



舵机PWM控制频率的选取是一项需要细致操作的任务,结合实际应用场景来决定。以机器人关节为例,它需要迅速作出反应;而工业机械臂则更看重其稳定性。频率过高可能会导致设备过热舵机品牌伟创动力,过低则可能降低精度,找到这个合适的平衡点需要不断进行测试。
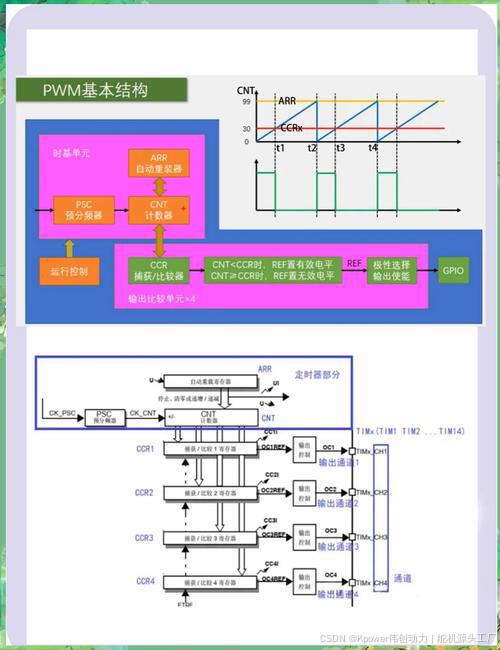
频率对扭矩的影响
使用低频PWM技术可以使舵机输出的扭矩更加平顺,这非常适合用于精密的装配场合。在我们对自动化生产线进行升级改造的过程中舵机厂家伟创动力,我们观察到,将频率从50Hz降低至30Hz之后,机械臂抓取小零件的准确率提升了15%。但需留意,在低速运转时,可能会听到电机发出的明显嗡嗡声。
当PWM频率超过500Hz,电机的热量输出会显著提升。曾经有客户反映舵机的使用寿命较短,经过调查发现伟创动力,问题在于他们错误地将频率调整至800Hz。随后,他们将频率调整回300Hz,在相同负载条件下,温度上升幅度减少了20度。这一案例警示我们,不应盲目追求高频PWM。
占空比与精度的关系
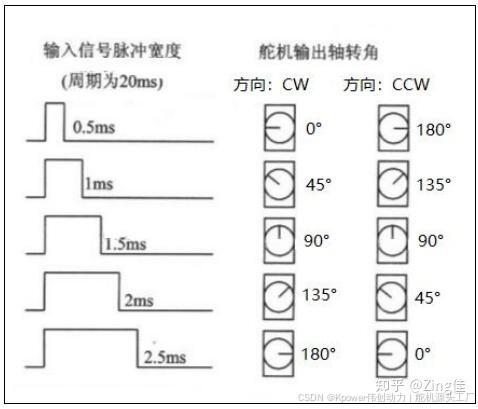
每增加或减少1%的占空比,舵机的转角就会产生大约0.5度的误差。在六足机器人项目的开发过程中,我们通过细致调整占空比,成功将步态误差压缩至0.3度以下。,不同批次的舵机对于占空比的变化反应不尽相同,建议对每一台舵机进行单独的校准。
在使用过程中,我发现了一个有趣的现象:当占空比处于5%到95%的范围内时,其线性度表现得相当出色。然而,当接近极限值时,就会出现所谓的“死区”,此时角度的变化会变得迟缓。举例来说,当从95%调整至100%时,实际的转角可能仅增加2度,而非预期的5度。,在这种情况下,我们需要预留一定的空间。
温度与频率的博弈
在无尘车间进行夏季测试时,经过连续2小时的运作,舵机的温度上升至60℃。为此,我们将频率从300Hz调整至200Hz,结果温度上升速度立刻降低了8℃。然而,需注意的是,这种降温措施会影响到响应速度,这一权衡需根据实际工作条件来决定。
一个小窍门是在控制面板上安装一个温度感应器,一旦感应到60摄氏度,系统便会自动将频率减少20%。我们为一家医疗设备制造商设计的方案便是运用了这一技术,成功解决了设备长时间运行中的稳定性难题。客户反馈称,故障率已经降至零。
线材选择的讲究
普通杜邦线在高频PWM操作时,信号会显著减弱。通过实际测试,我们发现使用硅胶线替代PVC外皮线,信号质量可以提高30%。曾有一位客户抱怨控制不准确,经过检查,我们发现是他们使用了低质量的连接线,更换为合格线材后,问题便得到了迅速解决。
信号线的长度选择很重要。当长度超过1米时,推荐使用双绞线,这样可以有效减少干扰。曾经遇到一个例子,一位工程师将线缆捆绑得过紧,结果导致了PWM波形的变形。后来,他将线缆改为松散布置,并注意了角度的控制,波形立刻变得精准多了。
不同负载下的调参
在空载和负载情况下,最佳频率可能存在50Hz的差距。我们进行了对比试验:在2公斤的负载下,200Hz时的误差最小;而在无负载状态下,250Hz的频率表现更佳。这种差异主要是由于电机反电动势的变化引起的,在调试过程中,模拟真实的工况。
遇到的最困难问题就是处理变负载的应用场景。以机械手为例,当它抓取不同重量的物体时,我们设计了一套自动频率调整的。该能够依据电流反馈实时调整PWM参数,使得抓取的成功率得以稳定在99.8%。这个后来被广泛采纳,成为了标准配置功能。
软件滤波的妙用
在控制器上应用移动平均滤波技术,可以有效降低角度的抖动幅度,减少40%。一位热衷于航模制作的客户对此功能表示高度满意,他提到,使用该功能后,他的固定翼飞机不再出现舵面微颤的现象。建议将滤波窗口的大小设置为5至7个采样点,以在实时性和平滑度之间取得平衡。
还注意到一个有趣的现象,即在PWM信号中加入1%的白噪声,竟然能提升低速运动时的稳定性。其原理在于打破了静摩擦力的平衡状态,这一方法在精密仪器进行定位时尤为有效。然而,需要注意的是,噪声的幅度严格控制,因为过大的噪声反而可能引发新的震动。
在使用过程中,大家是否遭遇过由PWM频率引发的特定难题?欢迎各位分享你们的实战心得。


















 151
151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









