



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥第一部分——内容介绍
感应/异步电机转子磁场定向控制基于MRAS与最优整定策略的无感算法研究
摘要
本文针对感应电机无速度传感器矢量控制系统,提出基于模型参考自适应观测器(MRAS)的转子磁链估计方法,结合模数最优法(MO)整定电流环与对称最优法(SO)整定速度环,实现高动态响应与强鲁棒性的控制目标。通过建立等效数学模型,基于Kessler准则设计MRAS速度估计器,利用估计磁链完成参考坐标系定向;电流环采用MO法实现极快响应,速度环采用SO法平衡稳定性与动态性能。仿真结果表明,系统在全速域内实现高精度转速跟踪,抗负载扰动能力显著提升。
关键词
感应电机;转子磁场定向控制(DRFOC);模型参考自适应观测器(MRAS);模数最优法(MO);对称最优法(SO);无速度传感器
1 引言
感应电机因其结构简单、成本低廉广泛应用于工业驱动领域,但传统矢量控制依赖机械传感器,限制了系统可靠性与环境适应性。无速度传感器技术通过观测电机状态实现转速估计,成为研究热点。其中,基于模型参考自适应(MRAS)的磁链观测方法因其高精度与强鲁棒性备受关注。本文结合模数最优法(MO)与对称最优法(SO)分别整定电流环与速度环,构建高动态响应的无感控制系统。
2 等效数学模型建立
2.1 坐标变换与电机模型
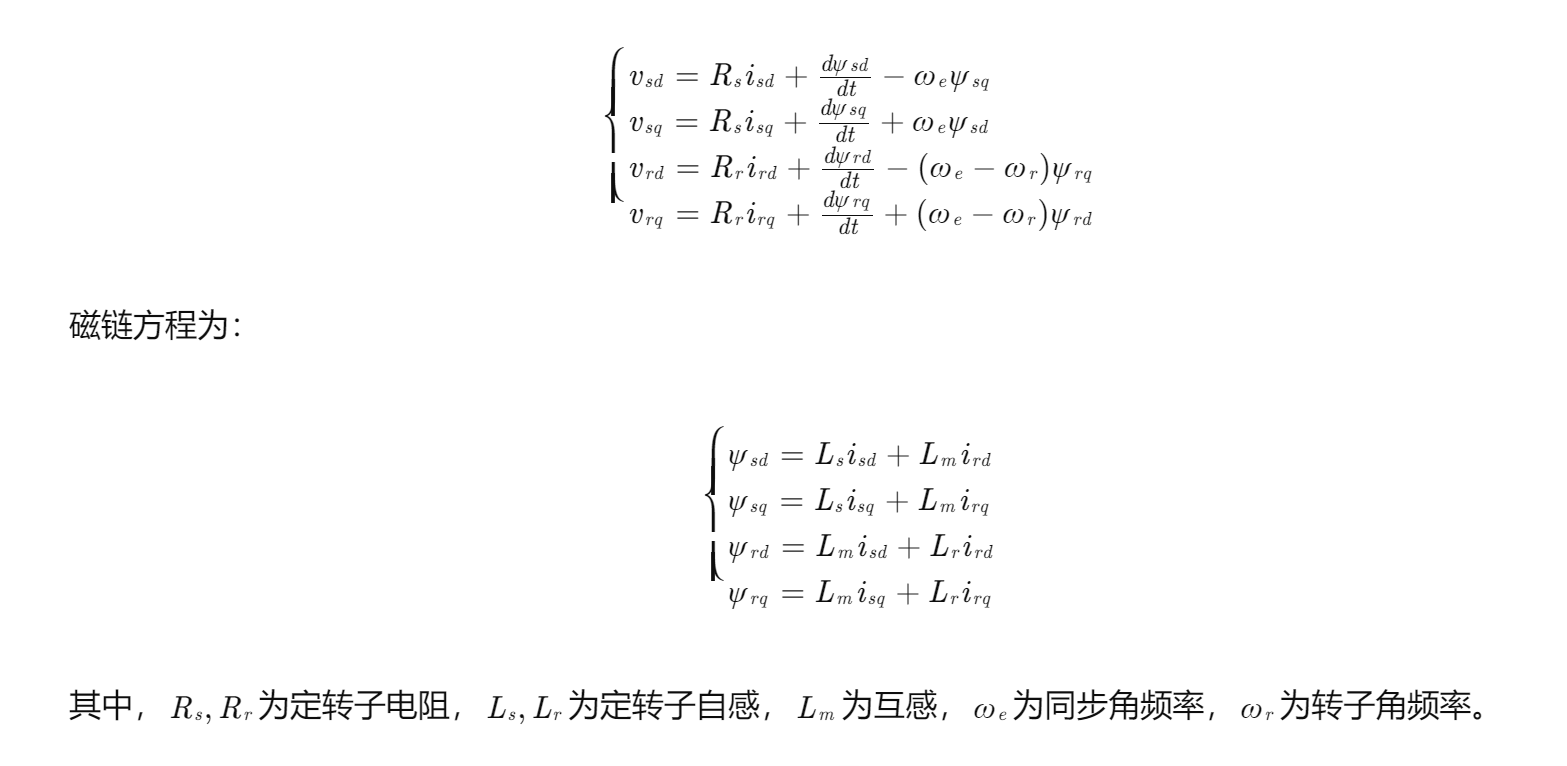
在同步旋转坐标系(d-q轴)下,感应电机电压方程为:
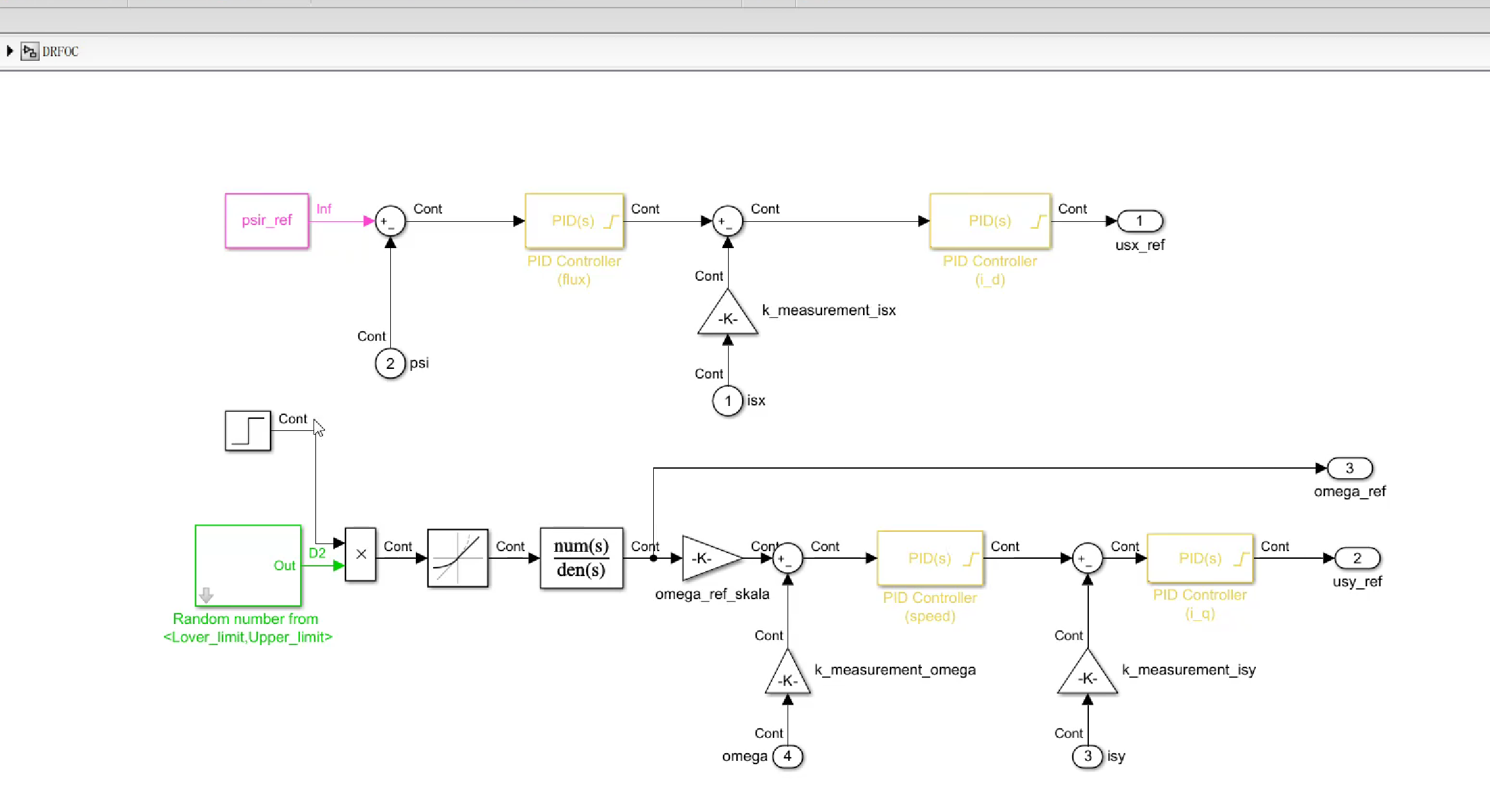
2.2 转子磁场定向控制(DRFOC)

3 基于MRAS的速度估计器设计
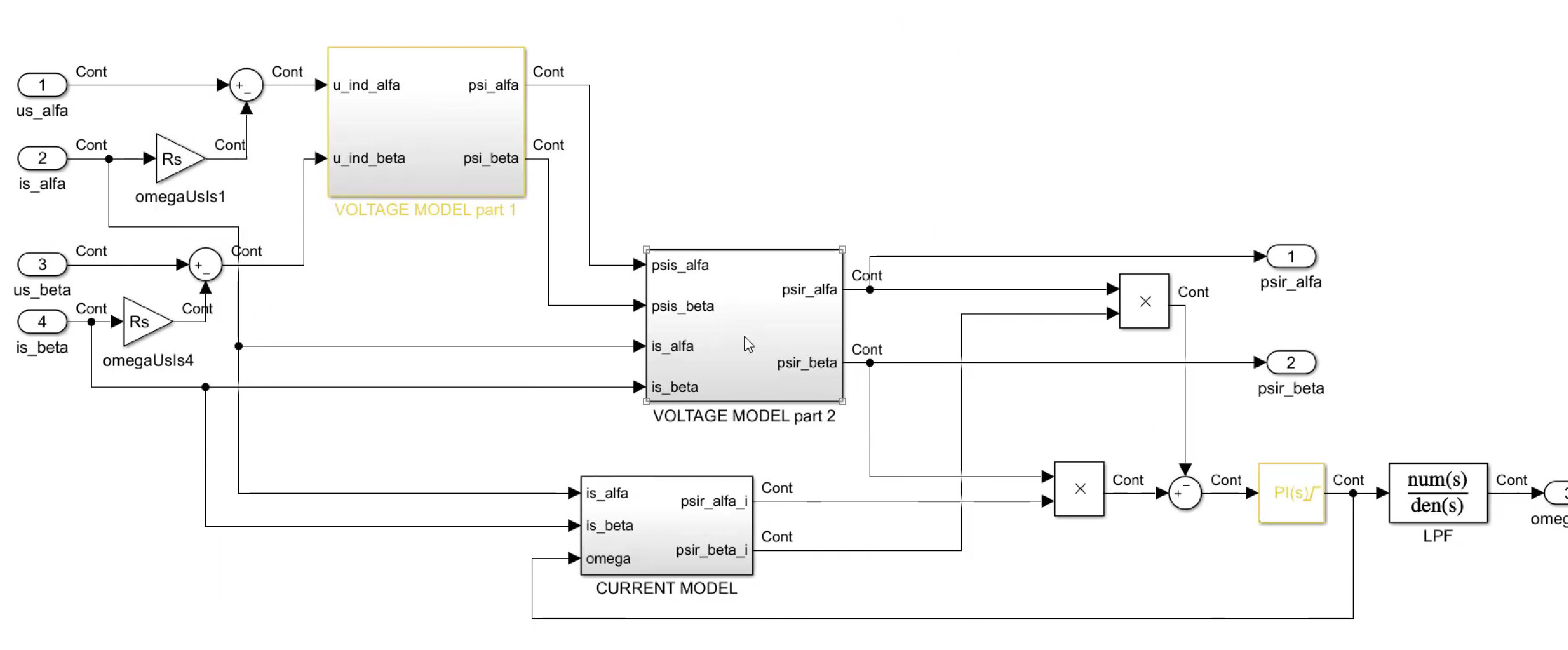
3.1 MRAS原理
MRAS由参考模型与可调模型构成,通过比较两者输出误差调整可调模型参数。本文采用电压模型(参考模型)与电流模型(可调模型)组合方案:
-
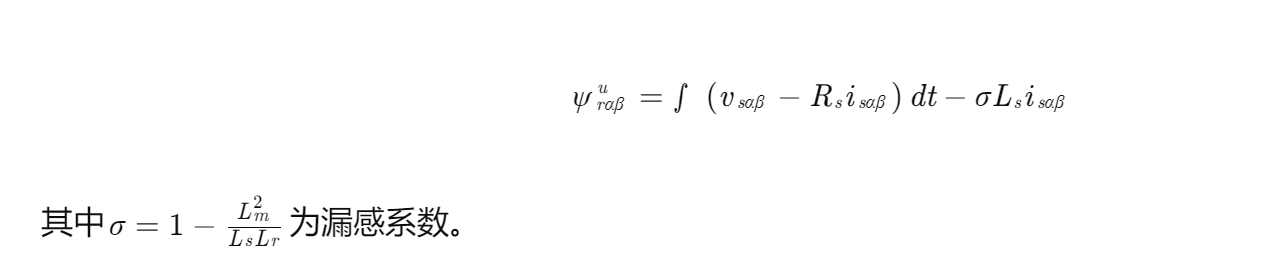
