软件设计师20--作业管理
最新推荐文章于 2024-04-05 13:07:04 发布





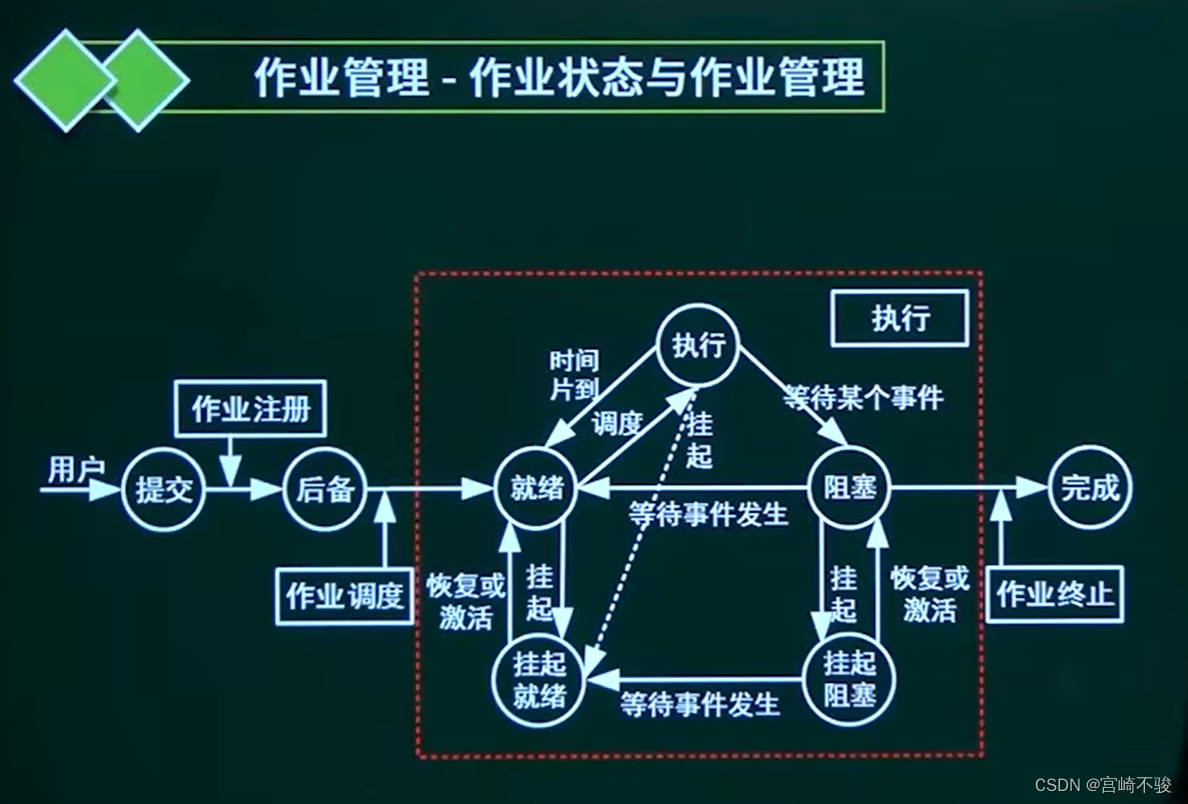
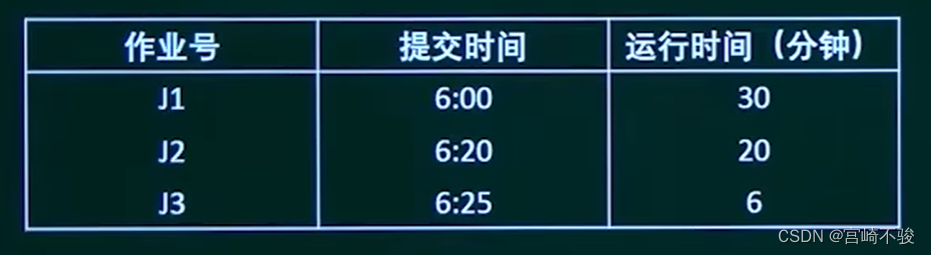
 本文介绍了软件设计师作业管理中的两个关键考点:作业状态与作业调度算法,包括先来先服务、时间片轮转、短作业优先等方法,重点讲解了高响应比优先法,并通过例题演示其应用,如作业J1、J2、J3的调度顺序问题。
本文介绍了软件设计师作业管理中的两个关键考点:作业状态与作业调度算法,包括先来先服务、时间片轮转、短作业优先等方法,重点讲解了高响应比优先法,并通过例题演示其应用,如作业J1、J2、J3的调度顺序问题。
本文介绍了软件设计师作业管理中的两个关键考点:作业状态与作业调度算法,包括先来先服务、时间片轮转、短作业优先等方法,重点讲解了高响应比优先法,并通过例题演示其应用,如作业J1、J2、J3的调度顺序问题。
本文介绍了软件设计师作业管理中的两个关键考点:作业状态与作业调度算法,包括先来先服务、时间片轮转、短作业优先等方法,重点讲解了高响应比优先法,并通过例题演示其应用,如作业J1、J2、J3的调度顺序问题。
 2万+
9993
807
4万+
2万+
9993
807
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言