




 本文介绍了终端的发展,从物理机器到软件工具。最早的终端是物理设备,通过线缆连主机,还有特殊的控制台。Linux命令行窗口是终端模拟器,操作系统启动默认有7个虚拟终端,可通过快捷键切换,全屏终端界面由内核提供,称虚拟控制台,常用的称终端窗口。
本文介绍了终端的发展,从物理机器到软件工具。最早的终端是物理设备,通过线缆连主机,还有特殊的控制台。Linux命令行窗口是终端模拟器,操作系统启动默认有7个虚拟终端,可通过快捷键切换,全屏终端界面由内核提供,称虚拟控制台,常用的称终端窗口。
我们每天都用终端,终端中能玩儿俄罗斯方块,甚至能显示高清的图片,从上个实际的古董硬件发展到先到的软件工具。终端已经成为全球软件工程师离不开的软件之一。
1 历史:
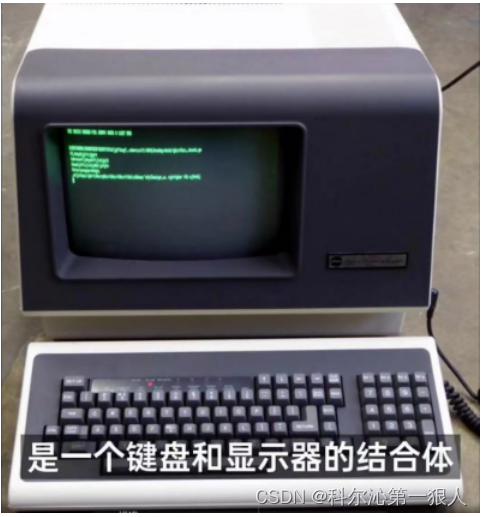
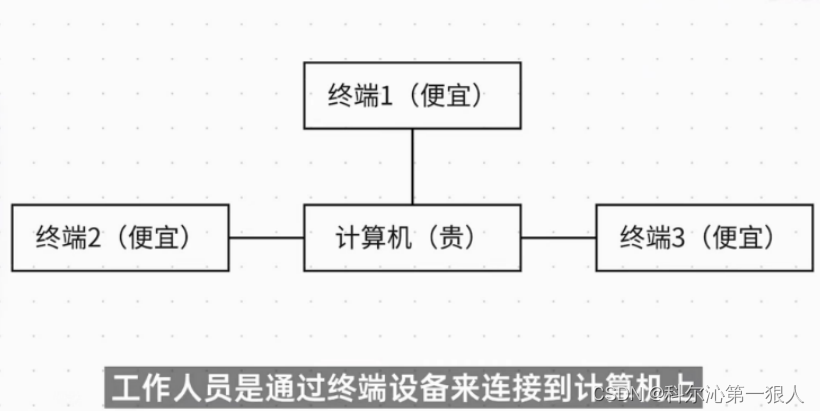
最早的终端是一种物理机器,是一个键盘和显示器的结合体。通过线缆连接在主机上,由于早期的计算机很贵很庞大,不可能人手一台,所以工作人员是通过终端设备来连接到计算机上,键盘提供文字输入,显示器提供文本输出,这样就提供了一个人机交互的接口。
另外在主机上还有一种特殊终端,他是直接集成到主机上的,这种特殊的终端被称为控制台。控制台的特点在于它只能被管理员使用,且每一台计算机只能有一个控制台,它在外观上与普通终端并没有太大的差异,但是它具有最高的权限(例如以单用户模式启动操作系统时,控制台是唯一的可登录终端,其他终端是没有权限登陆的)。
终端模拟器(虚拟终端)
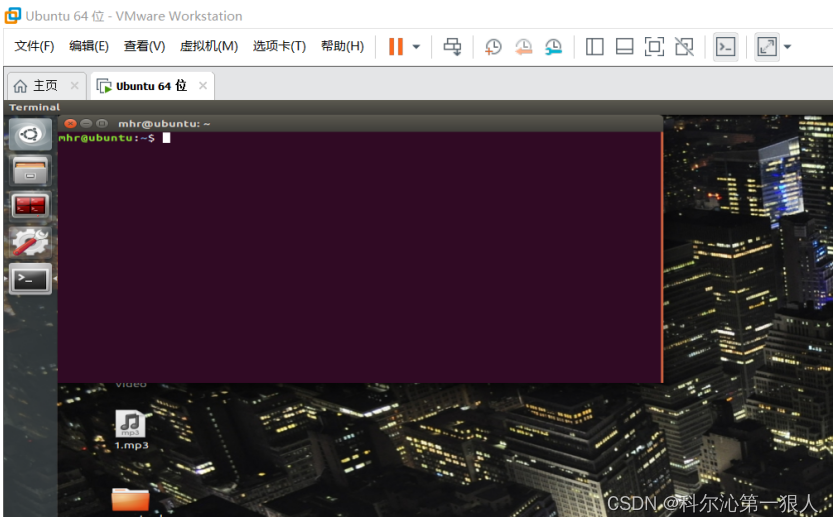
