







一、modbus的介绍
1.简介
Modbus是一种串行通信协议,于1979年为使用可编程逻辑控制器(PLC)通信而发表。Modbus已经成为工业领域通信协议的业界标准(De facto),并且现在是工业电子设备之间常用的连接方式,Modbus协议目前存在用于串口、以太网以及其他支持互联网协议的网络的版本。
2.具体内容
2.1 modbus通用帧:
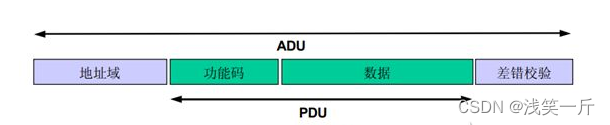
ADU: 应用数据单元
PDU: 协议数据单元
2.2 数据校验方式:
2.2.1 CRC-16(循环冗余错误校验)
1)定义一个16位的无符号变量CR,初值为0XFFFF;
2)把报文的第一个八位字节和CR的低字节异或,结果送入CR;
3)若CR最低位为0,将CR右移一位送入 CR,转5,否则跳过;
4)若CR最低位为1,将CR右移一位送入 CR,然后将CR与0XA001异或的结果送入CR,否则跳过;
5)移位次数n++,n<8则转3,否则转6;
6)重复步骤2和5,进行通讯信息帧下一个字节的处理;
7)CR中生成的即是最终的CRC校验码;
8)当CRC值放在报文中的时候高低字节必须交换位置;
2.2.2 LRC(纵向冗余错误校验)
将ASCII码帧的头尾去掉,将串中的每个字节转成16进制相加,将相加后的结果取反加1(补码)
ASCII 模式采用LRC校验,RTU模式采用16 位CRC校验。
2.3 Modbus主站和从站的区别:
2.3.1.发出指令不同
1)Modbus主站:Modbus主站可以主动发出指令。
2)Modbus从站:Modbus从站不会主动发出指令。
2.3.2.唯一性不同
1)Modbus主站:Modbus主站具有唯一性。
2)Modbus从站:Modbus从站不具有唯一性,可以有多个。
2.3.3.对接不同
1)Modbus主站:Modbus主站可以对接多个Modbus从站。
2)Modbus从站:Modbus从站职能对接一个Modbus主站。
2.4 Modbus 寄存器类型:

线圈状态对应开出(遥控)
离散量输入对应开入(遥信)
输入寄存器对应只读的模拟量(遥测)
保持寄存器对应可读可写的模拟量(遥调)
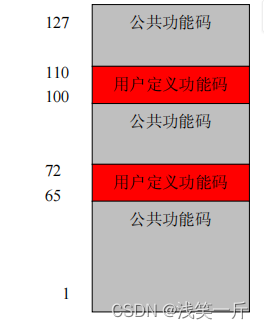
2.5 Modbus 常用功能码:

**公共功能码和用户定义功能码:**
2.6 大小端介绍:
MODBUS 采用大端来表示地址和数据对象。
1)小端:低位字节排放在内存的低地址端,高位字节排放在内存的高地址端。
例如:0x12345678
存储:
低地址 --------------------- 高地址
0x78 0x56 0x34 0x12
2)大端:高位字节排放在内存的低地址端,低位字节排放在内存的高地址端。
例如:0x12345678
存储:
低地址 --------------------- 高地址
0x12 0x34 0x56 0x78
2.7 MODBUS 响应
一旦服务器处理请求,使用合适的 MODBUS 服务器事务建立 MODBUS 响应。根据处理结果,可以建立两种类型响应:
1)一个正 MODBUS 响应:
响应功能码 = 请求功能码
2) 一个 MODBUS 异常响应:
用来为客户机提供处理过程中与被发现的差错相关的信息;
响应功能码 = 请求功能码 + 0x80;
提供一个异常码来指示差错原因。
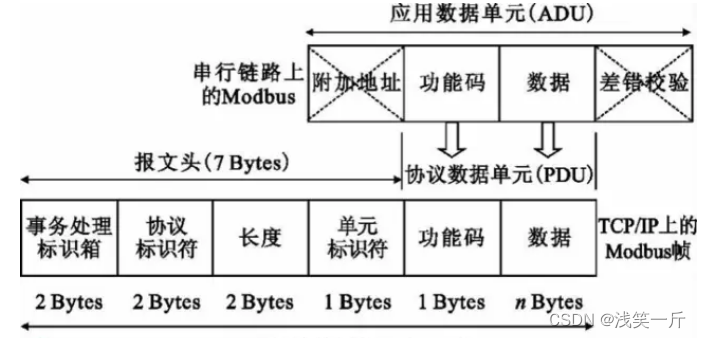
2.8 报文类型(RTU、ASCII、TCP)
Modbus规约上有三种不同的协议,分别是ModbusRTU、ModbusAscII、ModbusTCP,其中RTU和ASCII主要用于串行通信领域,而TCP则常用于以太网通信。
2.8.1 RTU (Remote Terminal Unit 远程终端单元)
Modbus RTU常采用RS-485做为物理层,一般利用芯片的串口实现数据报文的收发,报文数据采用二进制数据进行通信。当设备使用RTU 模式在Modbus 串行链路通信, 报文中每个8位字节含有两个4 位十六进制字符。这种模式的主要优点是较高的数据密度,在相同的波特率下比ASCII 模式有更高的吞吐率。每个报文必须以连续的字符流传送。设备必须要有RTU协议!这是Modbus协议上规定的,且默认模式必须是RTU,ASCII作为选项。
报文格式:

