




 本文提出了一种新的实时跟踪器HCAT,通过设计分层交叉注意力(HCA)结构和特征稀疏化模块,解决了基于Transformer的跟踪器在边缘设备上的速度问题。文章详细介绍了特征提取、融合和预测头的具体方法,以及如何优化计算效率。
本文提出了一种新的实时跟踪器HCAT,通过设计分层交叉注意力(HCA)结构和特征稀疏化模块,解决了基于Transformer的跟踪器在边缘设备上的速度问题。文章详细介绍了特征提取、融合和预测头的具体方法,以及如何优化计算效率。
1.本文针对什么问题
针对跟踪器的速度问题,大多数跟踪器只能在专业的gpu达到实时的跟踪速度,特别是基于transformer的跟踪器,需计算速度与输入成平方关系
2.已有的工作是什么,有什么问题
PrDiMP、DiMP等跟踪模型,但是他们只能在高性能GPU上达到实时速度,在一些边缘设备上根本达不到实际应用的需求
3.为了解决这个问题,做了什么工作
首先,设计了一个分层交叉注意力(HCA)’结构来减少串行性,并使用分层连接方式来增强表示能力;
其次,设计了一个特征稀疏化模块来稀疏模板特征并减少transformer的计算数量;
结合上面的设计,形成了一个新的跟踪器,叫HCAT
4.具体方法是什么
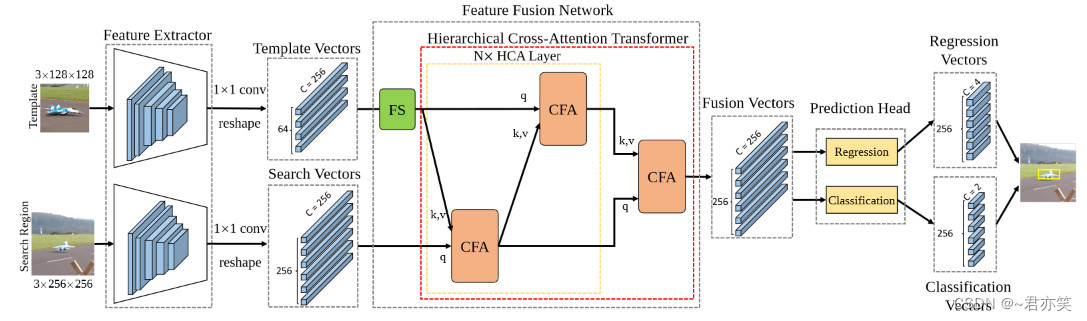
分为三个部分:特征提取网络、特征融合网络、预测头
-
特征提取网络
提取模板特征和搜索区域特征,模板区域是初始框边长的两倍,搜索区域边长是上一帧中目标边长的4倍,然后全部reshape成方形。
结构类似于Siamese网络,使用的特征提取网络是ResNet18,但是移除了最后一阶段;特征提取完之后使用1x1的卷积层来转换通道维度©到256,并且将所有特征在空间维度(H,W)上拉直;采样率是16,大的采样率能够减少特征的分辨率,减少计算损耗;
-
特征融合网络
融合模板和搜索区域的特征。由FS模块和分层交叉注意力两个部分组成:
1) FS模块:如下图所示,稀疏模板特征的向量数量到16(64–>16),减少计算的数量(多层注意力的计算数量为 2 C H x W x H t W t − > 2 C H x W x S 2CH_xW_xH_tW_t->2CH_xW_xS 2CH<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 666
666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









