




 Kappa系数是一种评价分类任务中机器评分与专家评分一致性的指标,尤其适用于离散值的评估。简单Kappa系数通过比较实际一致率和随机一致率来计算,而加权Kappa系数引入了不同错误分类的权重。在3分类的例子中,展示了如何计算Kappa系数,结果显示其为0.5。此外,还提到了PCC相关系数和其在回归问题中的应用。
Kappa系数是一种评价分类任务中机器评分与专家评分一致性的指标,尤其适用于离散值的评估。简单Kappa系数通过比较实际一致率和随机一致率来计算,而加权Kappa系数引入了不同错误分类的权重。在3分类的例子中,展示了如何计算Kappa系数,结果显示其为0.5。此外,还提到了PCC相关系数和其在回归问题中的应用。
kappa检测方法
- 评价相关性的一种指标
- 注意只能计算离散值,不能计算回归问题,如果计算回归问题,必须将值进行离散化
- 这个评价指标经常用在作文评分当中,用来评价机器评分与专家评分的一致性
Simple Kappa Coefficient(简单kappa系数)
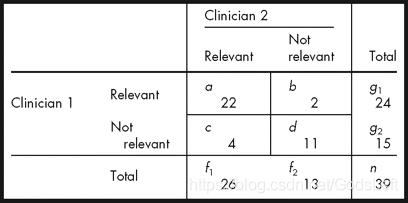
- Clinician 1看做真实分布,Clinician2看做预测分布
- 实际一致率与随机一致率是否有显著的差别
Kappa=Po−Pe1−Pe;Po=a+dn;Pe=(a+b)(a+c)+(c+d)(b+d)n2 Kappa = \frac{P_o - P_e}{1 - P_e}; P_o = \frac{a+d}{n}; P_e = \frac{(a+b)(a+c) + (c+d)(b+d)}{n^2} Kappa=1−PePo−Pe;Po=na+d;Pe=n2(a+b)(a+c)+(c+d)(b+d),其中PoP_oPo实际一致率,PeP_ePe理论一致率 - P0P_0P0比较容易理解,PeP_ePe我们可以拆成a+bn∗a+cn+c+dn∗b+dn\frac{a+b}{n}*\frac{a+c}{n} + \frac{c+d}{n}*\frac{b+d}{n}na+b∗na+c+nc+d∗nb+d
- 其中a+bn∗a+cn\frac{a+b}{n}*\frac{a+c}{n}na+b∗na+c,这个有点类似于交叉熵的概念真实分布概率*预测分布概率
一个3分类的例子:
| 1 | 2 | 3 | |
|---|---|---|---|
| 1 | 4 | 0 | 0 |
| 2 | 0 | 4 | 0 |
| 3 | 0 | 4 | 0 |
上表表明:将类别1分为类别1的个数有4个,将类别2分为类别2的有4个,将类别3分为类别2的有4个
- 对角线元素就是分对的数目:Po=(4+4+0)/12=2/3P_o = (4+4+0)/12 = 2/3Po=(4+4+0)/12=2/3
- 观测一致率:Pe=(4+0+0)∗(4+0+0)122+(0+4+0)∗(0+4+4)122+(0+4+0)∗(0+0+0)122=1/3P_e = \frac{(4+0+0)*(4+0+0)}{12^2} + \frac{(0+4+0)*(0+4+4)}{12^2} + \frac{(0+4+0)*(0+0+0)}{12^2} = 1/3Pe=122(4+0+0)∗(4+0+0)+122(0+4+0)∗(0+4+4)+122(0+4+0)∗(0+0+0)=1/3,
- (为1的行的和 * 为1的列的和) / 样本数目的平方
- (为2的行的和 * 为2的列的和) / 样本数目的平方
- (为3的行的和 * 为3的列的和) / 样本数目的平方
- 最终结果:kappa=Po−Pe1−Pe=2/3−1/31−1/3=0.5kappa = \frac{P_o - P_e}{1 - P_e} = \frac{2/3 - 1/3}{1 - 1/3} = 0.5kappa=1−PePo−Pe=1−1/32/3−1/3=0.5
Weighted Kappa Coefficient(加权Kappa系数)
Kappaw=∑wfo−∑wfen−∑wfe Kappa_w = \frac{\sum wf_o - \sum wf_e}{n - \sum wf_e} Kappaw=n−∑wfe∑wfo−∑wfe
- 为了惩罚分错类别的情况,给不同分错类别的加上不同的权重
- ∑wfo\sum wf_o∑wfo: 观察一致性,带权重
- ∑wfe\sum wf_e∑wfe: 理论一致性,带权重
- 线性权重 linearweight=1−∣i−j∣k−1 linear weight = 1 - \frac{|i-j|}{k-1} linearweight=1−k−1∣i−j∣, kkk是样本总数, i,ji,ji,j是不同的类别
- 平方权重 quadraticweight=1−(i−jk−1)2 quadratic weight = 1 - (\frac{i-j}{k-1})^2 quadraticweight=1−(k−1i−j)2
PCC相关系数
- 皮尔逊相关系数ρX,Y=cov(X,Y)σXσY=E[(X−uX)(Y−uY)]σXσY \rho_{X,Y} = \frac{cov(X,Y)}{\sigma_X \sigma_Y} = \frac{E[(X-u_X)(Y-u_Y)]}{\sigma_X \sigma_Y} ρX,Y=σXσYcov(X,Y)=σXσYE[(X−uX)(Y−uY)]
参考资料
- http://blog.sina.com.cn/s/blog_8db50cf70101cffj.html
- https://en.wikipedia.org/wiki/Cohen%27s_kappa

















 5044
5044

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









