



 博客介绍了Android SDK的下载方法。官网已无单独SDK安装包,推荐下载含SDK的Android Studio,但官网下载需翻墙且安装包大。也可去国内Android工具下载网站,点击相关按钮选择适合版本下载,最后要在环境里配置SDK。
博客介绍了Android SDK的下载方法。官网已无单独SDK安装包,推荐下载含SDK的Android Studio,但官网下载需翻墙且安装包大。也可去国内Android工具下载网站,点击相关按钮选择适合版本下载,最后要在环境里配置SDK。
下载android Sdk
1.通过翻墙工具 下载sdk
目前官网上已经没有单独的SDK下载安装包了。目前官网推荐的是下载包含有Android SDK的Android Studio。sdk官网
Android Studio 的一个功能非常强大的用来做安卓开发试调的官方出品的工具。Ps:官网下载,需科学(翻)上(墙)网
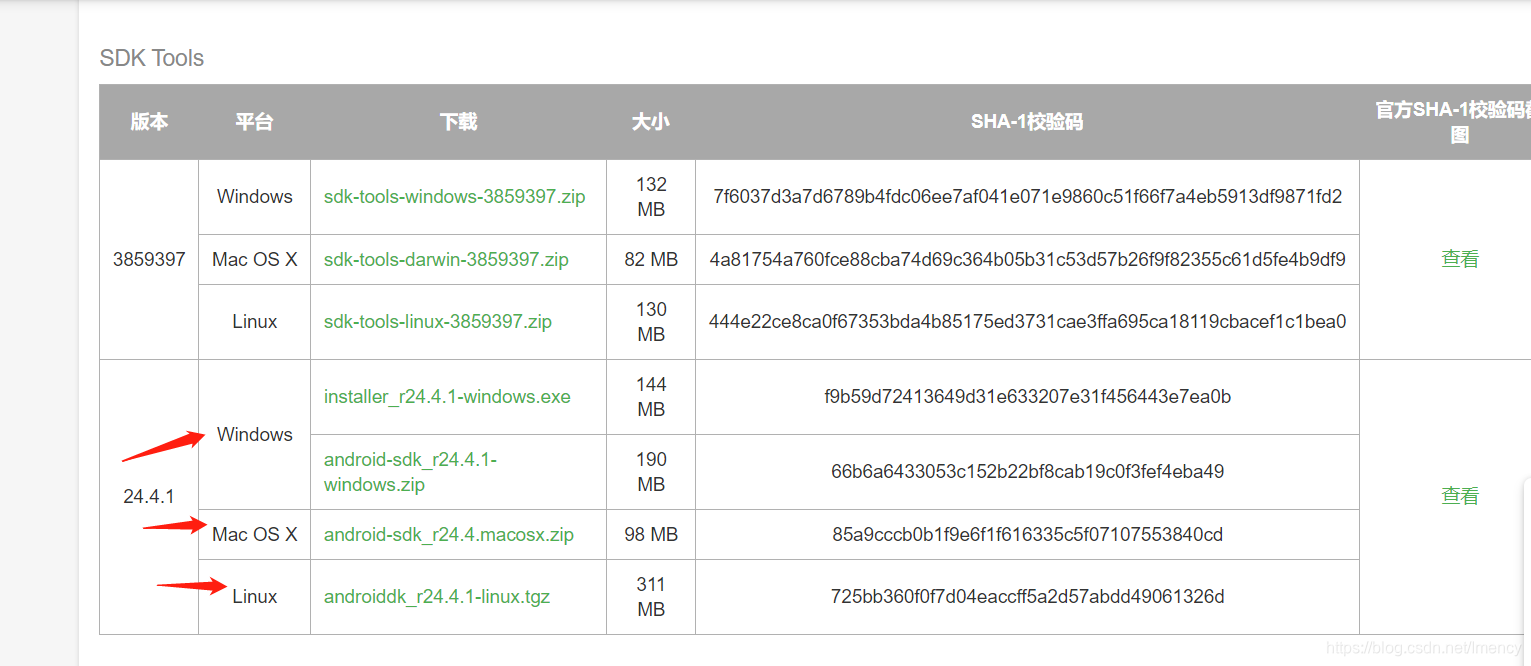
2.由于这个Android Studio 的安装包过大且官网下载需要翻墙,而咱们在用Appium 的时候实际上只需要用到SDK 工具而已。所以推荐大家去另外一个国内的Android 工具的下载网站下载。这里
进入页面后点击【Android SDK 工具】按钮,然后在弹出的选择框内点击【SDK Tools】按钮,然后界面会自动跳转到SDK 的下载界面,选择适合自己的版本进行下载

