



在跨境电商行业中,选品一直是最具挑战性、也是最决定成败的环节之一。对于很多卖家来说,“选对一个产品”往往比“运营十个店铺”更重要。传统的选品模式依赖人工经验与碎片化数据,不仅效率低,而且极易受到主观判断的干扰。
随着AI技术的普及与电商数据的开放化,选品进入了智能化阶段。本文将详细介绍 GoBox 产品中的 AI选品模块 —— 它如何通过 秒级联网情报更新 与 多维爆品基因解码,帮助跨境卖家实现精准选品与库存风险最小化。
一、跨境电商的痛点:选品周期长、决策风险高
在传统跨境运营中,卖家常常面临以下几类问题:
-
🔍 信息割裂:不同平台数据结构不统一,人工统计困难;
-
⏱ 响应滞后:市场趋势变化快,而人工调研滞后,错失窗口期;
-
📦 备货压仓:选品决策失误导致库存积压、现金流受阻;
-
🧩 缺乏差异化:商品同质化严重,难以挖掘“具备爆品基因”的创新品类。
这些问题让选品变成了“高风险低确定性”的过程。GoBox AI 选品模块正是针对这些痛点提出了系统化的解决方案。
二、核心架构:AI选品的三大技术支撑
GoBox AI选品模块的底层逻辑由三个核心技术组成:
1. 秒级联网情报更新(Real-Time Intelligence Sync)
GoBox 通过对主流跨境平台 API 的数据接入与爬虫优化技术,实现了商品数据的实时获取。无论是 商品名称、链接、ID 还是平台销量、评价、价格趋势,系统都能在秒级完成同步。
这意味着,卖家可以实时看到目标商品在全球各站点的销售表现,实现 快速决策 + 动态调整。
✅ 示例:输入某个TikTok热卖品链接,系统会自动分析其7天内销售曲线、视频带货量、评论情绪变化以及买家地域分布,为后续选品提供可靠数据支撑。
2. 多维爆品基因解码(Multidimensional Product DNA Analysis)
在AI层面,GoBox构建了一个基于跨境行业特征的 爆品基因模型,通过机器学习和自然语言处理(NLP)对商品特征进行深度建模。模型分析的维度包括:
