



GraniStudio零代码平台提供超出设计视野时实现数据线连接的处理方式有两种。
第一种方式为可视化缩放画布界面:
1.菜单栏快捷操作
通过菜单栏缩小画布按钮实现,单击按钮即可缩小画布界面,最小支持缩小到0.1倍,最大放大3倍。
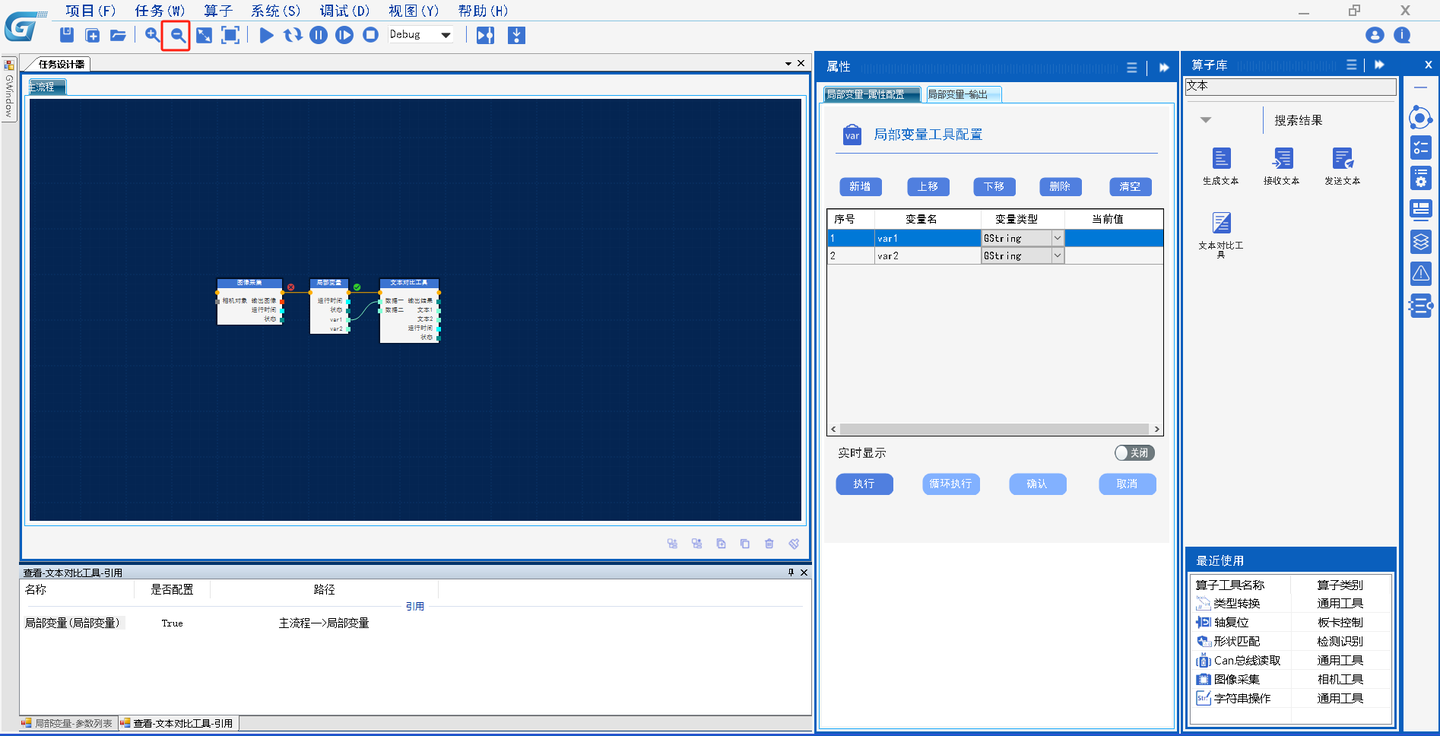
2.键盘鼠标组合:
支持「Ctrl + 鼠标滑轮」的快捷缩放模式,滑轮向后滚动为缩小(向前为放大),最小支持缩小到0.1倍,最大放大3倍。
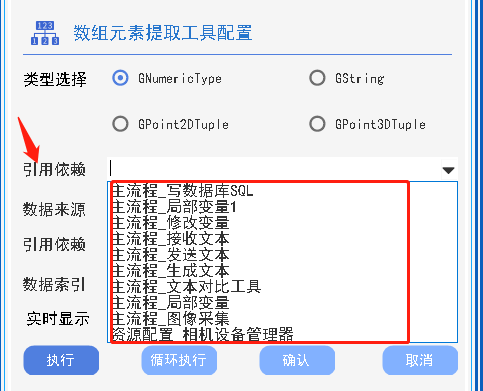
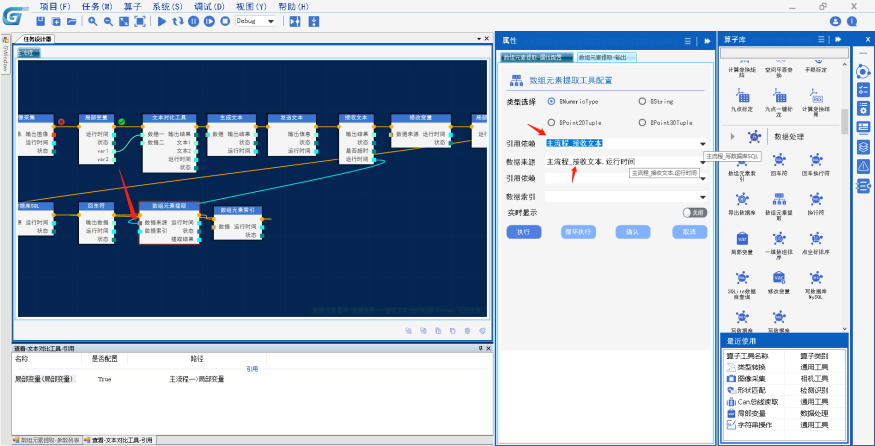
第二种方式是通过打开算子配置界面使用引用依赖框实现数据引用,引用依赖是一个下拉列表形式,在下拉列表中引用依赖包含了算子支持引用的所有算子,数据来源显示支持引用的算子数据,选择完毕后直接画布数据线自动连接到对应算子,例如下图数据元素提取算子引用依赖使用修改变量_运行时间,选择完后画布数据线自动连接。

















 280
280

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









