




 本文详细介绍了Java中的节点流和处理流,包括它们的概述、分类、区别(节点流为底层流,处理流包装并增强功能)、以及处理流的主要优势(性能提升和操作便捷性)。
本文详细介绍了Java中的节点流和处理流,包括它们的概述、分类、区别(节点流为底层流,处理流包装并增强功能)、以及处理流的主要优势(性能提升和操作便捷性)。
一、节点流 & 处理流
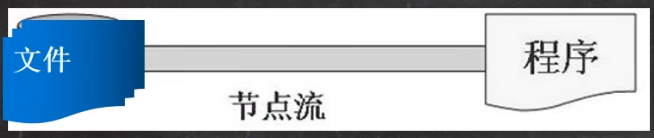
1.1、节点流概述
节点流可以从一个特定的数据源读写数据,例如FileReader、FileWriter。
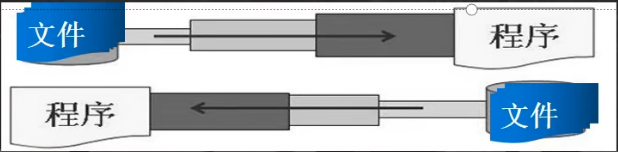
1.2、处理流概述
处理流(包装流)是连接在已存在的流之上,为程序提供更为强大的读写功能,例如BufferedReader、BufferedWriter。
1.3、分类
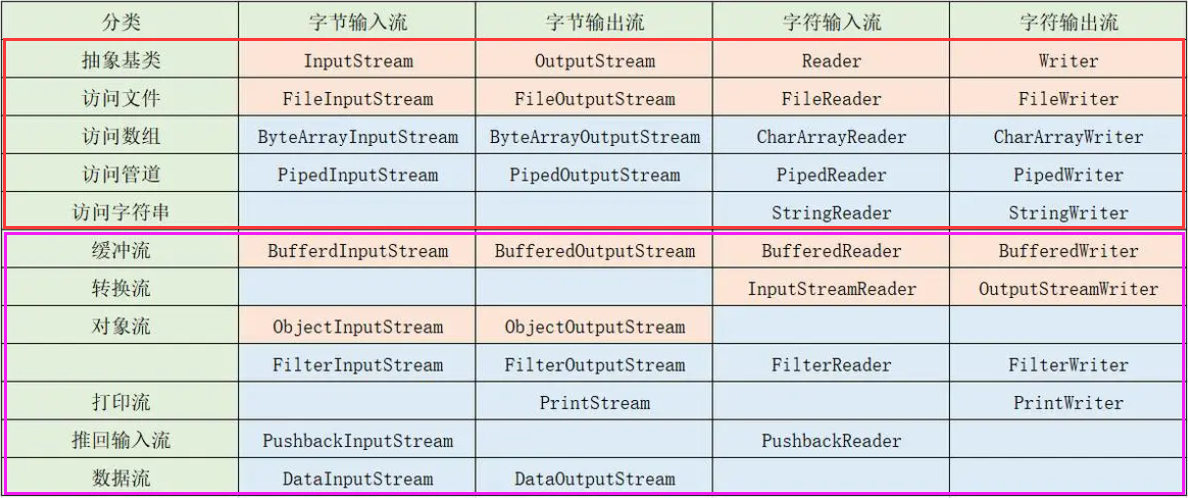
红色框:节点流
紫色框:处理流
1.4、节点流 vs 处理流
(1)节点流是底层流(低级流),直接跟数据源连接;
(2)处理流包装节点流,既可以消除不同节点流的实现差异,又可以提供更方便的方法来完成输入输出;
(3)处理流(包装流)对节点进行包装,使用了修饰器设计模式,不会直接与数据源相连;
1.5、处理流的主要功能
(1)性能的提高:主要以增加缓冲的方式来提高输入输出的效率;
(2)操作的便捷:处理流提供了一些列便捷的方法来一次输入输出大批量的数据,使用更加灵活方便;


















 612
612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