-
📈 平台销售表现(销量趋势、评价数量、转化率)
-
💬 消费者语义情感(正负情绪、关键词提取)
-
💡 商品特征参数(材质、用途、价格区间)
-
🌍 区域热度(不同国家市场偏好)
-
🧠 相似品聚类(AI聚类算法 + 相似度匹配)
最终输出的结果是商品的 爆品潜力评分(Product Potential Score),并附带差异化选品建议。
3. 差异化品与相似品推荐(Differentiation & Similarity Recommendation)
系统不仅能告诉你“当前热销什么”,还会提示“你应该卖什么”。
在输入商品主体信息后(如:TikTok上一款宠物梳子),AI模块会:
-
实时抓取该商品在目标平台的表现;
-
分析其竞争强度与利润空间;
-
推荐国内差异化品(例如功能升级或设计差异的产品);
-
输出相似品清单及供应链数据链接。
📊 示例:输入“宠物饮水机”,系统会给出:
当前TikTok热销品销量趋势;
国内厂家差异化产品(带滤芯、自动感应功能);
竞争饱和度与利润分析。
这样,卖家就能快速定位“差异化优势”,在激烈竞争中找到突破口。
三、GoBox AI选品的实际应用场景
| 场景 | 使用方式 | 解决问题 |
|---|---|---|
| 新手卖家开店前 |
输入目标商品/类目(如唇釉,哑光,不沾杯持色,防水美 妆化妆品,持续保湿,商品主体+修饰词效果最好;也 可输入宠物用品、家居,尽量为小类目,避免商品输 出范围太大) | 推荐潜力商品,降低试错成本 |
| 爆品二次拓展 | 输入已有爆品ID | 输出差异化可延伸商品 |
| 数据分析决策 | 监控竞品数据 | 提供动态调整建议 |
| 选品策略会议 | 多账号协同查看分析报告 | 提升团队决策效率 |
四、实战示例,多说无益,手操走起
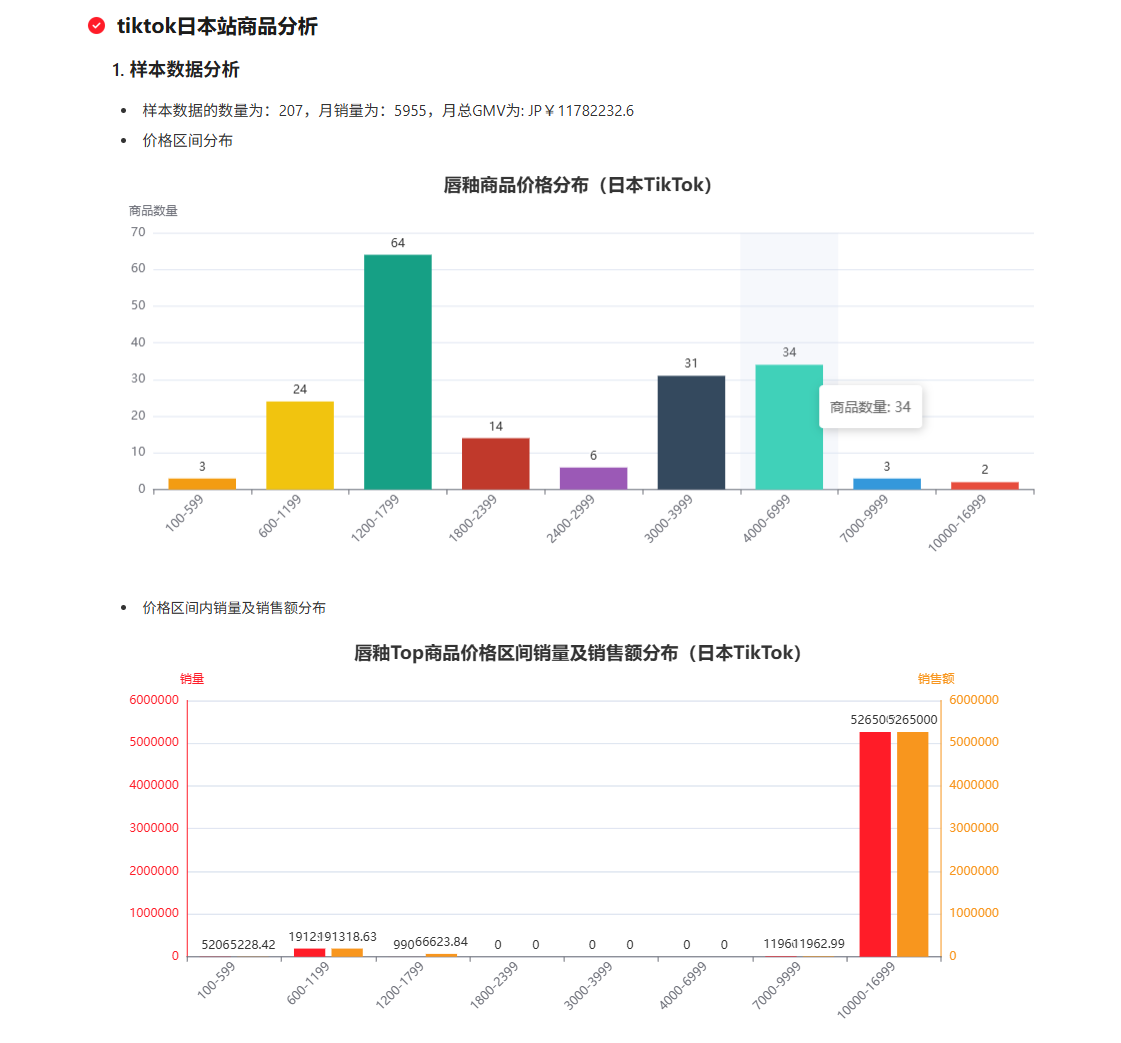
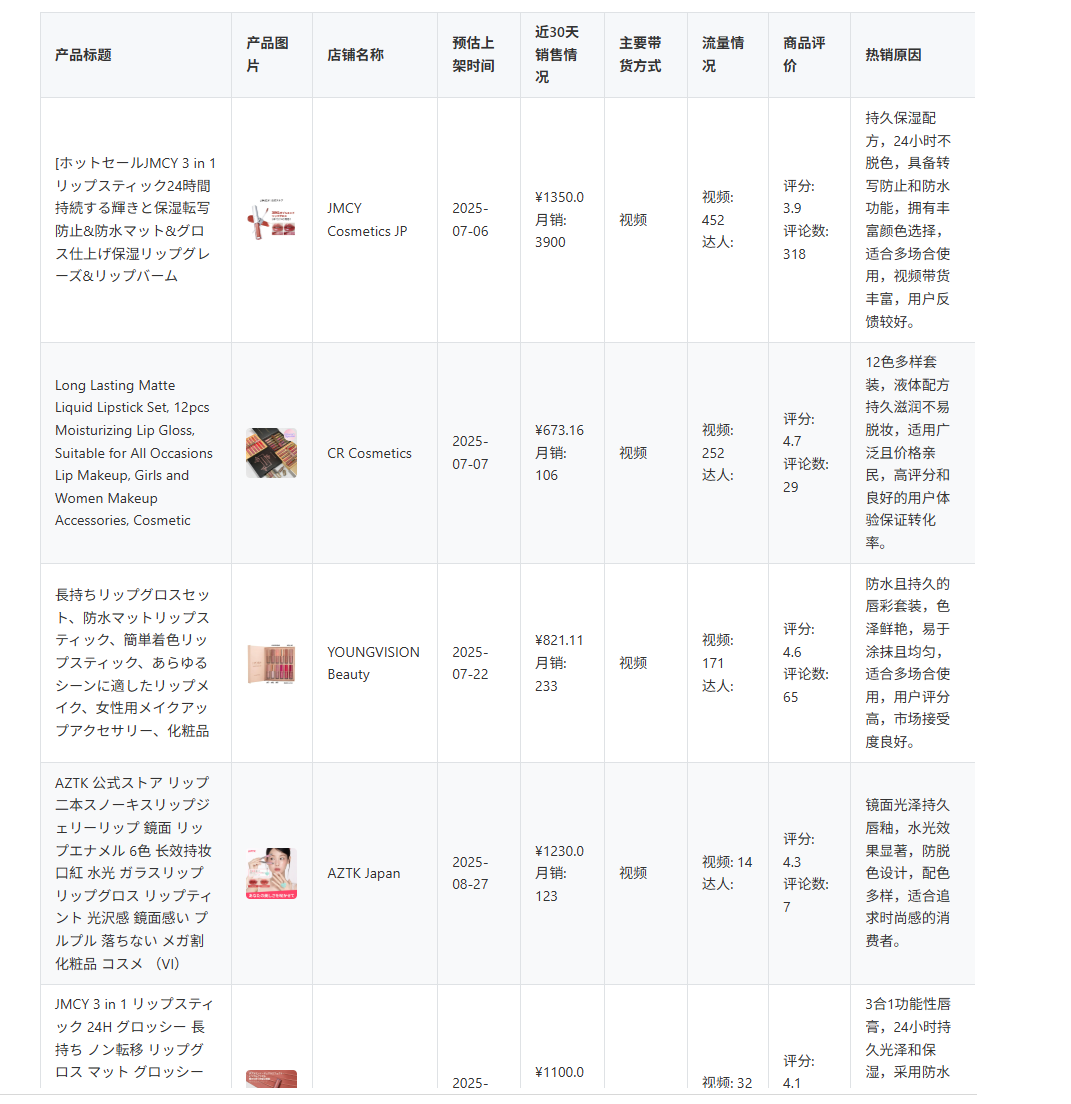
