






📺 B站视频讲解(Bilibili):https://www.bilibili.com/video/BV1k1C9BYEAB/
📘 《Yocto项目实战教程》京东购买链接:Yocto项目实战教程
YOLO 模型版本演进全解析:从 v1 到 YOLO11(含最新模型核心差异与实战建议)
本文面向需要在实际项目中部署目标检测模型的工程人员,系统梳理 YOLO 系列的演进脉络,并重点讲清当下主流版本(YOLOv5 ~ YOLO11)的核心设计、优缺点与适用场景。配合表格与结构示意,帮助快速做出“该用哪一版 YOLO”的技术决策。
一、YOLO 家族的整体时间线与定位
先给出一张“鸟瞰图”,从时间顺序和主要贡献角度,快速建立整体印象。
1.1 时间线总览
| 阶段 | 代表版本 | 大致年份 | 核心关键词 | 主要贡献 |
|---|---|---|---|---|
| 初代阶段 | YOLOv1 ~ v3 | 2015 ~ 2018 | 端到端、实时检测 | 统一网络、单阶段检测,奠定 YOLO 基础思想 |
| 过渡阶段 | YOLOv4 | 2020 | Trick 集成、工程增强 | 系统性整合训练技巧,显著提升精度 |
| 工程化阶段 | YOLOv5 | 2020 | PyTorch 实现、部署友好 | 提供完整工程框架与导出体系,成为业界“默认基线” |
| 工业优化阶段 | YOLOv6 / v7 | 2022 | 工业推理优化、高精度 | 面向工业部署与学术 SOTA 的两条路线 |
| 统一框架阶段 | YOLOv8 | 2023 | 全任务一体化 | 检测、分割、姿态、分类统一在同一仓库和 API 下 |
| 学术创新阶段 | YOLOv9 | 2024 | 新型 Backbone / FPN | 通过 GelAN、PAFPN 等结构进一步追求高精度 |
| 端到端优化阶段 | YOLOv10 | 2024 | NMS-Free、时延最优 | 引入无 NMS 端到端检测头,极致压缩推理延迟 |
| 综合最优阶段 | YOLO11 | 2024 末 | 精度/速度/部署全面平衡 | 在同等延迟下提供更高 mAP,成为新一代默认选择 |
可以看到,早期 YOLO 解决“如何做实时检测”,后期的各个版本则在**“精度”“速度”“工程可用性”“部署难度”**之间不断平衡和优化。
二、从“一个 YOLO”到“一个家族”:早期 YOLO 的思想基底
这一部分不用过多细节,只强调 YOLO 在目标检测领域引入了哪几个关键“观念”,后面才好理解为什么各个版本虽然结构不同,但仍然被称为 YOLO。
2.1 YOLO 的核心思想
用一句话概括:
YOLO = 把整张图当成一个整体,一次性预测所有候选框和类别。
与两阶段检测器(Faster R-CNN 等)相比,YOLO 强调:
- 单阶段(Single-stage):网络一次前向就给出预测,不再分 Proposal 阶段和分类阶段;
- 端到端(End-to-end-ish):输入图像 → CNN → 直接输出 bounding boxes 与类别;
- 实时性(Real-time):从设计一开始就关注 FPS,而不是“先追精度,再考虑加速”。
2.2 早期版本的主要演进
| 版本 | 主要特点 | 影响 |
|---|---|---|
| YOLOv1 | 将图像划分为 S×S 网格,每个网格预测固定数量的框和类别 | 证明了“整图统一预测”可以达到不错精度和极高速度 |
| YOLOv2 (YOLO9000) | 引入 Anchor、BatchNorm、更深网络 | 精度显著提升,接近两阶段检测器 |
| YOLOv3 | 使用 FPN 进行多尺度检测,采用 Darknet-53 主干 | 使 YOLO 真正具有工程应用意义 |
YOLOv3 之后,YOLO 已经具备多尺度检测 + 良好的速度,后续版本主要围绕以下几个方向:
- 更高效的主干网络和特征融合结构;
- 更合理的损失函数和标签分配策略;
- 更容易落地的训练 / 部署框架;
