



一.快速排序的深入优化探讨
决定快排性能的关键点是每次单趟排序后,key对数组的分割,如果每次选key基本⼆分居中,那么快排的递归树就是颗均匀的满⼆叉树,性能最佳。但是实践中虽然不可能每次都是⼆分居中,但是性能也还是可控的。但是如果出现每次选到最⼩值/最⼤值,划分为0个和N-1的⼦问题时,时间复杂度为O(N^2),数组序列有序时就会出现这样的问题,我们前⾯已经⽤三数取中或者随机选key解决了这个问 题,也就是说我们解决了绝⼤多数的问题,但是现在还是有⼀些场景没解决(数组中有⼤量重复数据时),也会影响快排的性能问题,所以我们需要引入一种新的快排方式——
三路划分
。
1.三路划分
三路划分算法解析:
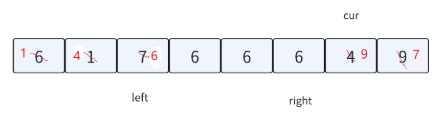
当⾯对有⼤量跟key相同的值时,三路划分的核⼼思想有点类似hoare的左右指针和lomuto的前后指针的结合。核⼼思想是把数组中的数据分为三段【⽐key⼩的值】 【跟key相等的值】【⽐key⼤的
值】,所以叫做三路划分算法。结合下图,理解⼀下实现思想:
1. key默认取left位置的值。
2. left指向区间最左边,right指向区间最后边,cur指向left+1位置。
3. cur遇到⽐key⼩的值后跟left位置交换,换到左边,left++,cur++。
4. cur遇到⽐key⼤的值后跟right位置交换,换到右边,right--。
5. cur遇到跟key相等的值后,cur++。
6. 直到cur > right结束。
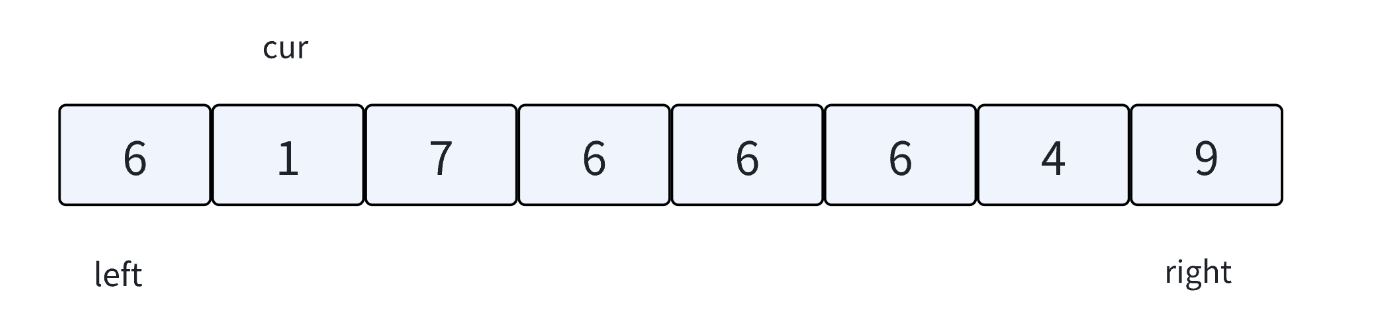
可以自己模拟一下整个过程。
代码实现:
void QuickSort(int* a, int left, int right)
{
if (left >= right)
return;
int begin = left;
int end = right;
// 随机选key
int randi = left + (rand() % (right - left));
Swap(&a[left], &a[randi]);
// 三路划分
// left和right指向就是跟key相等的区间
// [begin, left-1] [left, right] right+1, end]
int key = a[left];
int cur = left + 1;
while (cur <= right)
{
// 1、cur遇到⽐key⼩,⼩的换到左边,同时把key换到中间位置
// 2、cur遇到⽐key⼤,⼤的换到右边
if (a[cur] < key)
{
Swap(&a[cur], &a[left]);
++left;
++cur;
}
else if (a[cur] > key)
{
Swap(&a[cur], &a[right]);
