



1、在MATLABC具箱里,有特别提供的函数reg()来求解LQGR优控制。函数的调用
格式为:
rsys = reg(sys K,L)
其中,输入参量sys为系统的状态空间模型;K为由函数lqr()求得的最优状态反馈增
益矩阵;L为函数lqe()求得的Kalman滤波器状态估计增益矩阵。
2、函数lqr()
K = lqr(A,B,Q,R) %状态反馈控制增益矩阵
% 新的状态空间模型
Ac = [(A-BK)]
Bc = [B]
Cc = [C]
Dc = [D]
sys_cl = ss(Ac,Bc,Cc,Dc) %系统函数建立
%常用的响应输出格式
%t = 0:0.01:5;
%r =0.2ones(size(t));
%[y,t,x]=lsim(sys_cl,r,t);
%[AX,H1,H2] = plotyy(t,y(:,1),t,y(:,2),‘plot’);
%set(get(AX(1),‘Ylabel’),‘String’,‘cart position (m)’)
%set(get(AX(2),‘Ylabel’),‘String’,‘pendulum angle (radians)’)
%title(‘Step Response with LQR Control’)
3、care函数(里卡蒂方程
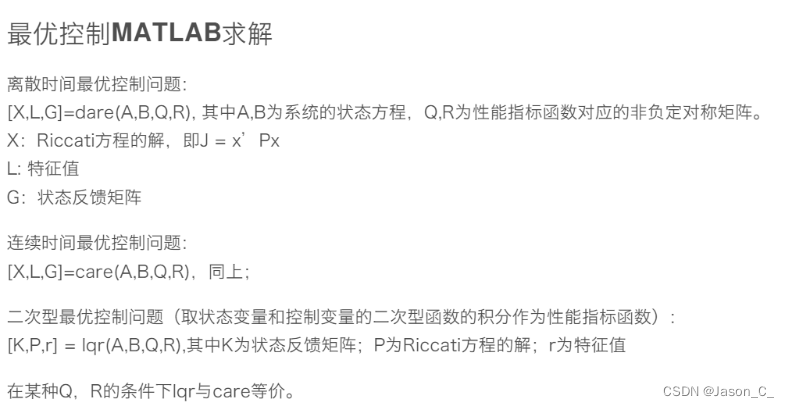
4、lqe函数
Matlab里的LQG最优控制函数(reg),lqr(里卡蒂)最优状态反馈,(lqe)卡尔曼滤波控制器函数
最新推荐文章于 2025-10-12 11:41:17 发布
 该博客介绍了MATLAB中用于LQG最优控制的reg函数,详细阐述了其使用方法,包括将状态反馈增益矩阵K和Kalman滤波器状态估计增益矩阵L作为输入参数。同时,解释了lqr函数如何计算最优控制增益,并展示了如何构建新的状态空间模型。此外,提到了care函数和lqe函数在里卡蒂方程解决中的作用,整体内容聚焦于控制系统理论和MATLAB应用。
该博客介绍了MATLAB中用于LQG最优控制的reg函数,详细阐述了其使用方法,包括将状态反馈增益矩阵K和Kalman滤波器状态估计增益矩阵L作为输入参数。同时,解释了lqr函数如何计算最优控制增益,并展示了如何构建新的状态空间模型。此外,提到了care函数和lqe函数在里卡蒂方程解决中的作用,整体内容聚焦于控制系统理论和MATLAB应用。

















 2237
2237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