- 端到端、低延迟的推理路径优化。
三、YOLOv4:把“所有有效 Trick”塞进来的一代
3.1 YOLOv4 解决什么问题?
YOLOv3 时期,学界与工业界已经积累了大量训练和架构方面的“trick”:
- 更好的数据增广(Mosaic、MixUp 等);
- 各种正则化与归一化方式;
- 改进的损失函数(CIoU、GIoU …);
- 更深更宽的网络结构设计经验。
YOLOv4 的贡献在于:
系统性地把这些成熟的 trick 组合在一起,形成一套“普通显卡也能训练”的工程方案。
3.2 YOLOv4 的结构要点(简版)
- Backbone:CSPDarknet53 → 使用 Cross Stage Partial 结构减轻梯度重复计算;
- Neck:PANet → 强化自底向上的特征传递;
- Head:三尺度预测头 → 对应不同大小目标;
- 训练技巧集合:Mosaic、DropBlock、CIoU Loss、跨 mini-batch 正则等。
YOLOv4 可以看作是YOLOv3 的“满配版”,但框架仍使用 Darknet,工程部署门槛对很多人来说略高。这也为 YOLOv5 出现创造了空间。
四、YOLOv5:从“算法论文”走向“工程标准件”
YOLOv5 常被调侃“没有论文”,但它的意义不在于学术创新,而在于:
第一次提供了从训练、验证、导出到部署的一整套 PyTorch 工程方案。
4.1 YOLOv5 的核心价值
-
框架统一且易用:
- 使用 PyTorch,代码风格清晰;
train.py / val.py / detect.py一条龙脚本;- 数据集配置(YAML)与模型配置(YAML)高度统一。
-
多模型尺寸系列:
n / s / m / l / x五档,从极轻量到高精度,适配不同硬件;- 使用相同结构,只是宽度与深度缩放不同。
-
导出与部署友好:
- 支持导出 ONNX、TensorRT、CoreML 等格式;
- 官方提供不少部署示例,成为许多项目的默认选择。
4.2 YOLOv5 的结构简图
Input
↓
Backbone(CSPDarknet)
↓
Neck(FPN + PAN)
↓
Head(Anchor-based,三尺度)
↓
Boxes + Classes(再经 NMS)
虽然之后出现的 YOLOv8、v9、v10、YOLO11 在结构和精度上都更先进,但在大量已有项目中,YOLOv5 依然是“工程基线”:
- 文档与教程极多;
- 在嵌入式平台(如 Jetson、RK3588)上已经有成熟部署方案;
- 对大多数商业项目而言,“够用而稳定”。
五、YOLOv6 / v7:工业部署与学术 SOTA 的两条分支
虽然现在实际使用上更多人会直接跳到 YOLOv8 之后,但理解 v6/v7 的设计思路,有助于看清 YOLO 家族在“工业化”与“学术性能”之间的分化。
5.1 YOLOv6:工厂里的 YOLO
定位:面向工业场景的高吞吐部署,特别是对 TensorRT、量化等高度优化。
主要特点:
- RepVGG/RepConv 结构:训练时多分支,推理时折叠为单分支,提升速度;
- 标注与样本挖掘针对工业数据进行了大量调优;
- 对 INT8 量化和 TensorRT 部署提供示例。
可以理解为:
YOLOv6 = 针对“工厂流水线 + GPU 服务”的 YOLO 专业版。
5.2 YOLOv7:追求 SOTA 的 YOLO
YOLOv7 的主要目标是:在当时的 COCO 榜单上达到极高 mAP 的同时保持不错速度。
关键点:
- E-ELAN 结构:通过扩展与合并多分支,提升特征表达能力;
- 模型重参数化:类似 YOLOv6 中的思想;
- 引入更复杂的 Label Assignment 与训练策略。
YOLOv7 的问题在于:
- 结构复杂,部署成本相对较高;
- 框架未形成统一生态,后续维护相对有限。
六、YOLOv8:Ultralytics 统一框架的完成体
YOLOv8 标志着 Ultralytics YOLO 进入一个新的阶段:
不再只是“一个检测模型”,而是“一个多任务视觉框架”。
6.1 YOLOv8 的主要特征
-
任务统一:
- 检测(Detect)
- 语义 / 实例分割(Segment)
- 姿态估计(Pose)
- 分类(Classify)
所有任务共享一套命令行 / Python API。
-
结构更新:C2f + 无 Anchor 检测头
-
Backbone 使用 C2f 模块:
- 类似 CSP + Bottleneck 的组合,但更轻量,梯度流更顺畅;
-
Head 采用 Anchor-free 设计:
- 预测中心点偏移与宽高,不再固定预定义 anchor;
- 训练收敛更稳定,迁移到新数据集更容易。
-
训练与部署体验大幅优化:
yolo task=detect/train/val/predict/export一条命令搞定;- 支持多种后端:TensorRT、ONNX Runtime、OpenVINO、CoreML 等;
- 官方文档极为详细,示例清晰。
6.2 YOLOv8 与 YOLOv5 的对比表
| 维度 | YOLOv5 | YOLOv8 |
|---|---|---|
| 主干结构 | CSPDarknet 系列 | C2f 系列,更轻量 |
| 检测头 | Anchor-based | Anchor-free |
| 任务支持 | 以检测为主,分支版本支持分割等 | 原生支持 检测/分割/姿态/分类 |
| API 设计 | 脚本化为主 | 统一 CLI + Python API |
| 导出/部署 | ONNX/TensorRT 等 | 支持更多后端且集成更好 |
在实际工程中,如果没有“历史包袱”,YOLOv8 往往是比 v5 更推荐的起点。
七、YOLOv9:为了更高精度的结构创新
YOLOv9 的目标非常明确:在保持相对可接受速度的前提下,进一步推高 mAP。
7.1 关键技术点
-
GelAN Backbone:
- 通过全局表达式学习和更强的特征交互,增强主干的表达能力;