2.8.1.1 单个保持寄存器的读写:
1)保持寄存器读操作:
发送:
假设从机地址为01H,读取的保持寄存器的起始地址为006BH,读取3个寄存器

响应:
每个保持寄存器的长度为2个字节。保持寄存器之间,低地址寄存器先传输,高地址寄存器后传输。单个保持寄存器,高字节数据先传输,低字节数据后传输。

2)保持寄存器写操作:
发送:
假设从机地址为01H,保持寄存器的地址为0001H,数据位0003H

响应:
如果写入成功,返回发送的指令,即01 06 00 01 00 03 98 0B。
其他寄存器的读写请参看该博文: https://blog.youkuaiyun.com/qq446252221/article/details/125293329
2.8.2 Ascii
Modbus ASCII是一种人类可读的,冗长的表示方式,ASCII 可打印字符便于故障检测,而且对于用高级语言(如 Fortan)编程的主计算机及主 PC 很适宜。在 ASCII 模式中,以(:)号(ASCII3AH)表示信息开始,以回撤一换行键(CRLF) (ASCII OD 和 OAH)表示信息结束。对其它的区,允许发送的字符为 16 进制字符 0-9,A-F。网络中设备连续检测并接收一个冒号(:)时,每台设备对地址区解码,找出要寻址的设备。字符之间的最大间隔为 1S,若大于 1S,则接收设备认为出现了一个错误。
开始字符(:)+从站地址(2个字节)+功能码(2个字节)+数据部分(N个字节)校验、CRC检验(2个字节)+结束字符(CR LF)
、 
2.8.3 TCP
Modbus -TCP,是基于在以太网TCP/IP上,将数据以Modbus帧格式进行传输。
modbus TCP 和 modbus RTU基本相同,但是也存在一些区别:
1)从机地址变得不再重要,多数情况下忽略。从某种意义上说从机地址被IP地址取代。
2)CRC校验变得不再重要,甚至可以忽略。由于TCP数据包中已经存在校验,为了不重复造轮子,modbus TCP干脆取消了CRC校验。
TCP 模式去除了附加地址和校验,增加了报文头:
2.8.3.1 单个保持寄存器的读写:
1)保持寄存器读操作:
发送:
读取服务器1号从站保持寄存器,起始地址为0x6B=107,对应地址为40108,寄存器数量为0x02=2,即读取1号从站保持寄存器,地址从40108-40109,共2个寄存器的数值:

响应:
返回服务器1号从站保持寄存器40108-40109,共2个寄存器的数值,返回字节数为4个,分别为02 2B 01 06,40108对应数值为0x022B,40109对应数值为0x0106:

1)保持寄存器写操作:
发送:
预置服务器1号从站单个保持寄存器的值,寄存器地址为0x0087=135,对应地址为40136,写入值为0x039E,即预置1号从站保持寄存器40136值为0x039E:

响应:
预置单保持寄存器原报文返回。
其他寄存器的读写请参看该博文: https://blog.youkuaiyun.com/xiketangAndy/article/details/120204238
二、modbus串口下测试环境搭建
1.ModbusPollSetup64Bit安装:Modbus主设备模拟软件
下载地址: https://download.youkuaiyun.com/download/linyibin_123/87323117
这款软件主要是用来测试或者是调试从属设备,拥有多个用途,软件为通信设备开发人员进行其通讯协议模拟、测试提供了有利且充足的实验环境,使它为监控、测试及调试通讯设备开辟了一条完美的渠道路径。软件支持多个窗口中同时监控多个子设备,支持多种电气接口和多种规格监视串口数据,接入总网络中即可进行操作管理,并可读写超100个寄存器和2000个输入/线圈,对设备实现集群监控管理,方便用户使用。
**安装与操作关键点:**
1)单击Connection->Connect,弹出注册窗口;打开压缩包解压后的SN文件,复制ModbusPoll的序列号,粘贴到注册窗口的注册栏
2)选择"Display"->“Communication…”,可打开查看收发报文的窗口。通过这个窗口可以查看当前的原始收发报文,有助于异常的分析。
3)点击"Function"->“Test Center”,可以打开串口调试功能的窗口。通过这个窗口可以自己编辑发送的报文。
2.ModbusSlaveSetup64Bit安装:Modbus从设备模拟软件
Modbus Slave是Modbus子设备模拟工具,可以仿真32个从设备/地址域。每个接口都提供了对EXCEL报表的OLE自动化支持。帮助Modbus通讯设备开发人员进行Modbus通讯协议的模拟和测试,用于模拟、测试、调试Modbus通讯设备。与Modbus Poll的用户界面相同,支持功能01, 02, 03, 04, 05, 06, 15, 16, 22 和23,监视串口数据。
下载地址: https://download.youkuaiyun.com/download/linyibin_123/87323123
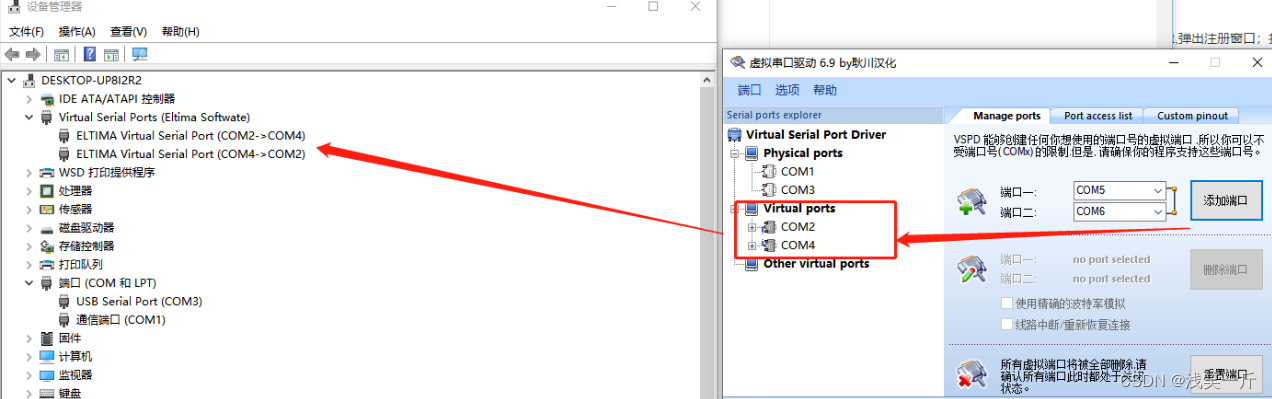
3.虚拟串口vspd安装:
virtual serial port driver简称vspd,这是一款强大的虚拟串口软件。如果你的电脑没有串口,可以使用virtual serial port driver来代替。虚拟端口,创建虚拟串口驱动程序,工作和实际的一样。他们模仿真实的串口波特率设置和提供严格的仿真和全handflow控制支持。此外,你可以很 容易地模拟串行线中断。
下载地址: https://download.youkuaiyun.com/download/linyibin_123/87323130
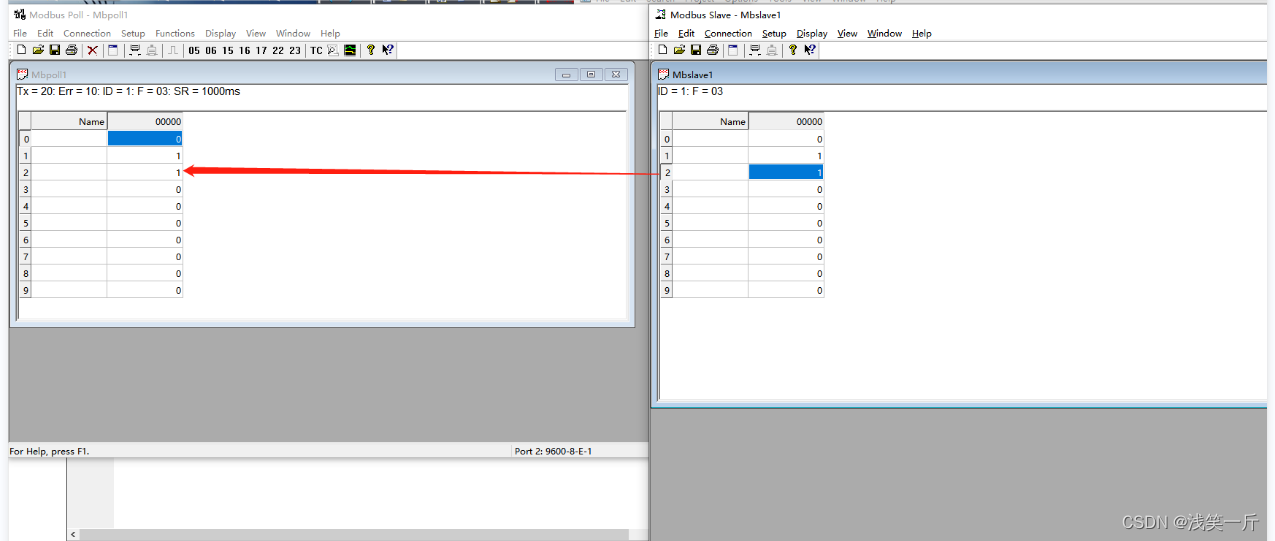
4.安装包程序测试结果:
虚拟串口软件创建COM2与COM4, Modbus-Poll选择COM2进行连接,Modbus-Slave选择COM4进行连接,如下图修改Modbus-Slave的寄存器值,Modbus-Poll能准确获取到:
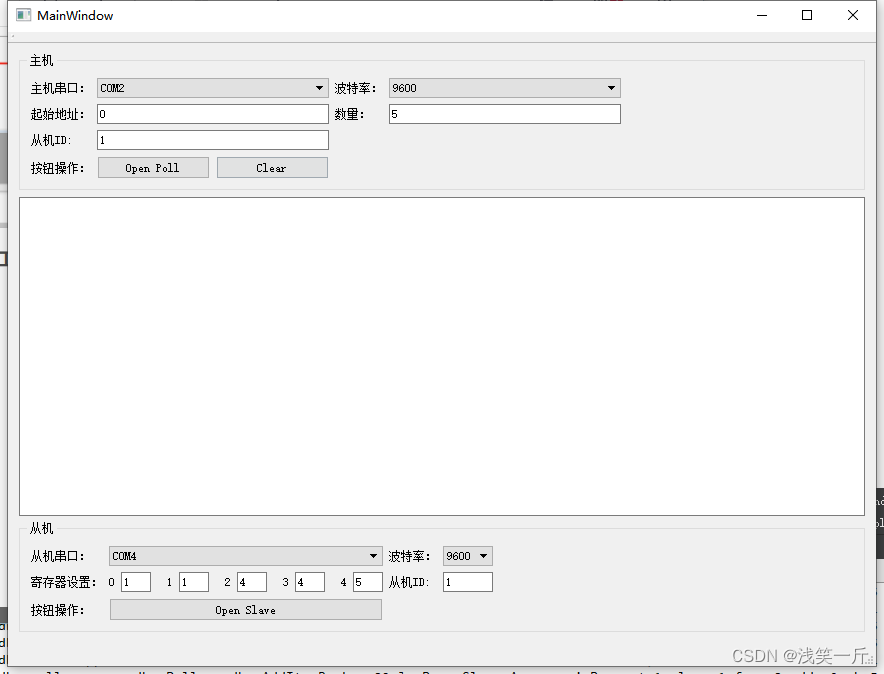
三、qt-modbus串口工程
1.界面
2.核心代码
2.1 主机
modbuspoll.h
#ifndef MODBUSPOLL_H
#define MODBUSPOLL_H
#include <QObject>
#include <QThread>
#include "modbus.h"
#include <QSerialPort>
#include <QSerialPortInfo>
#include <QDebug>
#include <QTimer>
#include <QStringList>
#include <QThread>
class modbusPoll : public QObject
{
Q_OBJECT
public:
explicit modbusPoll(QObject *parent = nullptr);
~modbusPoll();
//单例
static modbusPoll& getInstance();
//接收从机消息回调函数
static void modbusAddItemBack(modbus_t *pModbus, uint8_t isRequest, uint8_t Slave,
uint8_t func, uint16_t addr, uint16_t nb, uint16_t expectedCRC,
uint16_t actualCRC);
void setReadAddrAndNum(int nReadStartAddr, int nReadNum);
void setSlaveId(int nSlaveId);
signals:
//返回从机信息信号
void sig_returnSlaveInfo(QString info);
public slots:
void Init();
void UnInit();
void ConnectPoll(QString sPortName, int nBaudRate);
void DisconnectPoll();
//定时器工作
void TimerWork();
private:
//读取保存寄存器数据
void ReadHoldRegisterData();
private:
bool m_bWork; //连接成功与否标志
int m_nSlaveId; //从机ID
QThread* m_pThread; //线程处理
modbus_t* m_pModbusRtu; //modbus rtu对象
QTimer* m_pTimer; //数据更新定时器
int m_nReadNum;
int m_nReadStartAddr;
};
#endif // MODBUSPOLL_H
modbuspoll.cpp
#include "modbuspoll.h"
#include "commondef.h"
uint16_t g_modbus_hold_reg[100] = {0};
modbusPoll::modbusPoll(QObject *parent)
{
Q_UNUSED(parent)
m_nReadNum = 3;
m_nReadStartAddr = 0;
m_nSlaveId = 1;
m_bWork = false;
m_pThread = new QThread();
this->moveToThread(m_pThread);
connect(m_pThread, SIGNAL(started()),
this, SLOT(Init()));
connect(m_pThread, SIGNAL(finished()),
this, SLOT(UnInit()));
m_pThread->start();
}
modbusPoll::~modbusPoll()
{
m_pThread->quit();
m_pThread->wait();
}
modbusPoll &modbusPoll::getInstance()
{
static modbusPoll s_obj;
return s_obj;
}
void modbusPoll::modbusAddItemBack(modbus_t *pModbus, uint8_t isRequest, uint8_t Slave, uint8_t func, uint16_t addr, uint16_t nb, uint16_t expectedCRC, uint16_t actualCRC)