--right;
}
else
{
++cur;
}
}
// [begin, left-1] [left, right] right+1, end]
QuickSort(a, begin, left - 1);
QuickSort(a, right + 1, end);
}这个OJ,当我们⽤快排的时候,传统的hoare和lomuto(双指针)的⽅法,都过不了这个题⽬。堆排序和归并和希尔是可以过的,其他⼏个O(N^2)也 不过了,因为这个题的测试⽤例中不仅仅有数据很多的⼤数组,也有⼀些特殊数据的数组,如⼤量重复数据的数组。堆排序和归并和希尔不是很受数据样本的分布和形态的影响,但是快排会,因为快排要选key,每次key都当趟分割都很偏,就会出现效率退化问题。
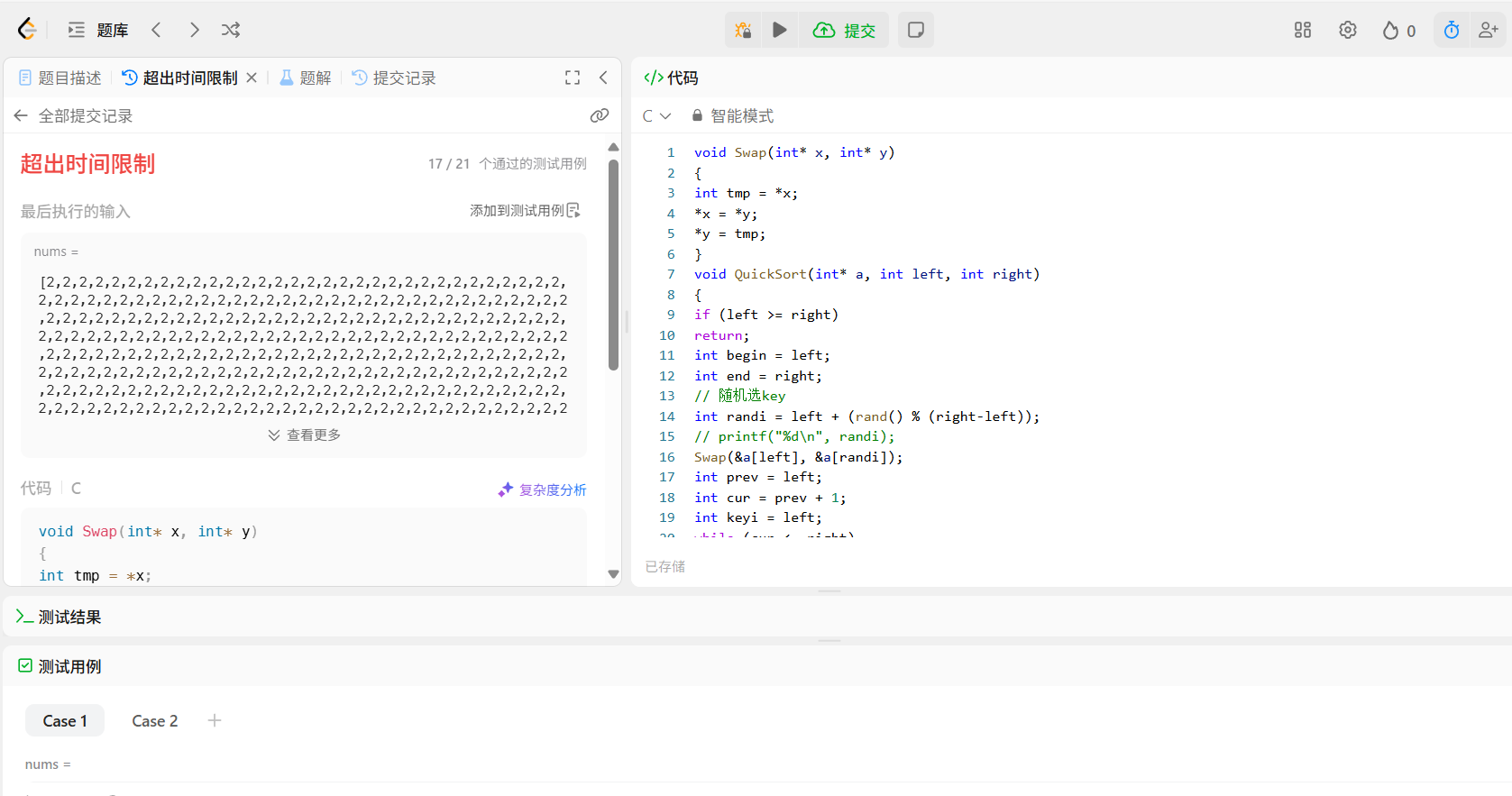
使用三路划分的方法。
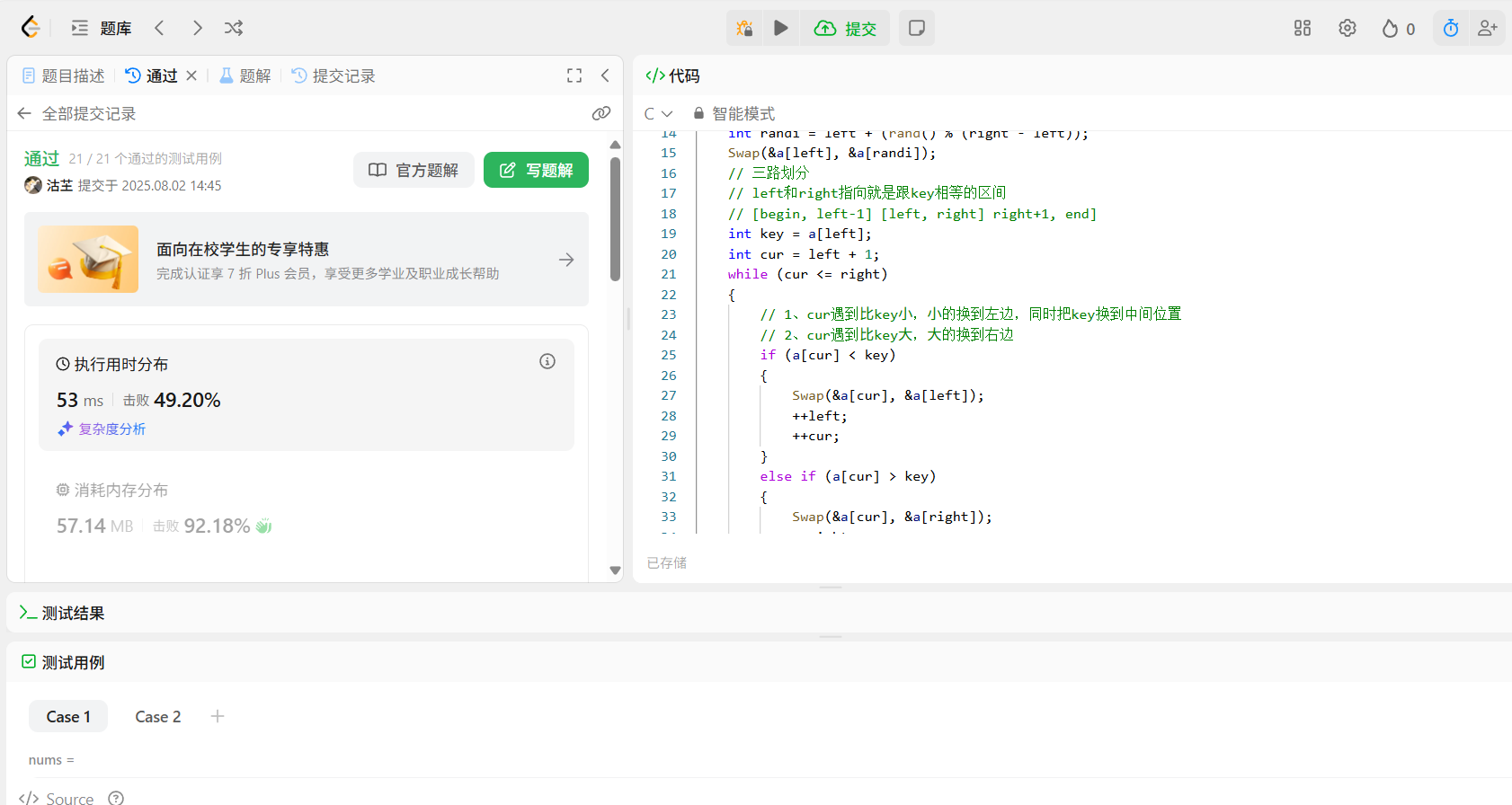
测试代码:
void Swap(int* p1, int* p2)
{
int tmp = *p1;
*p1 = *p2;
*p2 = tmp;
}
void QuickSort(int* a, int left, int right)
{
if (left >= right)
return;
int begin = left;
int end = right;
// 随机选key
int randi = left + (rand() % (right - left));
Swap(&a[left], &a[randi]);
// 三路划分
// left和right指向就是跟key相等的区间
// [begin, left-1] [left, right] right+1, end]
int key = a[left];
int cur = left + 1;
while (cur <= right)
{
// 1、cur遇到⽐key⼩,⼩的换到左边,同时把key换到中间位置
// 2、cur遇到⽐key⼤,⼤的换到右边
if (a[cur] < key)
{
Swap(&a[cur], &a[left]);
++left;
++cur;
}
else if (a[cur] > key)
{
Swap(&a[cur], &a[right]);
--right;
}
else
{
++cur;
}
}
// [begin, left-1] [left, right] right+1, end]
QuickSort(a, begin, left - 1);
QuickSort(a, right + 1, end);
}
int* sortArray(int* nums, int numsSize, int* returnSize) {
srand(time(0));