- 设计上更偏向“学术 SOTA 型”主干,而非极致轻量化。
-
PAFPN-FPN 改进特征金字塔:
- 在传统 FPN/PAN 之上叠加更深的跨尺度连接;
- 进一步提升小目标与复杂场景的检测能力。
-
蒸馏与多 Loss 策略:
- 引入新的蒸馏方式,在训练中用大模型指导小模型;
- 使用更合理的边框与分类损失组合。
7.2 YOLOv9 的取舍
- 优点:在 COCO 等数据集上可以获得比 YOLOv8 更高的 mAP;
- 缺点:结构更复杂,推理速度略慢,对部署环境要求更高。
在需要极致精度、服务器推理、离线计算等场景,YOLOv9 是一个值得考虑的版本。但在嵌入式实时场景中,YOLOv8 / YOLO10 / YOLO11 更常见。
八、YOLOv10:走向端到端与 NMS-Free
在此之前的所有 YOLO 版本都有一个共性:
推理最后一步都要经过 NMS(非极大值抑制)来去重框。
NMS 虽然简单有效,但存在几个问题:
- 需要逐框比较,耗时不可忽视;
- 算法本身是启发式的,不可微,与训练过程不完全一致;
- 在硬件上实现高效 NMS 有一定复杂度。
8.1 YOLOv10 的核心思路
YOLOv10 的核心在于:
通过设计新的检测头和训练策略,使模型在推理时可以直接输出“已经去重好”的框,从而不再需要显式的 NMS。
简化后的推理流程可以画成:
Input → Backbone → Neck → Head(NMS-Free)→ 直接得到 final boxes + classes
8.2 YOLOv10 带来的收益
- 更低延迟:省去了 NMS 的额外耗时,尤其在小模型和高分辨率场景下,收益明显;
- 更统一的端到端训练范式:输出与损失更紧密地绑定,训练 / 推理逻辑更一致;
- 对硬件部署更友好:减少后处理逻辑,适合在专用 NPU 或 FPGA 上实现。
8.3 使用建议
- 若你的应用对时延非常敏感(如手机端、穿戴设备、嵌入式摄像头实时识别),YOLOv10 是一个值得优先评估的版本;
- 若更看重框架成熟度与生态完备度,则可以考虑直接过渡到 YOLO11(兼顾精度与速度)。
九、YOLO11:当前综合最优的 YOLO 版本
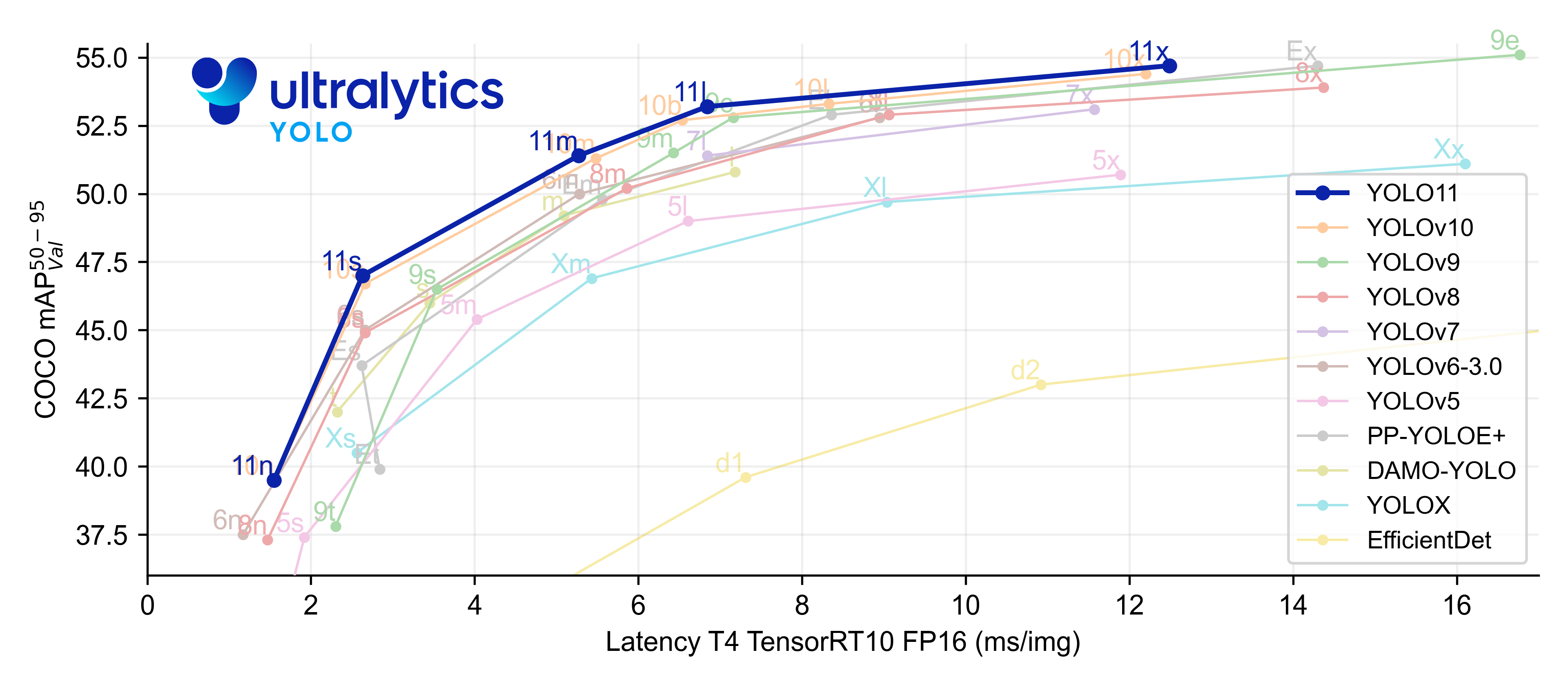
在你给出的性能图中,可以清楚看到:
- 在相同的 TensorRT FP16 延迟下,YOLO11 系列(n/s/m/l/x)整体 mAP 曲线最高;
- 说明它在 Backbone、Neck、Head、训练策略、推理结构 等多个层面都有协同优化。
下面重点讲 YOLO11 的几个“核心升级点”。
9.1 设计目标:不是单点最强,而是“全面平衡”
YOLO11 的设计出发点可以概括为:
在工程可用前提下,把精度/速度/易部署三个指标同时推到一个新的平衡点。
具体而言:
- 维持 n/s/m/l/x 多尺度系列,以适配不同硬件;
- 保持与 Ultralytics 框架的高度兼容(与 YOLOv8 命令行和 API 一致或相近);