{
Q_UNUSED(pModbus);
MY_DEBUG << "Recv Slave Answer:" << "isRequest" << isRequest << "slave" << Slave << "func" << func \
<< "addr" << addr << "nb" << nb << "expectedCRC" << expectedCRC << "actualCRC" << actualCRC;
}
void modbusPoll::ReadHoldRegisterData()
{
QString sErr;
modbus_set_slave(m_pModbusRtu, m_nSlaveId);
//读寄存器设置:寄存器地址、数量、数据缓冲
int nRet = modbus_read_registers(m_pModbusRtu, m_nReadStartAddr, m_nReadNum, g_modbus_hold_reg);
if(nRet != m_nReadNum)
{
if(nRet < 0 )
{
if(
#ifdef WIN32
errno == WSAETIMEDOUT ||
#endif
errno == EIO
)
{
sErr += tr( "I/O error" );
sErr += ": ";
sErr += tr( "did not receive any data from slave." );
}
else
{
sErr += tr( "Protocol error" );
sErr += ": ";
sErr += tr( "Slave threw exception '" );
sErr += modbus_strerror( errno );
sErr += tr( "' or function not implemented." );
}
}
else
{
sErr += tr( "Protocol error" );
sErr += ": ";
sErr += tr( "Number of registers returned does not "
"match number of registers requested!" );
}
}
if(sErr.size() > 0)
{
emit sig_returnSlaveInfo("Read Failed:" + sErr);
}
else
{
QString sInfo = QString("Slave ID: %1 modbus read : %2 %3 %4 %5 %6 \r\n ")\
.arg(QString::number(m_nSlaveId)).arg(g_modbus_hold_reg[0])\
.arg(g_modbus_hold_reg[1]).arg(g_modbus_hold_reg[2])\
.arg(g_modbus_hold_reg[3]).arg(g_modbus_hold_reg[4]);
emit sig_returnSlaveInfo(sInfo);
}
}
void modbusPoll::Init()
{
m_pTimer = new QTimer();
m_pTimer->stop();
connect(m_pTimer, &QTimer::timeout,
this, &modbusPoll::TimerWork);
}
void modbusPoll::UnInit()
{
m_pTimer->stop();
delete m_pTimer;
if(m_bWork)
{
//关闭设备
modbus_close(m_pModbusRtu);
modbus_free(m_pModbusRtu);
}
}
void modbusPoll::ConnectPoll(QString sPortName, int nBaudRate)
{
MY_DEBUG << "ConnectPoll:" << QThread::currentThreadId();
//设置串口信息:端口,波特率,校验位,数据位,停止位
m_pModbusRtu = modbus_new_rtu(sPortName.toLatin1().data(), nBaudRate, 'N', 8, 1);
//设置从机地址
modbus_set_slave(m_pModbusRtu, m_nSlaveId);
//设置串口模式(可选)
//modbus_rtu_set_serial_mode(m_pModbusRtu, MODBUS_RTU_RS485);
//设置RTS(可选)
//modbus_rtu_set_rts(m_pModbusRtu, MODBUS_RTU_RTS_UP);
//打开串口,建立连接
if(modbus_connect(m_pModbusRtu) == -1)
{
MY_DEBUG << "Connect Failed:" << modbus_strerror(errno);
modbus_free(m_pModbusRtu);
return;
}
//设置应答延时(可选)
//modbus_set_response_timeout(m_pModbusRtu, 0, 1000000);
//设置回调函数,获取主从交互信息
modbus_register_monitor_add_item_fnc(m_pModbusRtu, modbusPoll::modbusAddItemBack);
m_pTimer->start(1000);
m_bWork = true;
}
void modbusPoll::DisconnectPoll()
{
MY_DEBUG << "DisconnectPoll:" << QThread::currentThreadId();
m_pTimer->stop();
//关闭设备
modbus_close(m_pModbusRtu);
modbus_free(m_pModbusRtu);
m_bWork = false;
}
void modbusPoll::setReadAddrAndNum(int nReadStartAddr, int nReadNum)
{
m_nReadNum = nReadNum;
m_nReadStartAddr = nReadStartAddr;
}
void modbusPoll::setSlaveId(int nSlaveId)
{
m_nSlaveId = nSlaveId;
}
void modbusPoll::TimerWork()
{
ReadHoldRegisterData();
}
2.2 从机
modbusslave.h
#ifndef MODBUSSLAVE_H
#define MODBUSSLAVE_H
#include <QObject>
#include <QThread>
#include "modbus.h"
#include <QSerialPort>
#include <QSerialPortInfo>
#include <QDebug>
#include <QTimer>
#include <QStringList>
#include <QThread>
class modbusSlave : public QObject
{
Q_OBJECT
public:
explicit modbusSlave(QObject *parent = nullptr);
