



再看构造函数:
前面已经了解过了构造函数,在创建对象的时候,编译器通过调用构造函数,给对象中各个成员一个合适的初始值
class Date
{
public:
Date(int year,int month,int day)
{
_year = year;
_month = month;
_day = day;
}
private:
int _year;
int _month;
int _day;
};
在上面的构造函数中,对象中已经有了一个初始值,但是不能将其称为类对象成员的初始化,构造函数体中操作只能将其称为赋初值,而不能将其称作为初始化,因为初始化只能初始化一次,而构造函数体内,可以给成员多次赋值。
所以我们引入初始化列表:
初始化列表:以一个冒号开始,接着是一个逗号分隔的数据成员列表,每个“成员变量”后面跟着一个放在括号中的初始值或表达式
class Date
{
pubilc:
Date(int year,int month,in day)
:_year(year)
,_month(month)
,_day(day)
{}
private:
int _year;
int _month;
int _day;
};
要注意:
1.每个成员在初始化列表中只能出现一次;
2.初始化列表仅用于初始化类的数据成员,并不指定这些数据成员的初始化顺序,数据成员在类中定义顺序就是在初始化列表中的初始化顺序
3.尽量避免使用成员初始化成员,成员的初始化顺序最好和成员的定义顺序保持一致;
4.类中包含以下成员,一定要放在初始化列表位置进行初始化:
* 引用变量成员
* const成员变量
* 类类型成员(该类有缺省的构造函数)
构造函数的作用:
构造函数不仅可以把对象构造成功,还可以给对象中各个变量一个初始值,有时候还具有类型转换的作用。总结一下:
构造函数作用如下:
1.构造并初始化对象
2.类型转换(只针对单参构造函数,可以将其接受参数转化为类类型对象)
class Date
{
pubilc:
Date(int year)
: _year(year)
{}
private:
int _year;
int _month;
int _day;
};
void Test()
{
Date d1(2018);
//用一个整形变量给日期类型对象赋值
//实际编译器背后会用2019构造一个无名对象,最后用无名对象给d1对象进行赋值
d1 = 2019;
}
如果不想使用单参构造函数可以类型转换的功能,我们只需用explicit修饰构造函数,将会抑制构造函数的隐式转换
当对上面的日期类的构造函数用explicit进行修饰时,表明明确告诉编译器,禁止单参构造函数的类型转换作用,因此Test()函数中的赋值语句会编译失败
默认构造函数:
之前我们了解到:如果一个类中没有显示定义构造函数时,编译器会合成一个默认的构造函数,如果类显示定义了,编译器将不再合成。
编译器合成的构造函数一定是不带参数的
class Date
{
pubilc:
/*
//带有参数的构造函数
Date(int year,int month,int day)
:_year(year)
,_month(month)
,_day(day)
{}
*/
void SetDate(int year,int month,int day)
{
_year = year;
_month = month;
_day = day;
}
private:
int _year;
int _month;
int _day;
};
int main()
{
Date d;
d.SetDate(2018,8,20);
return 0;
}
我们注释掉上面代码的构造函数,对象依然可以创建成功,因为编译器给我们合成了一个默认的不带参数的构造函数,但该默认构造函数实际什么都不做,类似以下方式:
Date()
{}
这种构造函数实际上没有什么意义,合成了就要调用,调用就要该构造函数又没有实际的意义而且还影响程序的效率
其实通过汇编代码可以看见,创建对象语句的底层并没有对应的汇编语言,即编译器并没有合成构造函数
底层的现象时这样的:
因此,编译器对是否合成构造函数进行了优化,编译器会根据自己的需求选择性的合成构造函数,即如果类中没有显示的构造函数,在编译器徐需要且有能力合成时,会合成一个无参的构造函数。例如:
class Time
{
public:
Time(int hour = 0,int minute = 0,int second = 0)
:_hour(hour)
,_minute(minute)
,_second(second)
{}
private:
int _hour;
int _minute;
int _second
};
class Date
{
public:
void SetDate(int year,int month,int day)
{
_year = year;
_month = month;
_day = day;
}
private:
int _year;
int _month;
int _day;
};
int main()
{
Date d;
d.SetDate(2018,8,1);
return 0;
}
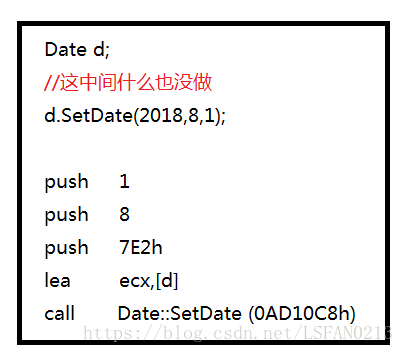
因为Time类显示定义了其缺省的构造函数,Date类没有显示定义其构造函数,其中包括了一个Time类对象。当创建Date类对象时,编译器需要调用Date类的构造函数完成Date类对象的构造,由于Date类没有显示定义其构造函数,此时编译器必须合成:因为Time类的构造函数存在,合成Date构造函数的目的就是为了完成Date类对象中包含的Time类对象的构造。