打开生成的Android
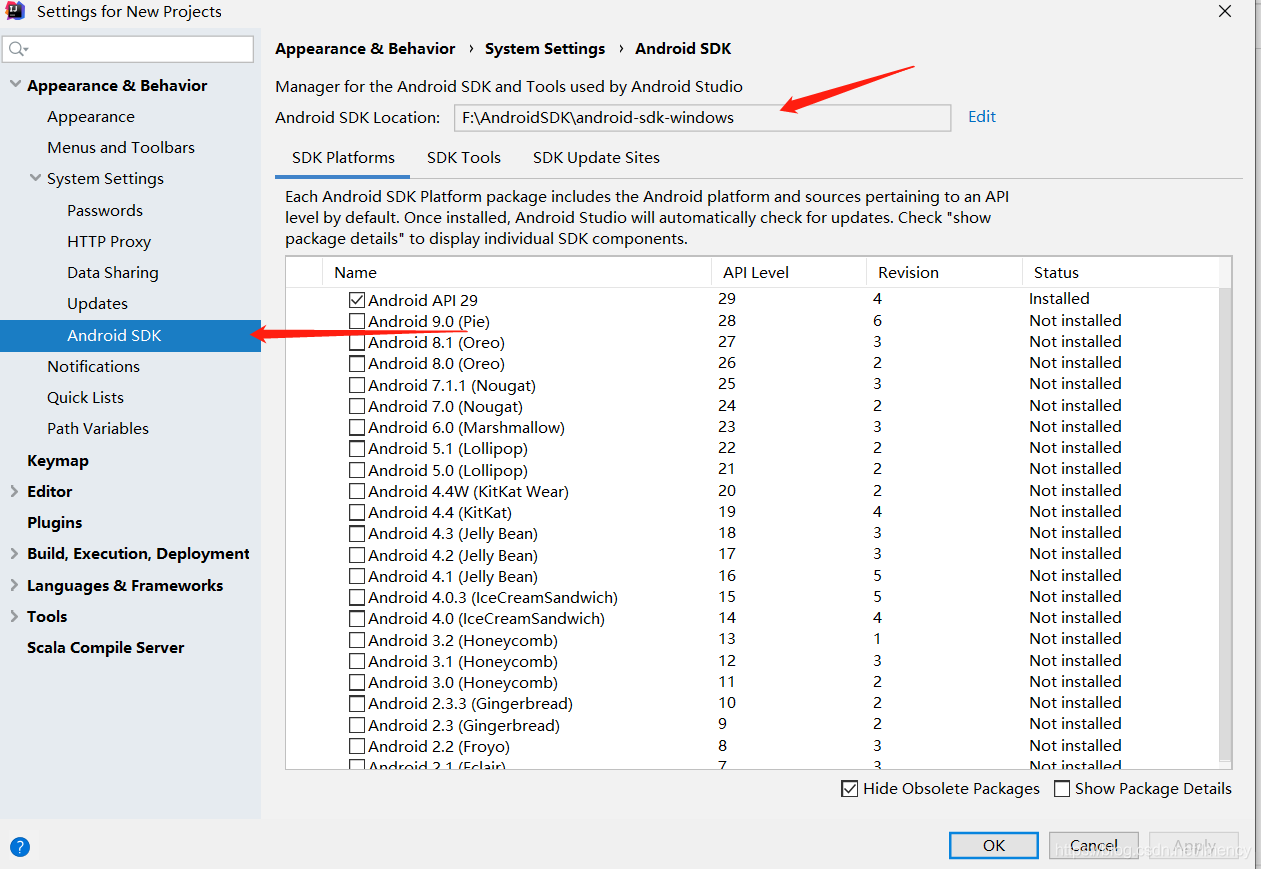
在环境里配置sdk
等待下载完成


















 2762
2762

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