~modbusSlave();
//单例
static modbusSlave& getInstance();
//接收主机消息回调函数
static void modbusRawDataBack(modbus_t * pModbus, uint8_t * pData,
uint8_t dataLen, uint8_t addNewline, uint8_t direction);
void setSlaveId(int nSlaveId);
void setRegVal(int nVal0, int nVal1, int nVal2, int nVal3, int nVal4);
public slots:
void Init();
void UnInit();
void ConnectSlave(QString sPortName, int nBaudRate);
void DisconnectSlave();
//定时器工作
void TimerWork();
private:
bool m_bWork; //连接成功与否标志
int m_nSlaveId; //从机ID
QThread* m_pThread; //线程处理
modbus_t* m_pModbusRtu; //modbus rtu对象
modbus_mapping_t* m_pModbusMapping = nullptr; //寄存器
QTimer* m_pTimer; //数据更新定时器
int m_nReadNum;
int m_nReadStartAddr;
};
#endif // MODBUSSLAVE_H
modbusslave.cpp
#include "modbusslave.h"
#include "commondef.h"
modbusSlave::modbusSlave(QObject *parent)
{
Q_UNUSED(parent)
m_bWork = false;
m_pThread = new QThread();
this->moveToThread(m_pThread);
connect(m_pThread, SIGNAL(started()),
this, SLOT(Init()));
connect(m_pThread, SIGNAL(finished()),
this, SLOT(UnInit()));
m_pThread->start();
}
modbusSlave::~modbusSlave()
{
m_pThread->quit();
m_pThread->wait();
}
modbusSlave &modbusSlave::getInstance()
{
static modbusSlave s_obj;
return s_obj;
}
void modbusSlave::modbusRawDataBack(modbus_t *pModbus, uint8_t *pData, uint8_t dataLen, uint8_t addNewline, uint8_t direction)
{
Q_UNUSED(pModbus);
Q_UNUSED(addNewline);
QString sDump;
for(int i = 0; i < dataLen; ++i)
{
sDump += QString::asprintf( "%.2x ", pData[i]);
}
if(direction == 0)
{
MY_DEBUG << "Slave receive Poll Success, Data:" << sDump;
}
}
void modbusSlave::setSlaveId(int nSlaveId)
{
m_nSlaveId = nSlaveId;
}
void modbusSlave::setRegVal(int nVal0, int nVal1, int nVal2, int nVal3, int nVal4)
{
//MY_DEBUG << "setRegVal";
if(m_bWork)
{
if(m_pModbusMapping && m_pModbusMapping->tab_registers)
{
m_pModbusMapping->tab_registers[0] = nVal0;
m_pModbusMapping->tab_registers[1] = nVal1;
m_pModbusMapping->tab_registers[2] = nVal2;
m_pModbusMapping->tab_registers[3] = nVal3;
m_pModbusMapping->tab_registers[4] = nVal4;
}
}
}
void modbusSlave::Init()
{
m_pTimer = new QTimer();
m_pTimer->stop();
connect(m_pTimer, &QTimer::timeout,
this, &modbusSlave::TimerWork);
}
void modbusSlave::UnInit()
{
m_pTimer->stop();
delete m_pTimer;
if(m_bWork)
{
modbus_close(m_pModbusRtu);
modbus_free(m_pModbusRtu);
}
}
void modbusSlave::ConnectSlave(QString sPortName, int nBaudRate)
{
MY_DEBUG << "ConnectSlave:" << QThread::currentThreadId();
MY_DEBUG << "ConnectSlave sPortName:" << sPortName << ", nBaudRate:" << nBaudRate << ", m_nSlaveId:" << m_nSlaveId;
//打开端口: 端口,波特率,校验位,数据位,停止位
m_pModbusRtu = modbus_new_rtu(sPortName.toLatin1().data(), nBaudRate, 'N', 8, 1);
//设置从机地址
modbus_set_slave(m_pModbusRtu, m_nSlaveId);
//建立连接
if(modbus_connect(m_pModbusRtu) == -1)
{
MY_DEBUG << "Connect Failed:" << modbus_strerror(errno);
modbus_free(m_pModbusRtu);
return;
}
//寄存器map初始化
m_pModbusMapping = modbus_mapping_new(MODBUS_MAX_READ_BITS, 0, MODBUS_MAX_READ_REGISTERS, 0);
if(nullptr == m_pModbusMapping)
{
MY_DEBUG << "Connect Failed:" << (stderr, "Failed to allocate the mapping: %s\n",
modbus_strerror(errno));
modbus_free(m_pModbusRtu);
return;
}
//设置寄存器的值
m_pModbusMapping->tab_registers[0] = 1;
m_pModbusMapping->tab_registers[1] = 2;
m_pModbusMapping->tab_registers[2] = 3;