QuickSort(nums, 0, numsSize - 1);
*returnSize = numsSize;
return nums;
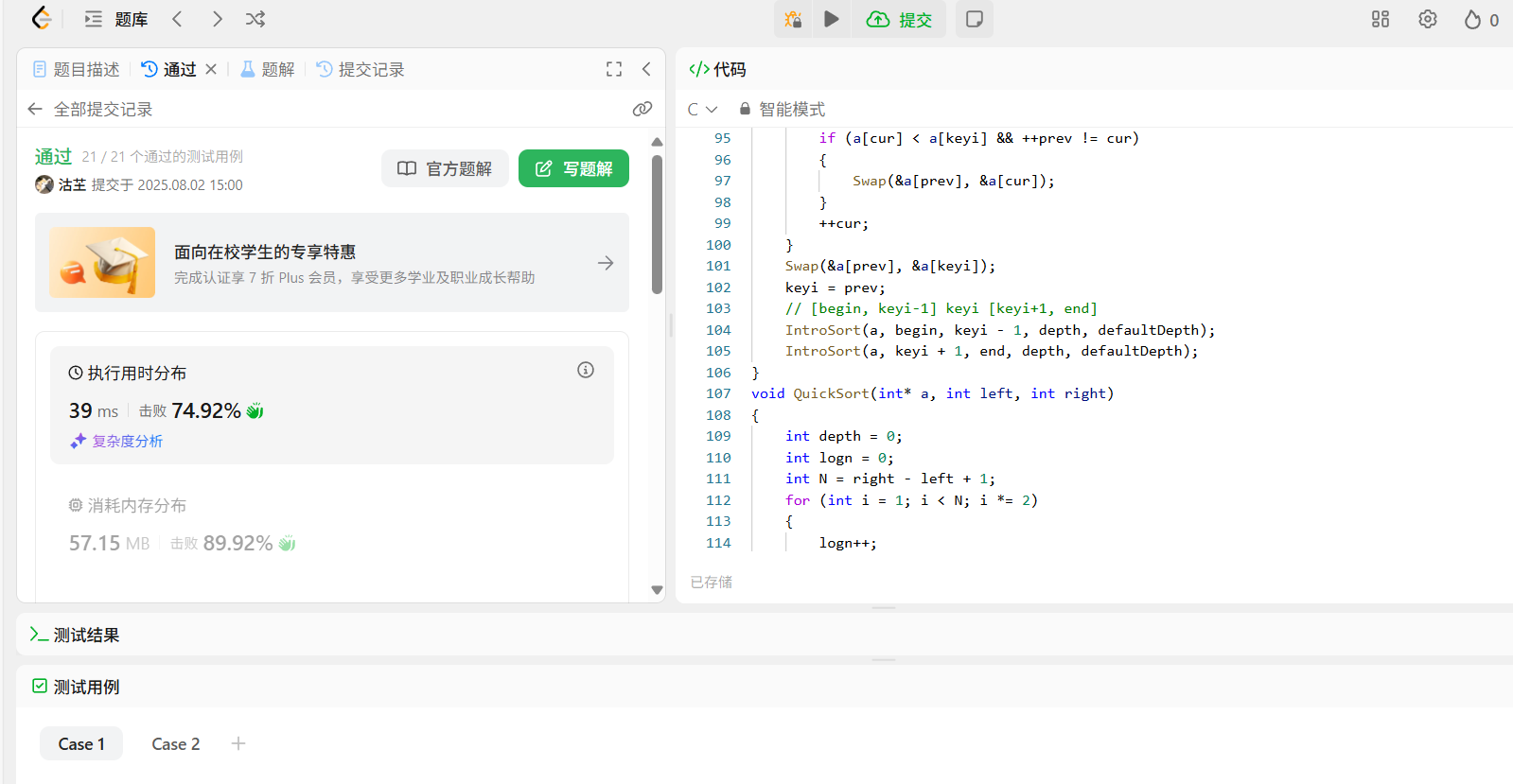
}2.introspective sort(自省排序)
introspective sort是另一种解决快排深度太深导致性能下降的方法,这个方法的
思路就是进行自
我侦测和反省,快排递归深度太深(sgi stl中使⽤的是深度为2倍排序元素数量的对数值)那就说明在
这种数据序列下,选key出现了问题,性能在快速退化,那么就不要再进⾏快排分割递归了,改换为堆排序进⾏排序。
代码实现:
void Swap(int* p1, int* p2)
{
int tmp = *p1;
*p1 = *p2;
*p2 = tmp;
}
void AdjustDown(int* a, int n, int parent)
{
int child = parent * 2 + 1;
while (child < n)
{
// 选出左右孩⼦中⼤的那⼀个
if (child + 1 < n && a[child + 1] > a[child])
{
++child;
}
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
void HeapSort(int* a, int n)
{
// 建堆 -- 向下调整建堆 -- O(N)
for (int i = (n - 1 - 1) / 2; i >= 0; --i)
{
AdjustDown(a, n, i);
}
// ⾃⼰先实现 -- O(N*logN)
int end = n - 1;
while (end > 0)
{
Swap(&a[end], &a[0]);
AdjustDown(a, end, 0);
--end;
}
}
void InsertSort(int* a, int n)
{
for (int i = 1; i < n; i++)
{
int end = i - 1;
int tmp = a[i];
// 将tmp插⼊到[0,end]区间中,保持有序
while (end >= 0)
{
if (tmp < a[end])
{
a[end + 1] = a[end];
--end;
}
else
{
break;
}
}
a[end + 1] = tmp;
}
}
void IntroSort(int* a, int left, int right, int depth, int defaultDepth)
{
if (left >= right)
return;
// 数组⻓度⼩于16的⼩数组,换为插⼊排序,简单递归次数
if (right - left + 1 < 16)