- 在主干与检测头上进行结构升级,以提升同等延迟下的 mAP。
9.2 结构层面的关键优化(概念性说明)
由于官方并不总是完全公开最细节的实现,这里按照公开信息和代码结构做一个“概念级”说明,重点理解思想而非逐层记忆。
-
Backbone:更高效的特征提取模块
- 在 C2f 思路基础上进一步改进卷积块结构;
- 对深度可分离卷积、注意力机制等做了工程权衡(只在收益明显处使用);
- 更好地平衡了小模型与大模型的深度/宽度。
-
Neck:更合理的特征金字塔
- 对 YOLOv8 的 FPN/PAN 结构进行调整,使得不同层级特征在融合时信息损失更小;
- 针对小目标 / 大场景引入更合适的尺度分配策略。
-
Head:检测头的表达能力与训练稳定性提升
- 延续 anchor-free 思路,但优化了任务解耦方式;
- 通过更好的分类 / 回归分支设计,减轻任务冲突。
9.3 训练与推理策略的改进
YOLO11 在训练层面常见的优化包括(概念级):
- 更合理的 标签分配策略:在正负样本划分和匹配上有更精细的规则;
- 强化 数据增广策略组合:使模型泛化性更好,但不过度破坏语义;
- 调整 损失函数权重:更关注难样本与边界样本;
- 对 蒸馏训练、多尺度训练 等进行工程优化。
在推理层面:
- 对 TensorRT / ONNX 的图结构更友好,减少不必要的算子;
- 对批量推理和流式推理都做了相应优化。
9.4 YOLOv8 / v9 / v10 / YOLO11 的对比表
| 维度 | YOLOv8 | YOLOv9 | YOLOv10 | YOLO11 |
|---|---|---|---|---|
| 定位 | 统一框架、易用 | 更高精度 | NMS-Free、低延迟 | 综合最优(精度 + 速度 + 工程) |
| Backbone | C2f 系列 | GelAN 等新结构 | 在 v8 上优化 | 在 v8 思路基础上全面升级 |
| Head | Anchor-free | Anchor-free + 策略增强 | NMS-Free Head | 更高效的 Anchor-free Head |
| 训练侧重 | 易上手、泛化 | 追求最高 mAP | 端到端一致性 | 兼顾精度与实际部署表现 |
| 适用场景 | 通用业务 | 服务器高精度 | 边缘实时、极低时延 | 新项目首选 / 希望长期维护的方案 |
在实际选型时,如果不考虑历史包袱:
- 通用检测 + 希望长期维护 → YOLO11;
- 特别关注延迟 → YOLO10 / YOLO11-n/s;
- 已有 v5/v8 项目 → 视情况平滑升级到 YOLO11 对应尺寸。
十、从“图”看差异:精度-速度折中曲线
在 Ultralytics 给出的性能对比图中,横轴是 T4 + TensorRT FP16 推理延迟(ms/img),纵轴是 COCO mAP50-95。图中包含 YOLOv5 ~ YOLO11 以及 PP-YOLOE+、YOLOX、EfficientDet 等模型。
10.1 如何解读这张图?
