



加入下方链接班级,得鸿蒙礼盒
本期活动时间:2025年8月1日-12月31日
问题现象
第一次安装应用的时候调用系统定位API失败,并且失败的时候超时时间也很长。具体错误信息如下:
{'code': 3301200, 'message': 'BussinessError 3301200: Failed to obtain the geographical location.'}背景知识
定位思路
- 检查问题代码。
let requestInfo: geoLocationManager.CurrentLocationRequest = { 'priority': geoLocationManager.LocationRequestPriority.FIRST_FIX, 'maxAccuracy': 4 };
return geoLocationManager.getCurrentLocation(requestInfo);- 发现问题。
- 定位过程。
从问题代码可知,参数priority值为geoLocationManager.LocationRequestPriority.FIRST_FIX,而参数maxAccuracy值为4。
根据官方文档的参数说明,系统会对比GNSS或网络定位服务上报的位置信息与应用的位置信息申请。当位置信息Location中的精度值(accuracy)小于等于应用要求的精度值(maxAccuracy)时,位置信息会返回给应用;否则系统将丢弃本次收到的位置信息。
- 建议方案。
根据官方参考文档中的参数说明,当priority设置为LOW_POWER/FIRST_FIX时,可将maxAccuracy设置大于100的值。因此这里建议将maxAccuracy的值设定为100。
- 定位过程。
- 定位结论。
定位失败的原因主要是因为maxAccuracy设置的太小,导致定位坐标被认定为不符合要求而被忽略。
解决方案
- 修改方案。
根据定位结论,需要将maxAccuracy调大,这里按照文档的建议修改为100。
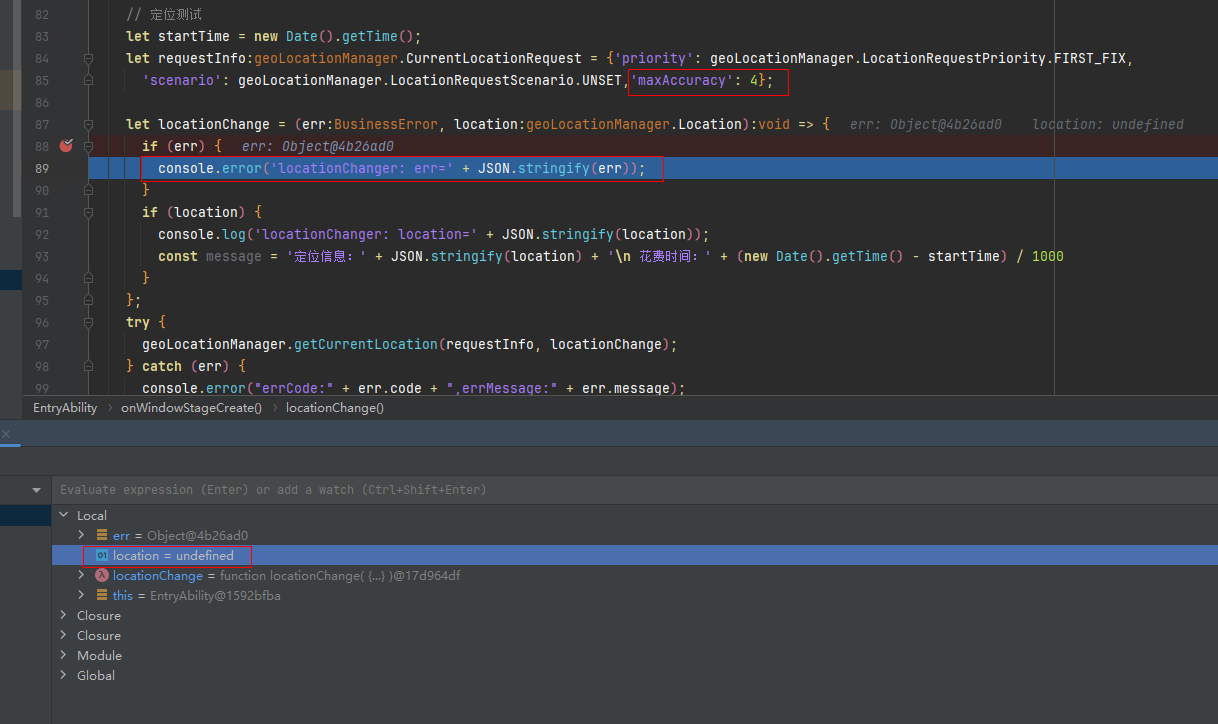
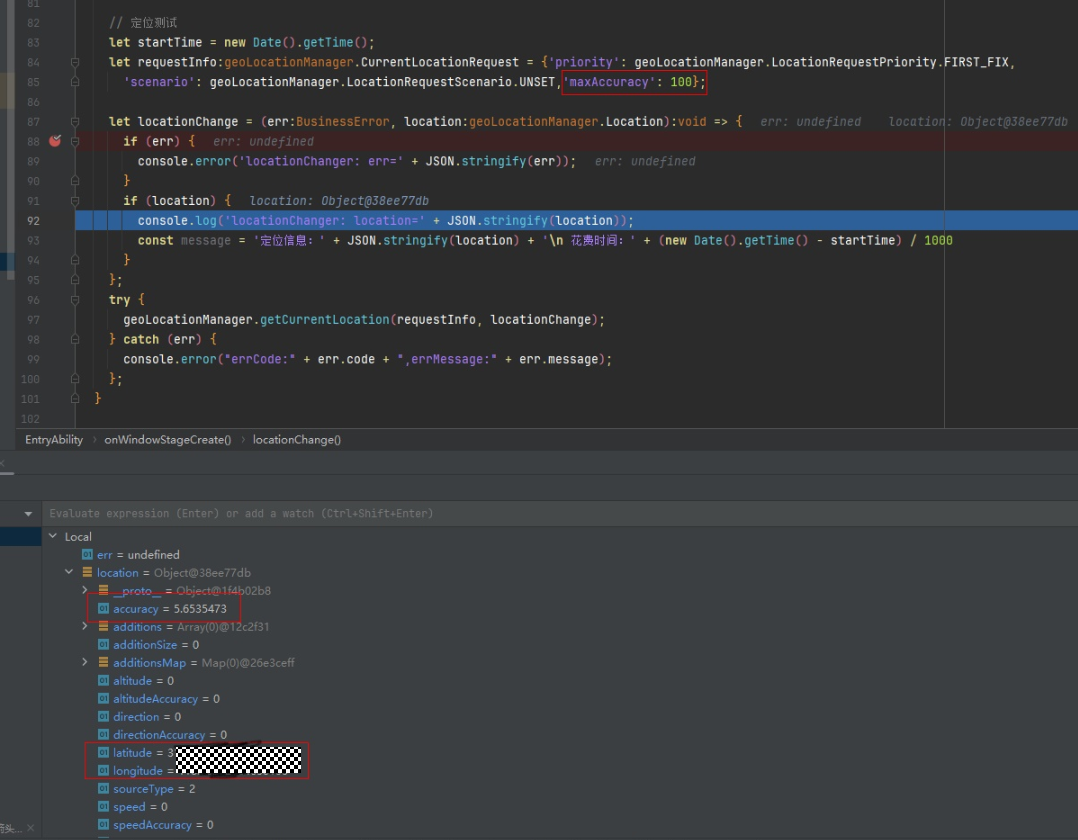
let startTime = new Date().getTime(); let requestInfo: geoLocationManager.CurrentLocationRequest = { 'priority': geoLocationManager.LocationRequestPriority.FIRST_FIX, 'scenario': geoLocationManager.LocationRequestScenario.UNSET, 'maxAccuracy': 100 }; let locationChange = (err: BusinessError, location: geoLocationManager.Location): void => { if (err) { console.error('locationChanger: err=' + JSON.stringify(err)); } if (location) { console.info('locationChanger: location=' + JSON.stringify(location)); this.message = '定位信息:' + JSON.stringify(location) + '\n 花费时间:' + (new Date().getTime() - startTime) / 1000 } }; try { geoLocationManager.getCurrentLocation(requestInfo, locationChange); } catch (err) { console.error('errCode:' + err.code + ',errMessage:' + err.message); }; - 方案验证。
- 修改前,无法正常获取定位信息。
- 修改后,可以正常获取定位信息,并且可见实际accuracy约为5.65。
-
- 修改前,无法正常获取定位信息。

















 917
917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