{
InsertSort(a + left, right - left + 1);
return;
}
// 当深度超过2*logN时改⽤堆排序
if (depth > defaultDepth)
{
HeapSort(a + left, right - left + 1);
return;
}
depth++;
int begin = left;
int end = right;
// 随机选key
int randi = left + (rand() % (right - left));
Swap(&a[left], &a[randi]);
int prev = left;
int cur = prev + 1;
int keyi = left;
while (cur <= right)
{
if (a[cur] < a[keyi] && ++prev != cur)
{
Swap(&a[prev], &a[cur]);
}
++cur;
}
Swap(&a[prev], &a[keyi]);
keyi = prev;
// [begin, keyi-1] keyi [keyi+1, end]
IntroSort(a, begin, keyi - 1, depth, defaultDepth);
IntroSort(a, keyi + 1, end, depth, defaultDepth);
}
void QuickSort(int* a, int left, int right)
{
int depth = 0;
int logn = 0;
int N = right - left + 1;
for (int i = 1; i < N; i *= 2)
{
logn++;
}
// introspective sort -- ⾃省排序
IntroSort(a, left, right, depth, logn * 2);
}
这里主要引入了depth计算递归深度,当
depth > logn * 2 时候,会改用堆排,也引入了小区间优化,数组⻓度⼩于16的⼩数组,换为插⼊排序,简单递归次数。关于为什么是depth > logn * 2,而不是logn或者logn * 3,只能说明ogn * 2是一个比较
适中的值,logn、logn * 3也没有问题。
测试代码:可以自行测试不同倍数logn的情况。
void Swap(int* p1, int* p2)
{
int tmp = *p1;
*p1 = *p2;
*p2 = tmp;
}
void AdjustDown(int* a, int n, int parent)
{
int child = parent * 2 + 1;
while (child < n)
{
// 选出左右孩⼦中⼤的那⼀个
if (child + 1 < n && a[child + 1] > a[child])
