




 本笔记详细介绍了3D点云处理课程中的3D对象检测,涵盖VoxelNet、PointPillars、PointRCNN等方法。讨论了基于图像、体素、点云融合的深度学习理论,并提及了数据预处理、数据增广和损失函数优化策略。
本笔记详细介绍了3D点云处理课程中的3D对象检测,涵盖VoxelNet、PointPillars、PointRCNN等方法。讨论了基于图像、体素、点云融合的深度学习理论,并提及了数据预处理、数据增广和损失函数优化策略。
课程笔记-三维点云处理06 ——3D Object Detection(下)
本系列笔记是对深蓝学院所开设的课程:《三维点云处理》的笔记 课程每周更新,我也会努力将每周的知识点进行总结,并且整理成笔记发上来,欢迎各位多多交流&批评指正!!
本文主要为课程第六章的笔记! 由于第六章继续进行深度学习领域知识讲解,因此不仅知识量陡增,课程量也加大,因此本章将分为上下两篇笔记进行记录。
本息可主要讲3D物体感知的昂发,介绍基于图像的、基于体素和点云的、以及基于融合的3D物体感知深度学习方法及经典理论
课程链接:
三维点云处理——深蓝学院
正式内容:
####################################################
本节课大纲:
############################################################
VoxelNet, PointPillars
对于三维数据的处理方式有以下四种:
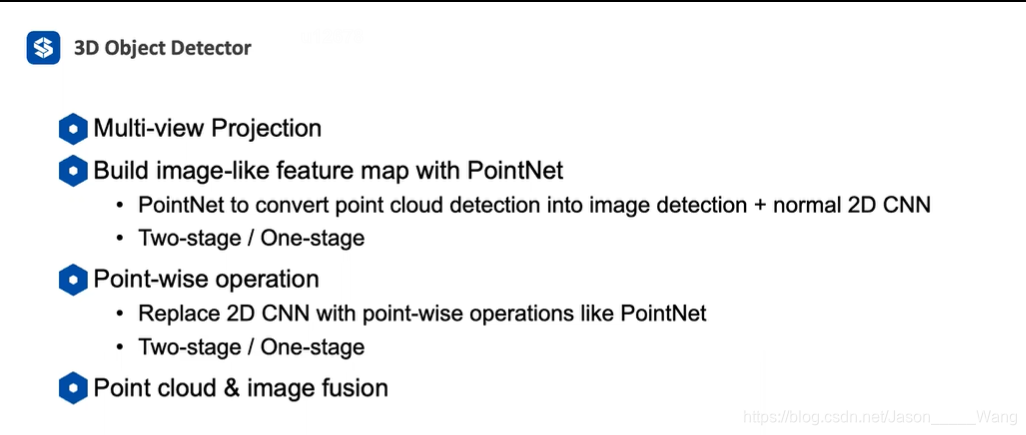
多为结合2D的神经网络思想与方法,主要都是1stage和2stage方法,主要主干为基于图像的CNN解决方法和pointnet 的直接解决方法。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