输入商品信息,对tk-日本站商品数据进行分析:
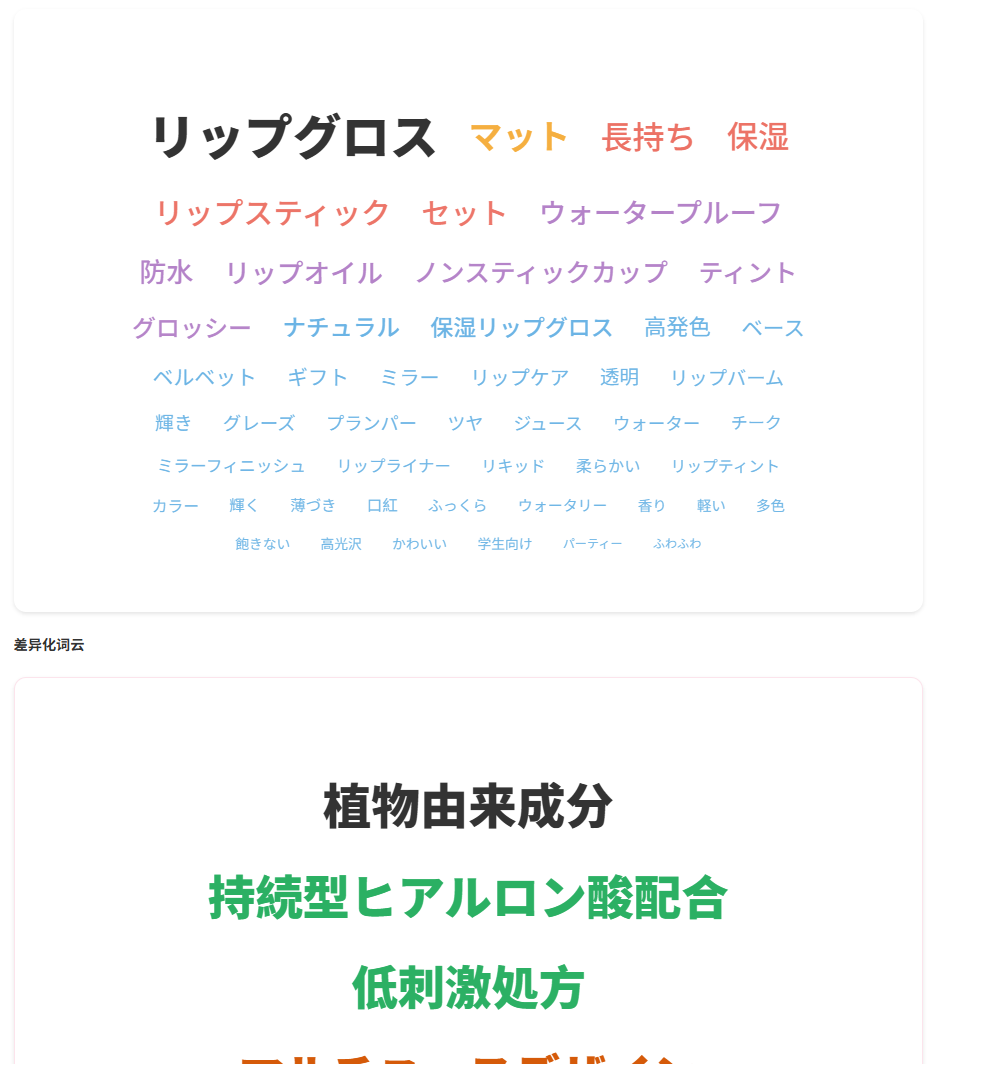
词云分析,分为共性词云与差异化词云,可放在商品名称中添加商品曝光率
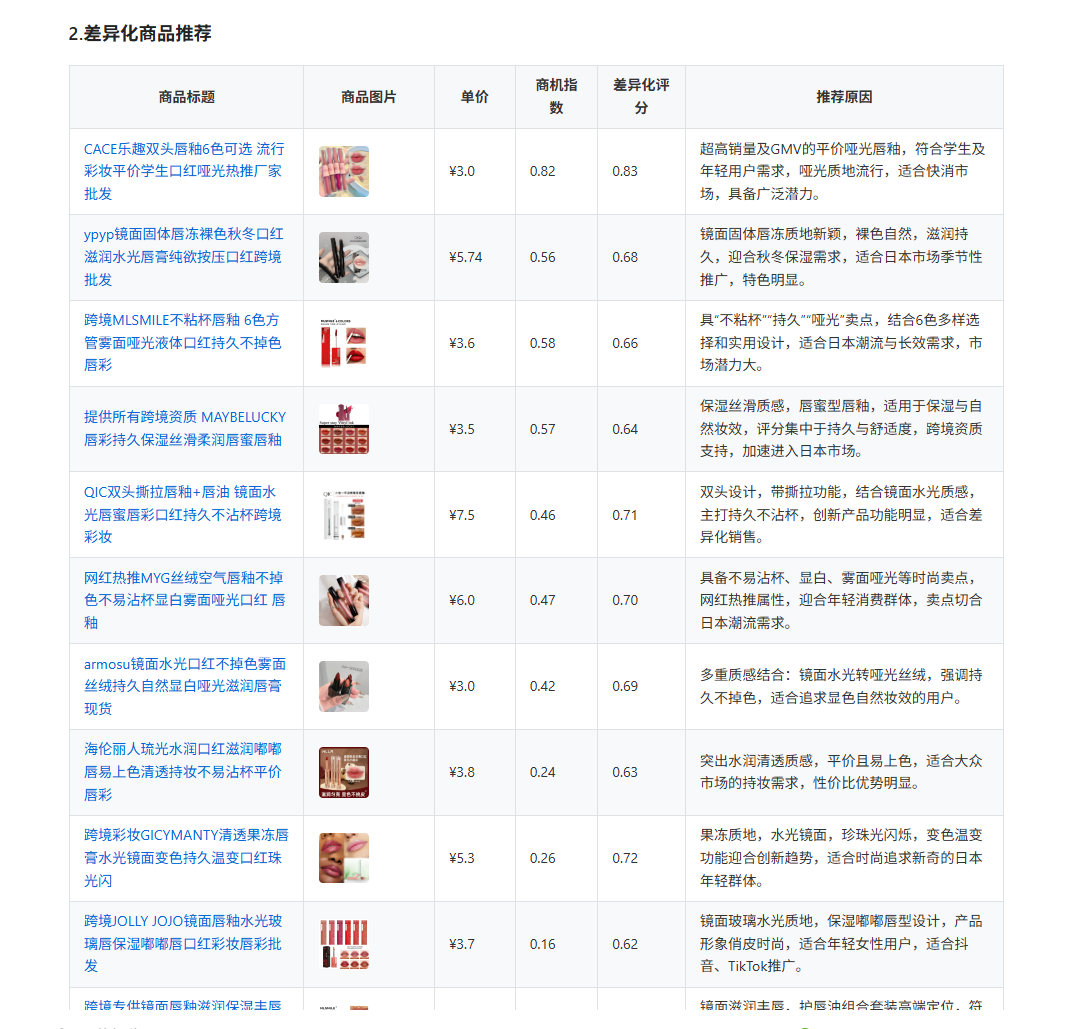
国内数据-差异化品和相似品分析

五、结语:让AI成为选品的“第二大脑”
选品的本质是信息决策,而AI正好擅长处理复杂的数据与模式识别。
GoBox AI选品模块让跨境卖家从“凭感觉选品”转向“基于数据决策”,实现从人工选品到智能化、体系化选品的跨越。
在跨境电商竞争日趋激烈的今天,谁能更快、更精准地抓住市场趋势,谁就能率先突围。
GoBox AI 正是帮助卖家提升决策效率、降低试错成本的“第二大脑”。

















 598
598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