{
++child;
}
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
void HeapSort(int* a, int n)
{
// 建堆 -- 向下调整建堆 -- O(N)
for (int i = (n - 1 - 1) / 2; i >= 0; --i)
{
AdjustDown(a, n, i);
}
// ⾃⼰先实现 -- O(N*logN)
int end = n - 1;
while (end > 0)
{
Swap(&a[end], &a[0]);
AdjustDown(a, end, 0);
--end;
}
}
void InsertSort(int* a, int n)
{
for (int i = 1; i < n; i++)
{
int end = i - 1;
int tmp = a[i];
// 将tmp插⼊到[0,end]区间中,保持有序
while (end >= 0)
{
if (tmp < a[end])
{
a[end + 1] = a[end];
--end;
}
else
{
break;
}
}
a[end + 1] = tmp;
}
}
void IntroSort(int* a, int left, int right, int depth, int defaultDepth)
{
if (left >= right)
return;
// 数组⻓度⼩于16的⼩数组,换为插⼊排序,简单递归次数
if (right - left + 1 < 16)
{
InsertSort(a + left, right - left + 1);
return;
}
// 当深度超过2*logN时改⽤堆排序
if (depth > defaultDepth)
{
HeapSort(a + left, right - left + 1);
return;
}
depth++;
int begin = left;
int end = right;
// 随机选key
int randi = left + (rand() % (right - left));
Swap(&a[left], &a[randi]);
int prev = left;
int cur = prev + 1;
int keyi = left;
while (cur <= right)
{
if (a[cur] < a[keyi] && ++prev != cur)
{
Swap(&a[prev], &a[cur]);
}
++cur;
}
Swap(&a[prev], &a[keyi]);
keyi = prev;
// [begin, keyi-1] keyi [keyi+1, end]
