




 本文详细介绍了一种从二进制文件中读取并解析GPS数据的方法,包括定位数据起始位置、解析Wi-Fi信息、提取GPS帧头、时间、经纬度及航向角等关键信息。
本文详细介绍了一种从二进制文件中读取并解析GPS数据的方法,包括定位数据起始位置、解析Wi-Fi信息、提取GPS帧头、时间、经纬度及航向角等关键信息。
#include"common.h"
int main()
{
int num = 0;
int fd = -1;
int ret = -1;
char buf[1024];
unsigned char gps_buf[512];
int count = 1;
fd = open("./0.bin",O_RDONLY);
if(fd < 0)
{
perror("open");
return -1;
}
char *p =(char*)malloc(4096);
ret = read(fd,p,4096);
if(ret < 0)
{
perror("read");
return -1;
}
/*找出开始的位置*/
while(*p)
{
if(*p=='+')
{
p=p+10;
num += 10;
break;
}
else
{
p++;
num++;
}
if(num>=4096)return -1;
}
/*解析出每个wifi*/
while(*p)
{
int i = 0;
bzero(buf,1024);
if((*p++=='O')&&(*p++)=='K')
{
printf("进入GPS 。。。\n");
break;
}
while(*(p++)!=',');
while(1)
{
if(*p=='\r')
{
buf[i]='\0';
printf("%d:%s\n",count,buf);
p=p+2;
count++;
break;
}
else
{
buf[i]=*p;
i++;
p++;
}
}
}
p=p+2;
bzero(gps_buf,512);
memcpy(gps_buf,p,512);
/*提取帧头 4Byte*/
int *h_num;
int head;
h_num = (int*)(gps_buf+0);
head = *h_num;
head = htonl(head);
printf("head: %x\n",head);
/*提取有效位 1Byte*/
unsigned char*time_place_valid;
time_place_valid = (unsigned char*)(gps_buf+4);
printf("time_place_valid: %x\n",*time_place_valid);
/*提取时间 6Byte*/
char *g_year,*g_month,*g_day,*g_hour,*g_min,*g_sec;
g_year = (unsigned char*)(gps_buf+5);
g_month = (unsigned char*)(gps_buf+6);
g_day = (unsigned char*)(gps_buf+7);
g_hour = (unsigned char*)(gps_buf+8);
g_min = (unsigned char*)(gps_buf+9);
g_sec = (unsigned char*)(gps_buf+10);
printf("%d/%d/%d-%d:%d:%d\n",*g_year,*g_month,*g_day,*g_hour,*g_min,*g_sec);
/*提取经度 9Byte*/
unsigned char *l_num;
/*检验东西经 1Bit*/
int num_j = 0x80;
l_num = (unsigned char*)(gps_buf+11);
unsigned char lo_j = (*l_num) & (num_j);//判断某一位的数值是多少,就取一个数,并把把该位值置为1,其余置为0,然后再与原数据进行与运算
/*提取经度值*/
unsigned char *l_num2 = (unsigned char*)(gps_buf+12);
num_j = 0x7F;
short longitude_d = ( ((unsigned short)(*l_num) << 8) & ((unsigned short)(num_j)<<8) | (unsigned short)(*l_num2) ); //经度(度) 15Bit