m_pModbusMapping->tab_registers[3] = 4;
m_pModbusMapping->tab_registers[4] = 5;
//设置回调函数,获取主从交互信息
modbus_register_monitor_raw_data_fnc(m_pModbusRtu, modbusSlave::modbusRawDataBack);
m_pTimer->start(300);
m_bWork = true;
}
void modbusSlave::DisconnectSlave()
{
MY_DEBUG << "DisconnectSlave";
m_pTimer->stop();
modbus_close(m_pModbusRtu);
modbus_free(m_pModbusRtu);
m_bWork = false;
}
void modbusSlave::TimerWork()
{
int rc = 0;
uint8_t query[MODBUS_TCP_MAX_ADU_LENGTH] = {0};
rc = modbus_receive(m_pModbusRtu, query);
if(rc > 0)
{
modbus_reply(m_pModbusRtu, query, rc, m_pModbusMapping);
}
}
2.3 调用
mainwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include <QMainWindow>
#include "modbuspoll.h"
#include "modbusslave.h"
namespace Ui {
class MainWindow;
}
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
explicit MainWindow(QWidget *parent = 0);
~MainWindow();
//更新串口号
void SearchSerial();
signals:
void sig_connectPoll(QString sPortName, int nBaudRate);
void sig_disconnectPoll();
void sig_connectSlave(QString sPortName, int nBaudRate);
void sig_disconnectSlave();
private slots:
void on_pushButton_Poll_clicked();
void on_pushButton_ClearPollInfo_clicked();
void on_pushButton_Slave_clicked();
void on_showSlaveInfo(QString sInfo);
//定时器工作
void TimerWork();
private:
Ui::MainWindow *ui;
QTimer* m_pTimer;
QStringList m_oldPortStringList;
};
#endif // MAINWINDOW_H
mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
#include "commondef.h"
MainWindow::MainWindow(QWidget *parent) :
QMainWindow(parent),
ui(new Ui::MainWindow)
{
ui->setupUi(this);
SearchSerial();
connect(this, &MainWindow::sig_connectPoll,
&modbusPoll::getInstance(), &modbusPoll::ConnectPoll);
connect(this, &MainWindow::sig_disconnectPoll,
&modbusPoll::getInstance(), &modbusPoll::DisconnectPoll);
connect(&modbusPoll::getInstance(), &modbusPoll::sig_returnSlaveInfo,
this, &MainWindow::on_showSlaveInfo);
connect(this, &MainWindow::sig_connectSlave,
&modbusSlave::getInstance(), &modbusSlave::ConnectSlave);
connect(this, &MainWindow::sig_disconnectSlave,
&modbusSlave::getInstance(), &modbusSlave::DisconnectSlave);
m_pTimer = new QTimer();
m_pTimer->stop();
connect(m_pTimer, &QTimer::timeout,
this, &MainWindow::TimerWork);
}
MainWindow::~MainWindow()
{
delete ui;
}
void MainWindow::SearchSerial()
{
QStringList newPortStringList;
const auto infos = QSerialPortInfo::availablePorts();
for (const QSerialPortInfo &info : infos)
{
newPortStringList += info.portName();
}
if(newPortStringList.size() != m_oldPortStringList.size())
{
m_oldPortStringList = newPortStringList;
ui->comboBox_PollSerial->clear();
ui->comboBox_PollSerial->addItems(m_oldPortStringList);
ui->comboBox_SlaveSerial->clear();
ui->comboBox_SlaveSerial->addItems(m_oldPortStringList);
}
}
void MainWindow::on_pushButton_Poll_clicked()
{
if(ui->pushButton_Poll->text() == "Open Poll")
{
if(ui->comboBox_PollSerial->currentText().isEmpty() == true)
{
ui->textEdit_Poll->setText(ui->textEdit_Poll->toPlainText().append("Not Set Serial\r\n"));
//textedit 滚动条自动往下滚动
ui->textEdit_Poll->moveCursor(QTextCursor::End);
return;
}
QString sSerialName = ui->comboBox_PollSerial->currentText();
int nBaudrate = ui->comboBox_PollBaudrate->currentText().toInt();
int nReadStartAddr = ui->lineEdit_PollStartAddr->text().toInt();