此时的底层汇编代码:
但是如果将Time类缺省的构造函数改成费缺省构造函数编译器就没有能力合成,此时会报错中。
在C++中,还有友元这一概念,友元就可以理解是朋友。分为友元函数和友元类。
友元函数可以直接访问类中的私有成员,它是定义在类外的普通函数,不属于任何类,但需要在类的内部声明,声明时必须加上friend关键字
class Date
{
friend ostream& operator<<(ostream& _cout,const Date& d);
public:
Date(int year,int month,int day)
: _year(year)
, _month(month)
, _day(day)
{}
private:
int _year;
int _month;
int _day
};
ostream& operator<<(ostream& _cout,const Date& d)
{
_cout<<d._year<<"-"<<d._month<<"-"<<d._day;
return _cout;
}
int main()
{
Date d(2018,8,22);
cout<<d<<endl;
return 0;
}
总结:
友元函数可以访问类的私有成员,但不属于类的成员函数
友元函数不能用const修饰
友元函数可以在类定义的任何地方声明,不受类访问限定符限制
一个函数可以是多个类的友元函数
友元函数的调用与普通函数的调用原理是相同的
友元类:
友元类的所有成员函数都可以是另外一个类的友元函数,都可以访问另一个类中的非公有成员。
class Date; //前置声明
class Time
{
//声明日期类为时间类的友元类,则在日期类中就可以直接访问Time中的私有成员变量
friend class Date;
public:
Time(int hour,int minute,int second)
: _hour(hour)
, _minute(minute)
, _second(second)
{}
private:
int _hour;
int _minute;
int _second;
};
class Date
{
public:
Date(int year,int month,int day)
: _year(year)
, _month(month)
, _day(day)
{}
void SetTimeOfDate(int hour,int minute,int second)
{
//直接访问时间类的私有成员变量
_t._hour = hour;
_t._minute = minute;
_t._second = second;
}
private:
int _year;
int _month;
int _day;
Time _t;
};
认识了友元,我们来分析下友元有什么优点,又有什么缺点
优点:提高了程序运行的效率,因为一旦被friend修饰过的函数或类都可以直接访问任何东西,因此提高了程序的效率
缺点:也正是因为任何东西在友元面前都没有“秘密”,所以它就破坏了类的封装性和隐藏性。
除了这些我们还得注意一些:
友元关系是单向的,不具有交换性。就是说:如果A是B的友元类,那么A就可以访问B的私有成员变量,但是反过来B不能访问A的私有成员变量
再比如说上面的Time类和Date类,在Time类中声明Date类为其友元类,那么可以在Date类中直接访问Time类的私有成员,但是想在Time类中访问Date类的私有成员则不行
友元关系不能传递:
假如B是A的友元,C是B的友元,则不能说明C是A的友元
static成员
声明为static的类成员称为静态成员,用static修饰的成员变量,称之为静态成员变量,用static修饰的成员函数,称之为静态成员函数,静态的成员变量一定要在类外进行初始化
class A
{
public:
A()
{
++_count;
}
A(const A& t)
{
++_count;
}
~A()
{
--_count;
}
static void GetACount()
{
return _count;
}
private:
static int _count;
};
int Test::_count = 0;
void Test()
{
cout<<A::GetACount()<<endl;
A a1,a2;
A a3(a1);
cout<<A::GetACount()<<endl;
}
特性:
静态成员为所有类对象所共享,不属于某个具体的实例
静态成员变量必须在类外定义,定义是不添加static关键字
类静态成员即可用类名::静态成员函数或者对象.静态成员来访问
静态成员函数没有隐藏的this指针,不能访问任何非静态成员
静态成员函数和类的普通成员一样,也有public、protected、private 3种访问级别,也可以具有返回值,const修饰符等参数
提出两个问题:
静态成员函数可以调用非静态成员函数吗?
不可以,因为静态成员函数没有隐藏的this指针,不能访问任何非静态成员
非静态成员可以调用类的静态成员函数吗?
可以,因为静态成员为所有类对象共享,不属于某个具体的实例

















 1072
1072

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