unsigned int longitude2 = (((unsigned char)*(gps_buf+13))<<16) | (((unsigned char)*(gps_buf+14))<<8) | ((unsigned int)*(gps_buf+15)) ;
unsigned char l_buf[20];
bzero(l_buf,20);
sprintf(l_buf,"%d.%d", longitude2/100000, longitude2%100000);
float longitude_m = atof(l_buf); //经度(分) 3Byte
float l ;
l= longitude_d + longitude_m/60;
printf("============= l =%f\n",l);
if(lo_j == 0x80)
{
printf("西经 %d 度 %f分\n", longitude_d, longitude_m);
}
else if(lo_j == 0)
{
printf("东经 %d 度 %f 分\n" ,longitude_d,longitude_m);
}
else
{
printf("error!!!\n");
return -1;
}
/*提取纬度 4Byte*/
l_num = (unsigned char*)(gps_buf+16);
num_j = 0x80;
unsigned char la_j = (*l_num) & (num_j);
unsigned char latitude_d = (*l_num) & (0x7F);
unsigned int latitude2 = (((unsigned int)(*(gps_buf+17)))<<16) | (((unsigned int)(*(gps_buf+18)))<<8) | ((unsigned int)(*(gps_buf+19))) ;
sprintf(l_buf,"%d.%d", latitude2/100000, latitude2%100000);
float latitude_m = atof(l_buf);
if(la_j == 0x80)
{
printf("北纬 %d 度 %f分\n",latitude_d,latitude_m);
}
else if(la_j == 0)
{
printf("南纬 %d 度 %f分\n",latitude_d,latitude_m);
}
else
{
printf("error!!! %x \n",la_j);
return -1;
}
/*航向角有效判断*/
unsigned char *angle_info_valid;
angle_info_valid = (unsigned char*)(gps_buf+20);
printf("航向角有效: %d\n",*angle_info_valid);
unsigned short *angle = (unsigned short*)(gps_buf+21);
int angle2 = *angle;
unsigned int a = htons(angle2);
unsigned char buf2[10];
sprintf(buf2,"%d.%d",a/100,a%100);
float angle_info = atof(buf2);
printf("航向角:%0.2f\n",angle_info);
/*unsigned int *tail=0;
printf("----------%x\n",(unsigned int)(*(gps_buf+26)));
tail = (((unsigned int)(*(gps_buf+23)))<<24) | (((unsigned int)(*(gps_buf+24)))<<16) | (((unsigned int)(*(gps_buf+25)))<<8) | ((unsigned int)(*(gps_buf+26)));*/
int *t_num;
int tail;
t_num = (int*)(gps_buf+23);
tail = *t_num;
tail = htonl(tail);
//printf("head: %x\n",head);
printf("tail: %x\n",tail);
}
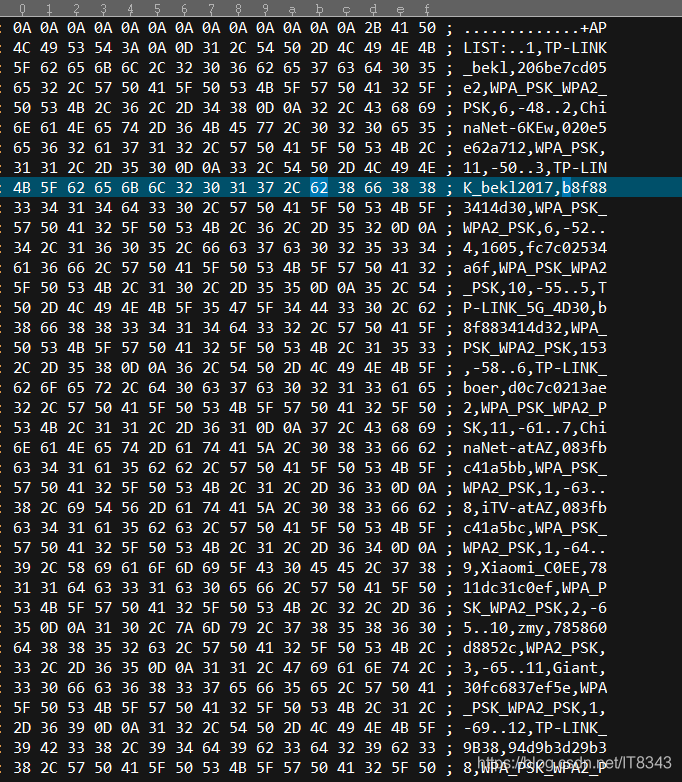
部分原始数据实例:(十六进制)

















 1478
1478

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