平时我们打开的 Linux 命令行窗口也是一个终端,不过它是用软件的方式来模拟一个终端设备,一般被称为终端模拟器。就是这种小的,非全屏的。
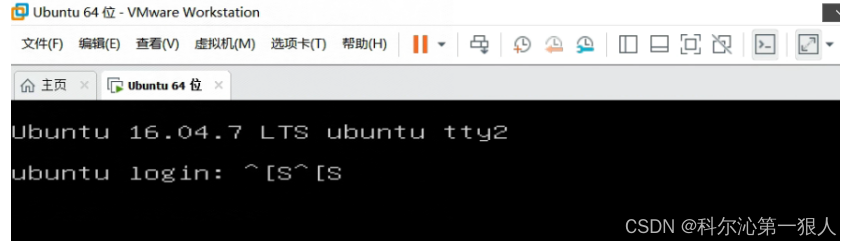
Linux 操作系统启动时默认是有 7 个虚拟终端的,这些虚拟终端并非是我们平时在桌面打开的虚拟终端,而是直接通过显示器显示的。我们可以通过 Ctrl + Alt + F1 切换到第一个终端、通过 Ctrl + Alt + F2 切换到第二个终端,以此类推。对于图形界面而言,Ctrl + Alt + F7 是图形终端,其他都是文字终端。
如下:
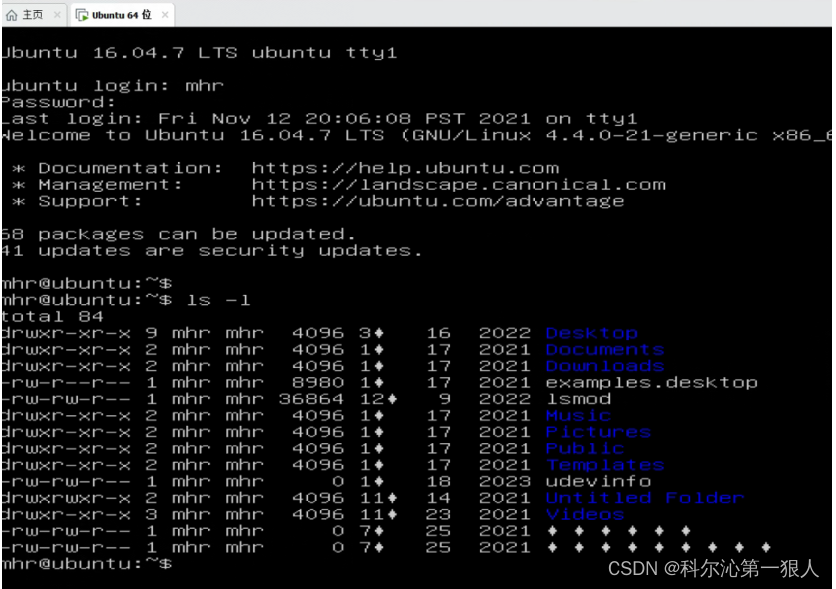
Ctrl + Alt + F1 切换到第一个终端、通过 Ctrl + Alt + F2 切换到第二个终端,以此类推:
输入账号密码后:
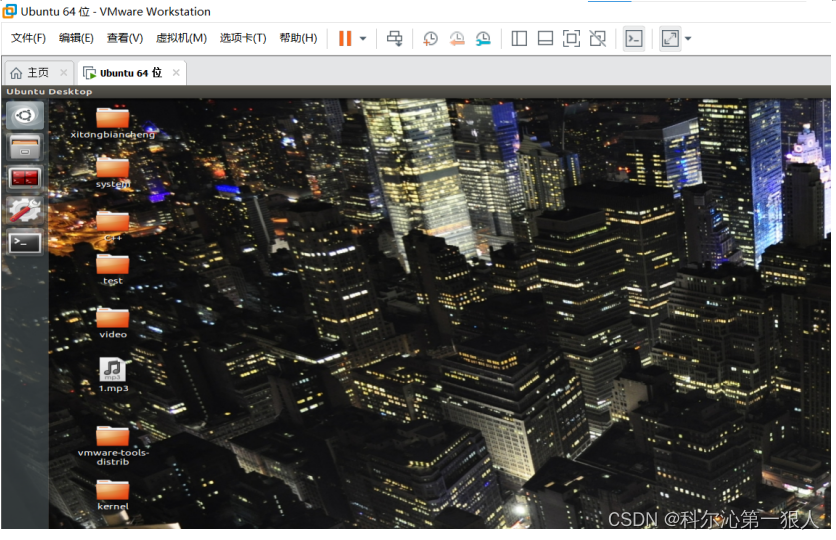
而Ctrl + Alt + F7 是图形终端,执行后发现就是桌面:
这些由显示器显示的全屏终端界面与普通终端模拟器唯一区别在于 全屏终端界面它们是由操作系统内核直接提供的,因此它们也被称为虚拟控制台(Virtual Console)。而我们平时常用的终端模拟器则被称为终端窗口(Terminal Window),本质上并无分别。



















 1429
1429

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