int nReadNum = ui->lineEdit_PollRegNum->text().toInt();
int nSlaveId = ui->lineEdit_ID->text().toInt();
modbusPoll::getInstance().setReadAddrAndNum(nReadStartAddr, nReadNum);
modbusPoll::getInstance().setSlaveId(nSlaveId);
emit sig_connectPoll(sSerialName, nBaudrate);
ui->pushButton_Poll->setText("Close Poll");
ui->comboBox_PollSerial->setDisabled(true);
ui->comboBox_PollBaudrate->setDisabled(true);
ui->lineEdit_PollRegNum->setDisabled(true);
ui->lineEdit_PollStartAddr->setDisabled(true);
ui->lineEdit_ID->setDisabled(true);
}
else
{
emit sig_disconnectPoll();
ui->pushButton_Poll->setText("Open Poll");
ui->comboBox_PollSerial->setDisabled(false);
ui->comboBox_PollBaudrate->setDisabled(false);
ui->lineEdit_PollRegNum->setDisabled(false);
ui->lineEdit_PollStartAddr->setDisabled(false);
ui->lineEdit_ID->setDisabled(false);
}
}
void MainWindow::on_pushButton_ClearPollInfo_clicked()
{
ui->textEdit_Poll->clear();
}
void MainWindow::on_pushButton_Slave_clicked()
{
if(ui->pushButton_Slave->text() == "Open Slave")
{
MY_DEBUG << "Open Slave 000";
QString sSerialName = ui->comboBox_SlaveSerial->currentText();
int nBaudrate = ui->comboBox_SlaveBaudrate->currentText().toInt();
int nSlaveId = ui->lineEdit_SlaveId->text().toInt();
modbusSlave::getInstance().setSlaveId(nSlaveId);
emit sig_connectSlave(sSerialName, nBaudrate);
MY_DEBUG << "Open Slave 111";
ui->pushButton_Slave->setText("Close Slave");
ui->comboBox_SlaveBaudrate->setDisabled(true);
ui->comboBox_SlaveSerial->setDisabled(true);
m_pTimer->start(1000);
}
else
{
emit sig_disconnectSlave();
m_pTimer->stop();
ui->pushButton_Slave->setText("Open Slave");
ui->comboBox_SlaveSerial->setDisabled(false);
ui->comboBox_SlaveBaudrate->setDisabled(false);
}
}
void MainWindow::on_showSlaveInfo(QString sInfo)
{
ui->textEdit_Poll->setText(ui->textEdit_Poll->toPlainText().append(sInfo + "\r\n"));
//textedit 滚动条自动往下滚动
ui->textEdit_Poll->moveCursor(QTextCursor::End);
}
void MainWindow::TimerWork()
{
int nRegVal0 = ui->lineEdit_Reg0->text().toInt();
int nRegVal1 = ui->lineEdit_Reg1->text().toInt();
int nRegVal2 = ui->lineEdit_Reg2->text().toInt();
int nRegVal3 = ui->lineEdit_Reg3->text().toInt();
int nRegVal4 = ui->lineEdit_Reg4->text().toInt();
modbusSlave::getInstance().setRegVal(nRegVal0, nRegVal1, nRegVal2, nRegVal3, nRegVal4);
}
3.demo工程下载地址
下载地址: https://download.youkuaiyun.com/download/linyibin_123/87326662
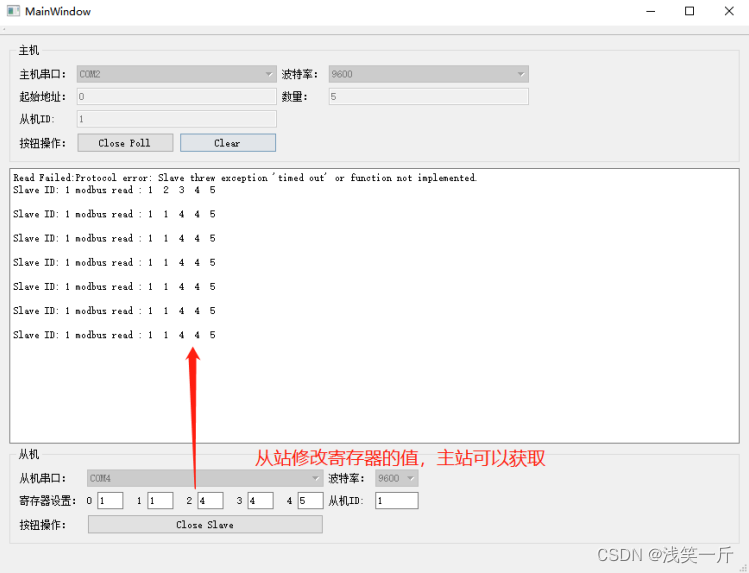
4.测试结果:
三、qt-modbus Tcp
参考该篇:https://www.jianshu.com/p/0ed380fa39eb 修改以上工程即可
这两年,IT行业面临经济周期波动与AI产业结构调整的双重压力,确实有很多运维与网络工程师因企业缩编或技术迭代而暂时失业。
很多人都在提运维网工失业后就只能去跑滴滴送外卖了,但我想分享的是,对于运维人员来说,即便失业以后仍然有很多副业可以尝试。
网工/运维/测试副业方向
运维网工,千万不要再错过这些副业机会!
第一个是知识付费类副业:输出经验打造个人IP
在线教育平台讲师
操作路径:在慕课网、极客时间等平台开设《CCNA实战》《Linux运维从入门到精通》等课程,或与培训机构合作录制专题课。
收益模式:课程销售分成、企业内训。
技术博客与公众号运营
操作路径:撰写网络协议解析、故障排查案例、设备评测等深度文章,通过公众号广告、付费专栏及企业合作变现。
收益关键:每周更新2-3篇原创,结合SEO优化与社群运营。
第二个是技术类副业:深耕专业领域变现
企业网络设备配置与优化服务
操作路径:为中小型企业提供路由器、交换机、防火墙等设备的配置调试、性能优化及故障排查服务。可通过本地IT服务公司合作或自建线上接单平台获客。
收益模式:按项目收费或签订年度维护合同。
远程IT基础设施代维
操作路径:通过承接服务器监控、日志分析、备份恢复等远程代维任务。适合熟悉Zabbix、ELK等技术栈的工程师。
收益模式:按工时计费或包月服务。
网络安全顾问与渗透测试
操作路径:利用OWASP Top 10漏洞分析、Nmap/BurpSuite等工具,为企业提供漏洞扫描、渗透测试及安全加固方案。需考取CISP等认证提升资质。
收益模式:单次渗透测试报告收费;长期安全顾问年费。
比如不久前跟我一起聊天的一个粉丝,他自己之前是大四实习的时候做的运维,发现运维7*24小时待命受不了,就准备转网安,学了差不多2个月,然后开始挖漏洞,光是补天的漏洞奖励也有个四五千,他说自己每个月的房租和饭钱就够了。