IntroSort(a, begin, keyi - 1, depth, defaultDepth);
IntroSort(a, keyi + 1, end, depth, defaultDepth);
}
void QuickSort(int* a, int left, int right)
{
int depth = 0;
int logn = 0;
int N = right - left + 1;
for (int i = 1; i < N; i *= 2)
{
logn++;
}
// introspective sort -- ⾃省排序
IntroSort(a, left, right, depth, logn * 2);
}
int* sortArray(int* nums, int numsSize, int* returnSize) {
srand(time(0));
QuickSort(nums, 0, numsSize - 1);
* returnSize = numsSize;
return nums;
}二.外排序之文件归并排序实现
外排序(External sorting)是指能够处理极⼤量数据的排序算法。通常来说,外排序处理的数据不能⼀次装⼊内存,只能放在读写较慢的外存储器(通常是硬盘)上。外排序通常采⽤的是⼀种“排序-归并”的策略。在排序阶段,先读⼊能放在内存中的数据量,将其排序输出到⼀个临时⽂件,依此进⾏,将待排序数据组织为多个有序的临时⽂件。然后在归并阶段将这些临时⽂件组合为⼀个⼤的有序⽂件,也即排序结果。
跟外排序对应的就是内排序,我们之前讲的常⻅的排序,都是内排序,他们排序思想适应的是数据在内存中,⽀持随机访问。归并排序的思想不需要随机访问数据,只需要依次按序列读取数据,所归并排序既是⼀个内排序,也是⼀个外排序。
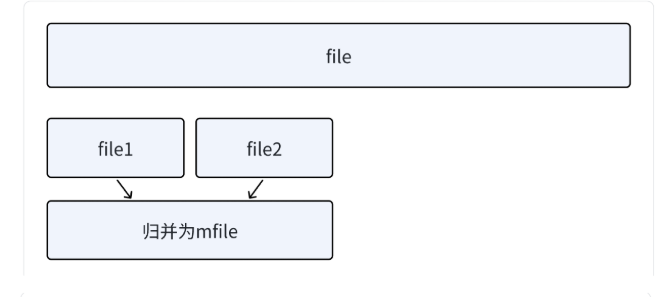
1.⽂件归并排序思路分析
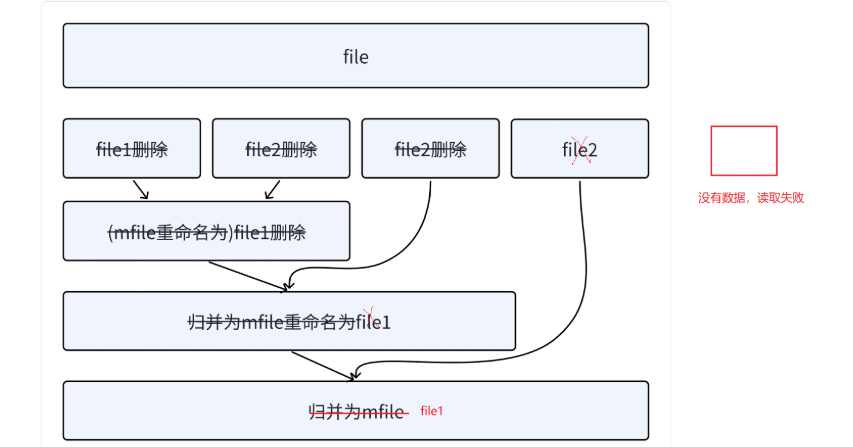
1. 读取n个值排序后写到file1,再读取n个值排序后写到file2。
2. file1和file2利⽤归并排序的思想,依次读取⽐较,取⼩的尾插到mfile,mfile归并为⼀个有序⽂件。
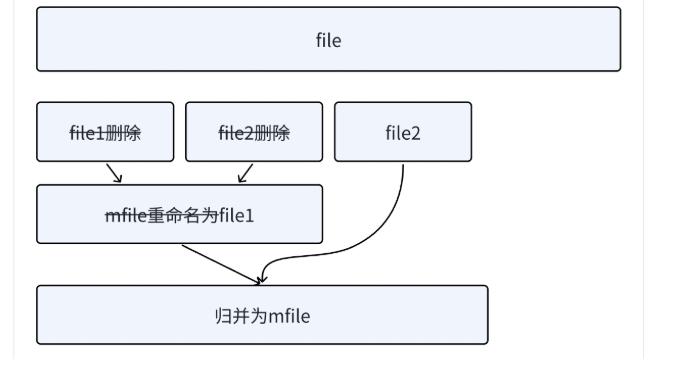
3. 将file1和file2删掉,mfile重命名为file1。
4. 再次读取n个数据排序后写到file2。
5. 继续⾛file1和file2归并,重复步骤2,直到⽂件中⽆法读出数据。最后归并出的有序数据放到了
file1中。
代码实现:
#define _CRT_SECURE_NO_WARNINGS 1
#include<stdio.h>
#include<time.h>
#include<stdlib.h>