-
每一组型号(如 11n、11s、11m、11l、11x)在同一条曲线(蓝线)上:
- 说明 YOLO11 在不同体量下,都具有良好的一致性;
-
同等延迟下,YOLO11 的 mAP 普遍高于 YOLOv8、v9、v10:
- 体现了结构优化的有效性;
-
EfficientDet 曲线明显偏低:
- 说明该系列在当前环境下已经不具优势;
-
PP-YOLOE+、YOLOX 等虽表现不错,但整体略逊于 YOLO11:
- 在“统一框架 + 部署友好 + 持续维护”维度上,YOLO11 也更有优势。
10.2 一个简化的“选型流程图”
需要极致低延迟?
/ \
是 否
/ \
硬件资源有限? 更关注精度 / 生态?
/ \ / \
是 否 是 否
/ \ / \
YOLO10-n/s YOLO11-n YOLO11-s/m YOLOv9(或更大 YOLO11)
这个流程图可以根据你的课程或项目需要进行简化或扩展,用于在 PPT 中指导学生或团队做出版本选择。
十一、工程视角:如果现在要做一个新项目,该用哪一版 YOLO?
从一个工程实践者的角度,到 2024~2025 年,YOLO 的版本选择可以粗略归纳为:
-
新项目 / 无历史兼容压力:
- 优先考虑 YOLO11;
- 若对超低延迟有极端要求,则评估 YOLO10。
-
已有 YOLOv5 项目,考虑升级:
- 可直接对齐模型尺寸,如 v5s → 11s,v5m → 11m 等;
- 在同样硬件与推理框架下,一般可以获得更高精度或更低时延。
-
对精度要求极高、运行环境偏服务器:
- 可评估 YOLOv9 或较大尺寸的 YOLO11(如 11l/x)。
-
资源极度受限的 MCU / DSP / 特定 NPU 场景:
- 需要结合厂商提供的模型或自行剪枝量化;
- YOLO 家族中可优先尝试 11n / 8n 等最小模型,再配合 NAS / 剪枝。
十二、小结:用三层视角记住 YOLO 的演进
最后,用一个“三层结构”来帮助记忆 YOLO 的发展路径:
12.1 概念层:YOLO 的不变之处
- 始终是 单阶段目标检测器;
- 始终强调 实时性 与 端到端;
- 始终追求 精度 与 速度 的平衡。
12.2 架构层:不断变化的地方
- 主干网络从 Darknet → CSP 系列 → C2f / GelAN / YOLO11 新结构;
- 特征金字塔从 FPN → PAN → 更复杂的 PAFPN、BiFPN 等变体;
- 检测头从 Anchor-based → Anchor-free → NMS-Free。
12.3 工程层:越来越重要的维度
- 从 Darknet 框架到 PyTorch/Ultralytics 完整工具链;
- 从只支持检测,到统一支持分割、姿态、分类;
- 从单一 GPU 推理,到适配 Jetson、RK3588、NPU、手机等多平台部署。
结语
YOLO 从最初只是一个“能实时跑的目标检测算法”,发展到今天,已经演变成一个兼顾学术与工业的完整家族:
- 早期版本证明了理念的可行;
- 中期版本把各种技巧整合进工程框架;
- 最新一代(YOLOv8 ~ YOLO11)则重点解决统一框架、部署友好与端到端优化问题。
在当下这个时间点,如果你准备启动一个新的检测项目,希望在未来几年内持续维护并跟进最新生态,那么:
把 YOLO11 作为默认起点,结合实际硬件选择合适的模型尺寸,是一个兼顾风险与收益的理性方案。
后续如果需要,我可以进一步:
- 针对 Jetson / RK3588 等平台,给出 YOLO11 的具体部署流程和性能预估;
- 画出更细节的结构示意图,用于课程 PPT 或内部培训;
- 根据你的业务场景(摄像头分辨率、FPS、目标大小)推荐具体的模型尺寸与前后处理策略。
📺 B站视频讲解(Bilibili):https://www.bilibili.com/video/BV1k1C9BYEAB/
📘 《Yocto项目实战教程》京东购买链接:Yocto项目实战教程

















 1244
1244

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