为什么我会推荐你网安是运维和网工测试人员的绝佳副业&转型方向?
1.你的经验是巨大优势: 你比任何人都懂系统、网络和架构。漏洞挖掘、内网渗透、应急响应,这些核心安全能力本质上是“攻击视角下的运维”。你的运维背景不是从零开始,而是降维打击。
2.越老越吃香,规避年龄危机: 安全行业极度依赖经验。你的排查思路、风险意识和对复杂系统的理解能力,会随着项目积累而愈发珍贵,真正做到“姜还是老的辣”。
3.职业选择极其灵活: 你可以加入企业成为安全专家,可以兼职“挖洞“获取丰厚奖金,甚至可以成为自由顾问。这种多样性为你提供了前所未有的抗风险能力。
4.市场需求爆发,前景广阔: 在国家级政策的推动下,从一线城市到二三线地区,安全人才缺口正在急剧扩大。现在布局,正是抢占未来先机的黄金时刻。
网工运维测试转行学习网络安全路线

(一)第一阶段:网络安全筑基
1. 阶段目标
你已经有运维经验了,所以操作系统、网络协议这些你不是零基础。但要学安全,得重新过一遍——只不过这次我们是带着“安全视角”去学。
2. 学习内容
**操作系统强化:**你需要重点学习 Windows、Linux 操作系统安全配置,对比运维工作中常规配置与安全配置的差异,深化系统安全认知(比如说日志审计配置,为应急响应日志分析打基础)。
**网络协议深化:**结合过往网络协议应用经验,聚焦 TCP/IP 协议簇中的安全漏洞及防护机制,如 ARP 欺骗、TCP 三次握手漏洞等(为 SRC 漏扫中协议层漏洞识别铺垫)。
**Web 与数据库基础:**补充 Web 架构、HTTP 协议及 MySQL、SQL Server 等数据库安全相关知识,了解 Web 应用与数据库在网安中的作用。
**编程语言入门:**学习 Python 基础语法,掌握简单脚本编写,为后续 SRC 漏扫自动化脚本开发及应急响应工具使用打基础。
**工具实战:**集中训练抓包工具(Wireshark)、渗透测试工具(Nmap)、漏洞扫描工具(Nessus 基础版)的使用,结合模拟场景练习工具应用(掌握基础扫描逻辑,为 SRC 漏扫工具进阶做准备)。
(二)第二阶段:漏洞挖掘与 SRC 漏扫实战
1. 阶段目标
这阶段是真正开始“动手”了。信息收集、漏洞分析、工具联动,一样不能少。
熟练运用漏洞挖掘及 SRC 漏扫工具,具备独立挖掘常见漏洞及 SRC 平台漏扫实战能力,尝试通过 SRC 挖洞搞钱,不管是低危漏洞还是高危漏洞,先挖到一个。
2. 学习内容
信息收集实战:结合运维中对网络拓扑、设备信息的了解,强化基本信息收集、网络空间搜索引擎(Shodan、ZoomEye)、域名及端口信息收集技巧,针对企业级网络场景开展信息收集练习(为 SRC 漏扫目标筛选提供支撑)。
漏洞原理与分析:深入学习 SQL 注入、CSRF、文件上传等常见漏洞的原理、危害及利用方法,结合运维工作中遇到的类似问题进行关联分析(明确 SRC 漏扫重点漏洞类型)。
工具进阶与 SRC 漏扫应用:
-
系统学习 SQLMap、BurpSuite、AWVS 等工具的高级功能,开展工具联用实战训练;
-
专项学习 SRC 漏扫流程:包括 SRC 平台规则解读(如漏洞提交规范、奖励机制)、漏扫目标范围界定、漏扫策略制定(全量扫描 vs 定向扫描)、漏扫结果验证与复现;
-
实战训练:使用 AWVS+BurpSuite 组合开展 SRC 平台目标漏扫,练习 “扫描 - 验证 - 漏洞报告撰写 - 平台提交” 全流程。
SRC 实战演练:选择合适的 SRC 平台(如补天、CNVD)进行漏洞挖掘与漏扫实战,积累实战经验,尝试获取挖洞收益。
恭喜你,如果学到这里,你基本可以下班搞搞副业创收了,并且具备渗透测试工程师必备的「渗透技巧」、「溯源能力」,让你在黑客盛行的年代别背锅,工作实现升职加薪的同时也能开创副业创收!
如果你想要入坑黑客&网络安全,笔者给大家准备了一份:全网最全的网络安全资料包需要保存下方图片,微信扫码即可前往获取!
因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取
优快云大礼包:《黑客&网络安全入门&进阶学习资源包》免费分享
(三)第三阶段:渗透测试技能学习
1. 阶段目标
全面掌握渗透测试理论与实战技能,能够独立完成渗透测试项目,编写规范的渗透测试报告,具备渗透测试工程师岗位能力,为护网红蓝对抗及应急响应提供技术支撑。
2. 学习内容
渗透测试核心理论:系统学习渗透测试流程、方法论及法律法规知识,明确渗透测试边界与规范(与红蓝对抗攻击边界要求一致)。
实战技能训练:开展漏洞扫描、漏洞利用、电商系统渗透测试、内网渗透、权限提升(Windows、Linux)、代码审计等实战训练,结合运维中熟悉的系统环境设计测试场景(强化红蓝对抗攻击端技术能力)。
工具开发实践:基于 Python 编程基础,学习渗透测试工具开发技巧,开发简单的自动化测试脚本(可拓展用于 SRC 漏扫自动化及应急响应辅助工具)。
报告编写指导:学习渗透测试报告的结构与编写规范,完成多个不同场景的渗透测试报告撰写练习(与 SRC 漏洞报告、应急响应报告撰写逻辑互通)。
(四)第四阶段:企业级安全攻防(含红蓝对抗)、应急响应
1. 阶段目标
掌握企业级安全攻防、护网红蓝对抗及应急响应核心技能,考取网安行业相关证书。
2. 学习内容
护网红蓝对抗专项:
-
红蓝对抗基础:学习护网行动背景、红蓝对抗规则(攻击范围、禁止行为)、红蓝双方角色职责(红队:模拟攻击;蓝队:防御检测与应急处置);
-
红队实战技能:强化内网渗透、横向移动、权限维持、免杀攻击等高级技巧,模拟护网中常见攻击场景;
-
蓝队实战技能:学习安全设备(防火墙、IDS/IPS、WAF)联动防御配置、安全监控平台(SOC)使用、攻击行为研判与溯源方法;
-
模拟护网演练:参与团队式红蓝对抗演练,完整体验 “攻击 - 检测 - 防御 - 处置” 全流程。
应急响应专项: -
应急响应流程:学习应急响应 6 步流程(准备 - 检测 - 遏制 - 根除 - 恢复 - 总结),掌握各环节核心任务;
-
实战技能:开展操作系统入侵响应(如病毒木马清除、异常进程终止)、数据泄露应急处置、漏洞应急修补等实战训练;
-
工具应用:学习应急响应工具(如 Autoruns、Process Monitor、病毒分析工具)的使用,提升处置效率;
-
案例复盘:分析真实网络安全事件应急响应案例(如勒索病毒事件),总结处置经验。
其他企业级攻防技能:学习社工与钓鱼、CTF 夺旗赛解析等内容,结合运维中企业安全防护需求深化理解。
证书备考:针对网安行业相关证书考试内容(含红蓝对抗、应急响应考点)进行专项复习,参加模拟考试,查漏补缺。
运维网工测试转行网络攻防知识库分享
网络安全这行,不是会几个工具就能搞定的。你得有体系,懂原理,能实战。尤其是从运维转过来的,别浪费你原来的经验——你比纯新人强多了。
但也要沉得住气,别学了两天Web安全就觉得自己是黑客了。内网、域渗透、代码审计、应急响应,要学的还多着呢。
如果你真的想转,按这个路子一步步走,没问题。如果你只是好奇,我劝你再想想——这行要持续学习,挺累的,但也是真有意思。
关于如何学习网络安全,笔者也给大家整理好了全套网络安全知识库,需要的可以扫码获取!
因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取
优快云大礼包:《黑客&网络安全入门&进阶学习资源包》免费分享
1、网络安全意识
2、Linux操作系统
3、WEB架构基础与HTTP协议
4、Web渗透测试
5、渗透测试案例分享

6、渗透测试实战技巧

7、攻防对战实战

8、CTF之MISC实战讲解

关于如何学习网络安全,笔者也给大家整理好了全套网络安全知识库,需要的可以扫码获取!
因篇幅有限,仅展示部分资料,需要点击下方链接即可前往获取

















 9万+
9万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