// 创建N个随机数,写到文件中
void CreateNDate()
{
// 造数据
int n = 10000000;
srand(time(0));
const char* file = "data.txt";
FILE* fin = fopen(file, "w");
if (fin == NULL)
{
perror("fopen error");
return;
}
for (int i = 0; i < n; ++i)
{
int x = rand() + i;
fprintf(fin, "%d\n", x);
}
fclose(fin);
}
int compare(const void* a, const void* b)
{
return (*(int*)a - *(int*)b);
}
// 返回实际读到的数据个数,没有数据了,返回0
int ReadNDataSortToFile(FILE* fout, int n, const char* file1)
{
int x = 0;
int* a = (int*)malloc(sizeof(int) * n);
if (a == NULL)
{
perror("malloc error");
return 0;
}
// 想读取n个数据,如果遇到文件结束,应该读到j个
int j = 0;
for (int i = 0; i < n; i++)
{
if (fscanf(fout, "%d", &x) == EOF)
break;
a[j++] = x;
}
if (j == 0)
{
free(a);
return 0;
}
// 排序
qsort(a, j, sizeof(int), compare);
FILE* fin = fopen(file1, "w");
if (fin == NULL)
{
free(a);
perror("fopen error");
return 0;
}
// 写回file1文件
for (int i = 0; i < j; i++)
{
fprintf(fin, "%d\n", a[i]);
}
free(a);
fclose(fin);
return j;
}
void MergeFile(const char* file1, const char* file2, const char* mfile)
{
FILE* fout1 = fopen(file1, "r");
if (fout1 == NULL)
{
perror("fopen error");
return;
}
FILE* fout2 = fopen(file2, "r");
if (fout2 == NULL)
{
perror("fopen error");
return;
}
FILE* mfin = fopen(mfile, "w");
