




 本文深入探讨了有限状态机(FSM)的概念,详细解释了有限自动机的定义、结构和工作原理,并介绍了确定性有限自动机(DFA)与非确定性有限自动机(NFA)的区别。通过实例展示了NFA到DFA的转换过程,以及如何进行DFA的最小化操作。
本文深入探讨了有限状态机(FSM)的概念,详细解释了有限自动机的定义、结构和工作原理,并介绍了确定性有限自动机(DFA)与非确定性有限自动机(NFA)的区别。通过实例展示了NFA到DFA的转换过程,以及如何进行DFA的最小化操作。
先了解有限状态机(FSM)
编译器就是用有限状态机做词法分析
有限状态机就是一个集合很多状态的机器,根据不同的输入产生不同的状态转变,通过这些状态的转变来体现出每次用户操作的特殊性。状态的产生和改变都是由某种条件成立而出现的
有限自动机(有穷自动机,时序机):
有限自动机M由五元组(X,Y,S,δ,λ)
- X,Y是S的非空有限集
- X:输入集
- Y:输出集
- S:状态集合
- δ:笛卡尔积SxX到S的映射,也叫M的下一状态函数
- λ:SxY到Y的单值映射,也叫M的输出函数
有限自动机 = 内部状态集+控制规则
有限状态机识别字符串:
比如:源代码一个语句为输入字符串,判断其是否能使用有限自动机从初始状态到终状态结束,能,则可以被识别
状态转换图是一个有向图,每个节点表示一个状态,每一个状态转换都对应一个弧
分类:
确定的有限自动机和不确定的有限自动机:
区别:
确定的有限自动机(DFA):
- 开始状态唯一
- 一个输入对应一个状态转换
不确定的有限自动机(NFA):
- 开始状态为一个状态集合
- 一个输入对应多个状态转换
- 有向弧的标记上可以为空
NFA到DFA的转换过程:
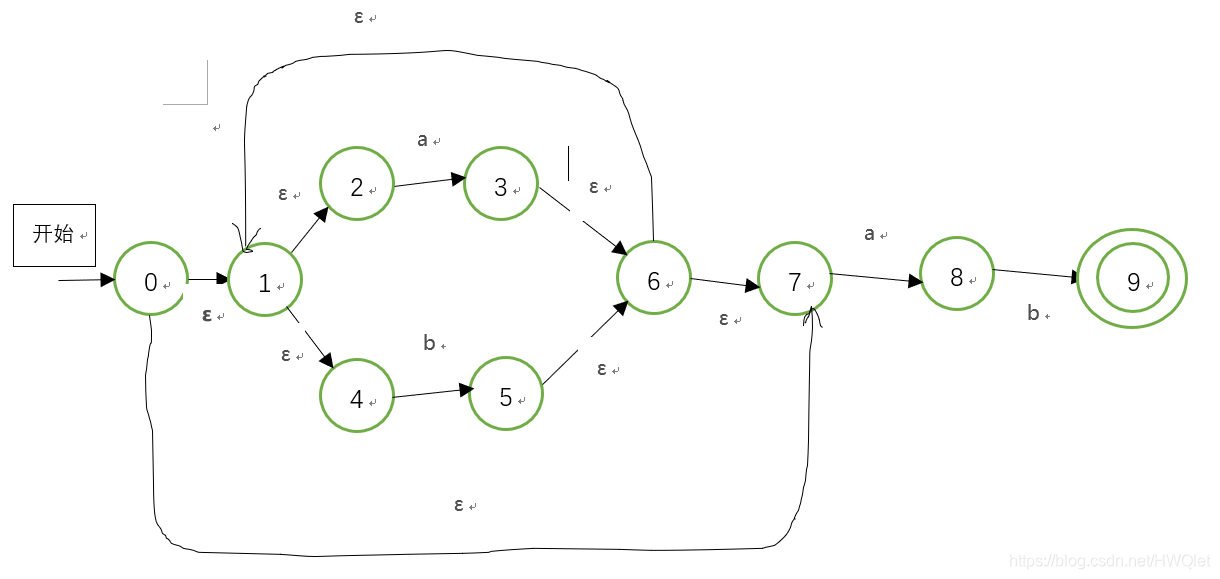
| a | b | ε | |
| 0 | # | # | 1,7 |
| 1 | # | # | 2,4 |
| 2 | 3 | # | # |
| 3 | # | # | 6 |
| 4 | # | 5 | 6 |
| 5 | # | # | 6 |
| 6 | # | # | 1,7 |
| 7 | 8 | # | # |
| 8 | # | 9 | # |
| 9 | # | # | # |
然后我们可以得出ε-closure(s),即从s出发,经由条件ε可以到达的状态集要包括当前状态:
ε-closure(0):{0,1,2,4,7}
ε-closure(1):{1,2,4}
ε-closure(2):{2}
ε-closure(3):{1,2,3,4,6,7}
ε-closure(4):{4}
ε-closure(5):{1,2,4,5,6,7}
ε-closure(6):{1,2,4,6,7}
ε-closure(7):{7}
ε-closure(8):{8}
ε-closure(9):{9}
然后我们需要进行简化,把全新的状态A=ε-closure(0)={0,1,2,4,7}
