及早的终止项目。而复杂的地方在于尽责,专心和知识渊博的管理。因为对于每一次迭代我们要制定出清晰的目标,分析出相关的关键风险和计划中可以验证和测试的交付物并不是一件容易的事。
简述UP 的三大特点,其中哪些内容体现了用户驱动的开发,哪些内容体现风险驱动的开发?
统一过程(UP)的基本特征是用用例驱动,以架构为中心的,受控的迭代式的增量开发。
增量式开发过程体现了用户驱动的开发。
迭代对于最早给出的架构的逐步精化体现了风险驱动的开发。
UP 四个阶段的划分准则是什么?关键的里程碑是什么?
1.先启阶段(inception):该阶段的主要目的是建立项目的范围和版本,确定项目目标的可行性和稳定性,结交结果包括需求和用例。
2.精化阶段(elaboration):该阶段的目的是对问题域进行分析,建立系统需求和架构,确定实现的可行性和稳定性,提交结果包括系统架构,问题领域、修改后的需求及项目开发计划等相关文档
3.构建阶段(construction):增量式开发可以交付给用户的软件产品
4.提交阶段(transition):目的是将软件产品交付给用户
IT 项目管理中,“工期、质量、范围/内容” 三个元素中,在合同固定条件下,为什么说“范围/内容”是项目团队是易于控制的
工期是受合同约束的,而质量受到多方面影响。范围内容则是由开发团队制定,控制开发流程的。
为什么说,UP 为企业按固定节奏生产、固定周期发布软件产品提供了依据?
RUP 把整个软件开发生命周期分为多个循环,每个循环由四个阶段组成,每个阶段完成确定的任务,结束前有一个里程碑评估本阶段的工作。
2、项目管理使用
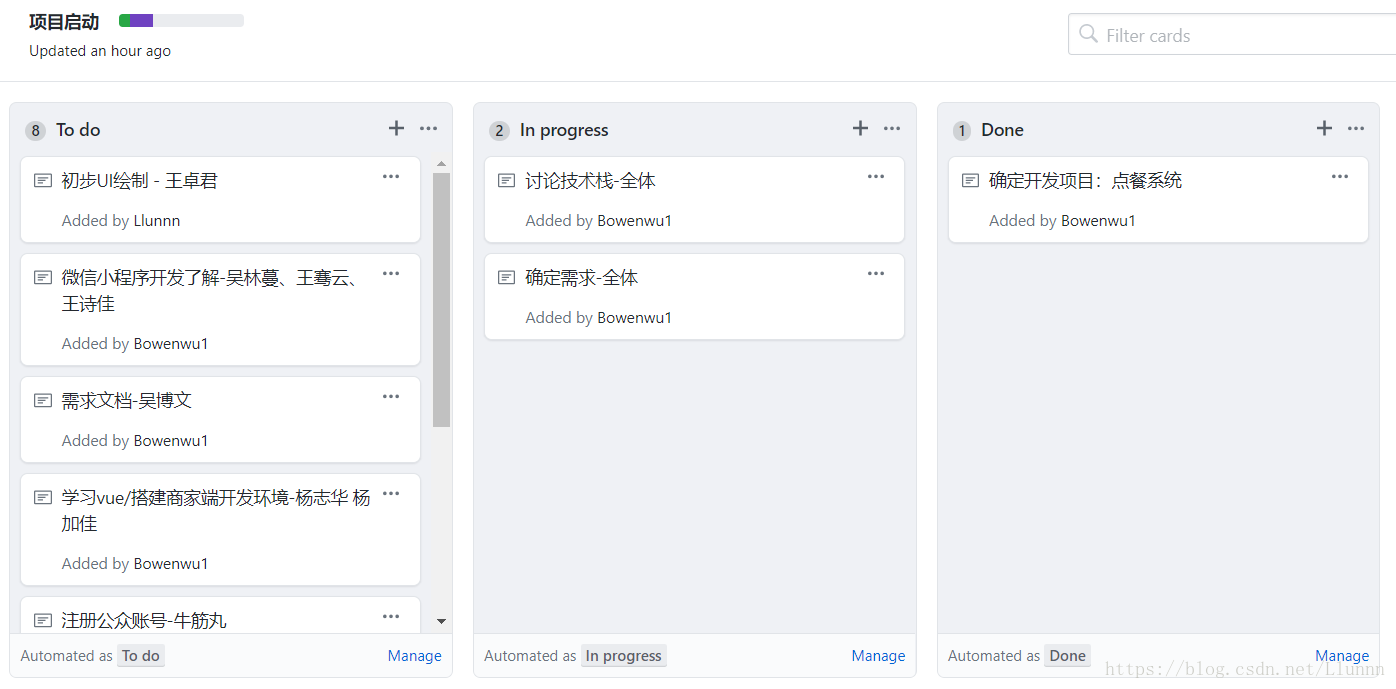
使用截图工具(png格式输出),展现你团队的任务 Kanban,请注意以下要求
每个人的任务是明确的。即一周后可以看到具体成果
每个人的任务是1-2项。
至少包含一个团队活动任务

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