if (mfin == NULL)
{
perror("fopen error");
return;
}
// 归并逻辑
int x1 = 0;
int x2 = 0;
int ret1 = fscanf(fout1, "%d", &x1);
int ret2 = fscanf(fout2, "%d", &x2);
while (ret1 != EOF && ret2 != EOF)
{
if (x1 < x2)
{
fprintf(mfin, "%d\n", x1);
ret1 = fscanf(fout1, "%d", &x1);
}
else
{
fprintf(mfin, "%d\n", x2);
ret2 = fscanf(fout2, "%d", &x2);
}
}
while (ret1 != EOF)
{
fprintf(mfin, "%d\n", x1);
ret1 = fscanf(fout1, "%d", &x1);
}
while (ret2 != EOF)
{
fprintf(mfin, "%d\n", x2);
ret2 = fscanf(fout2, "%d", &x2);
}
fclose(fout1);
fclose(fout2);
fclose(mfin);
}
int main()
{
CreateNDate();
const char* file1 = "file1.txt";
const char* file2 = "file2.txt";
const char* mfile = "mfile.txt";
FILE* fout = fopen("data.txt", "r");
if (fout == NULL)
{
perror("fopen error");
return;
}
int m = 1000000;
ReadNDataSortToFile(fout, m, file1);
ReadNDataSortToFile(fout, m, file2);
while (1)
{
MergeFile(file1, file2, mfile);
// 删除file1和file2
remove(file1);
remove(file2);
// 重命名mfile为file1
rename(mfile, file1);
// 当再去读取数据,一个都读不到,说明已经没有数据了
// 已经归并完成,归并结果在file1
int n = 0;
if ((n = ReadNDataSortToFile(fout, m, file2)) == 0)
break;
}
return 0;
}注意:需要先CreateNDate,产生文件后再归并。

















 5万+
5万+




 到【灌水乐园】发言
到【灌水乐园】发言