接着求出状态A经过除了ε条件的其他条件转换得到的状态集,这叫后继状态,后继状态不包括自身
A=ε-closure(0)
ε-closure(move(A,a))=ε-closure({3,8})={1,2,3,4,6,7,8}--->全新的状态集设为=B
ε-closure(move(A,b))=ε-closure({5})={1,2,4,5,6,7}---->全新的状态集设为=C
现在就多了两个新状态B,C
ε-closure(move(B,a))=ε-closure({3,8})={1,2,3,4,6,7,8}---->已有的状态B
ε-closure(move(B,b))=ε-closure({5,9})={1,2,4,5,6,7,9}---->全新的状态集设为=D
ε-closure(move(C,a))=ε-closure({3,8})={1,2,3,4,6,7,8}---->已有的状态B
ε-closure(move(C,b))=ε-closure({5})={1,2,4,5,6,7}---->已有的状态C
ε-closure(move(D,a))=ε-closure({3,8})={1,2,3,4,6,7,8}---->已有的状态B
ε-closure(move(D,b))=ε-closure({5})={1,2,4,5,6,7}---->已有的状态C
至此,没有产生新状态,且每个状态的条件都组合完成
然后画出DFA状态转换表(每个状态只有一个后继状态):
| a | b | |
| A | B | C |
| B | B | D |
| C | B | C |
| D | B | C |
画出状态转换图:
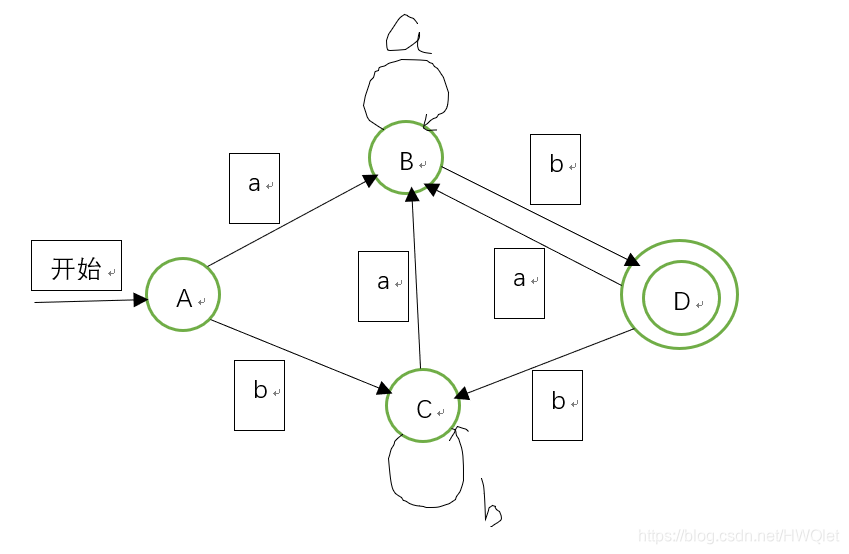
然后进行DFA的最小化:
- 消除多余状态
- 多余状态情况:
- 从这个状态出发没有通路到达终态
- 从开始状态出发,任何输入串都不能到达那个状态(没有一条通路到达那个状态)
- 处理:
- 删除即可
- 多余状态情况:
- 合并等价状态
- 等价状态条件:对于两个可以合并的状态s和t满足以下条件
- 一致性条件:状态s和状态t必须同时为终态或者非终态(终态可以不止一个,开始只有一个)
- 蔓延性条件:对于所有输入符号,状态s和t必须转换到等价的状态里
- 等价状态条件:对于两个可以合并的状态s和t满足以下条件
上面的图可以看出没有多余状态
再看有没有等价状态可以合并:AB,AC,BC都可以合并,但要保证合并之后的状态最少就行
所以合并如下;
| a | b | |
| I(A|B) |
B B |
C D |
| II(C) | B | C |
| III(D) | B | C |
画出合并后的状态转换图:
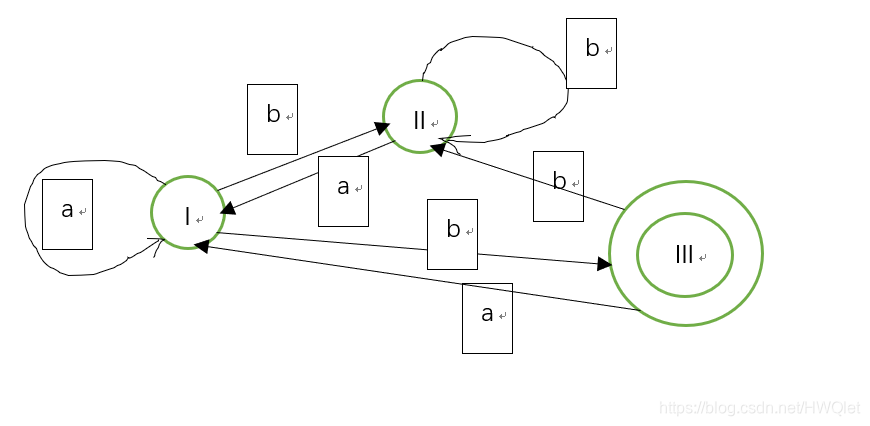
ok了

















 1564
1564

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