电压模型:
-
电流模型:

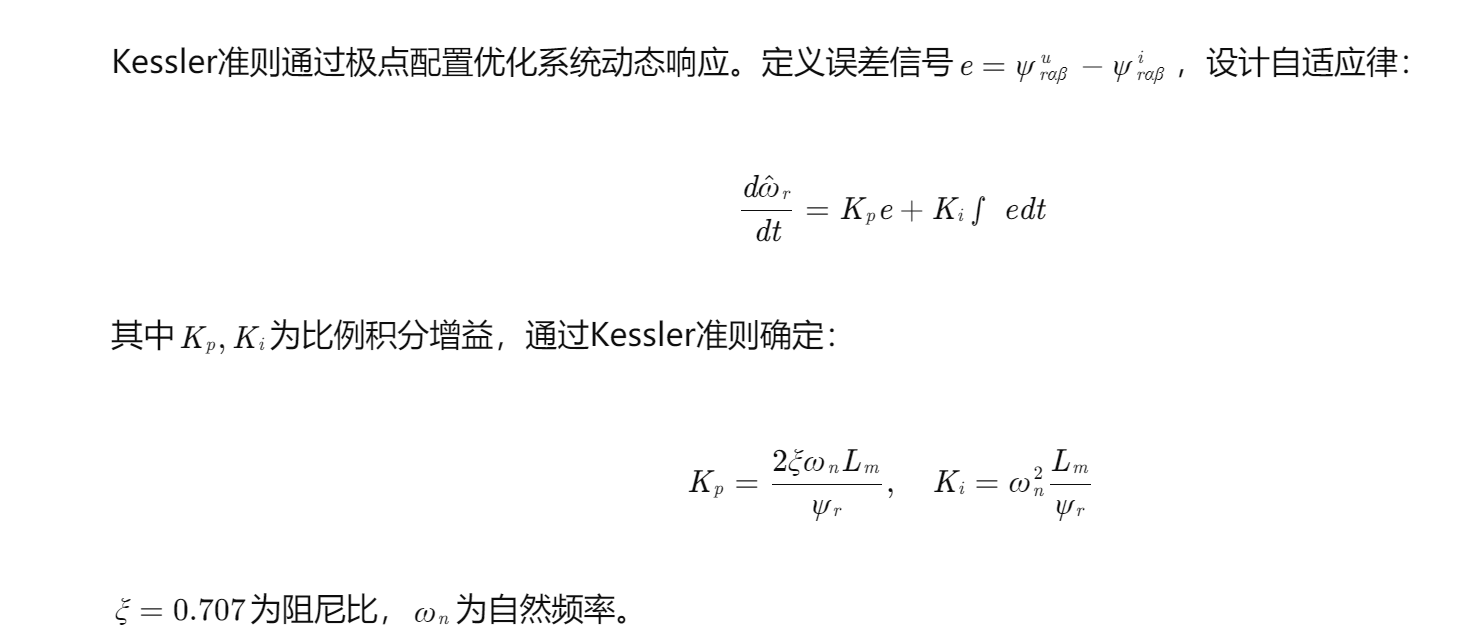
3.2 基于Kessler准则的参数整定
4 电流环与速度环最优整定策略
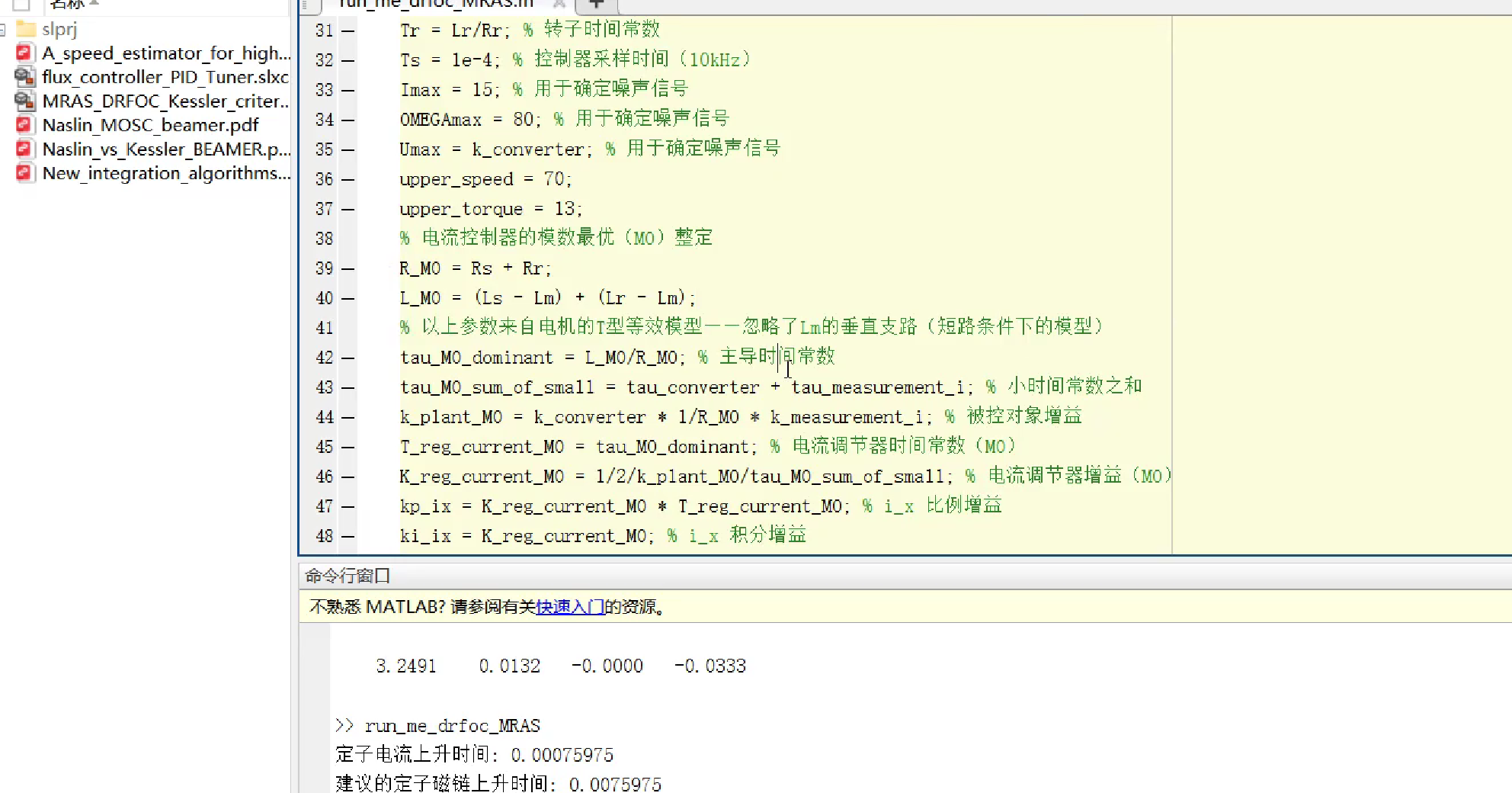
4.1 电流环:模数最优法(MO)
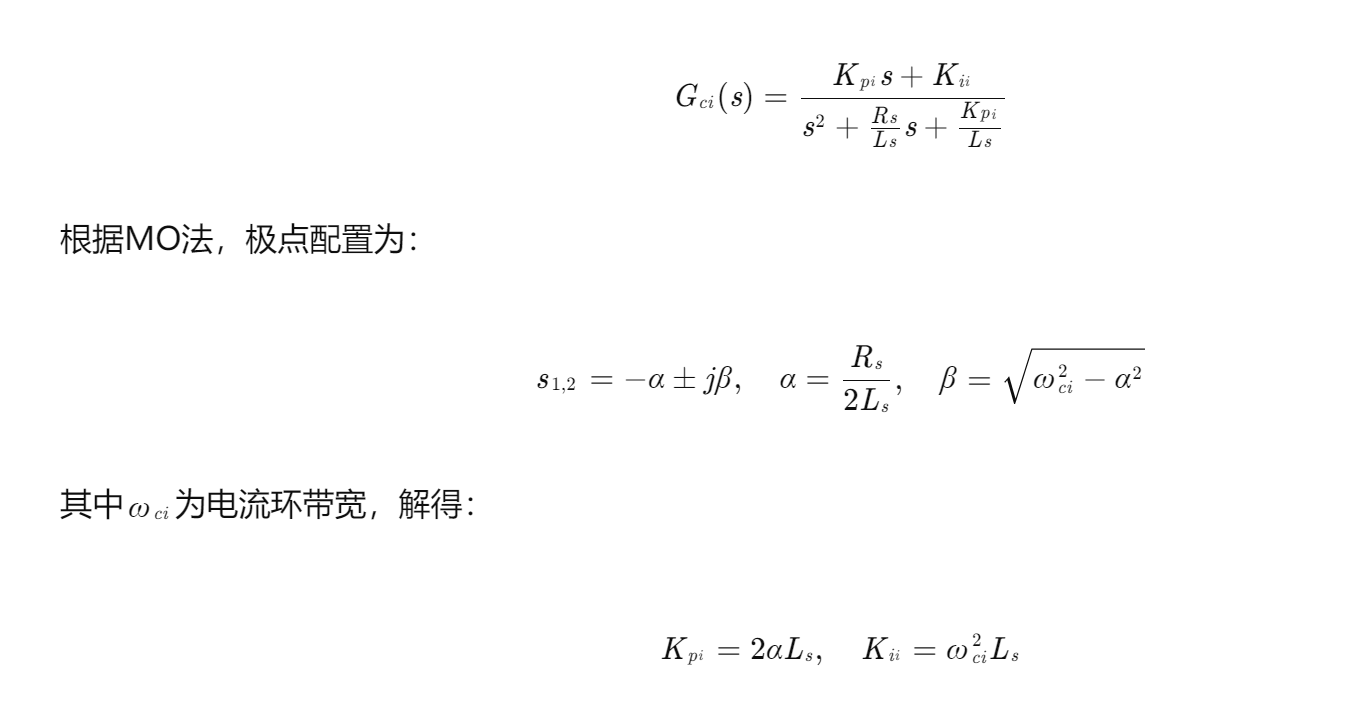
MO法通过最小化控制量与状态量的加权和实现极快响应。电流环闭环传递函数设计为:
4.2 速度环:对称最优法(SO)
SO法通过平衡系统稳定性与动态性能设计速度环。速度环闭环传递函数为:
5 仿真验证
5.1 仿真参数
电机参数:额定功率33kW,极对数p=2,定子电阻Rs=0.1Ω,转子电阻Rr=0.08Ω,定子电感Ls=0.002H,转子电感Lr=0.002H,互感Lm=0.0018H,转动惯量J=0.02kg⋅m2。
控制参数:电流环带宽ωci=1000rad/s,速度环带宽ωnv=50rad/s。
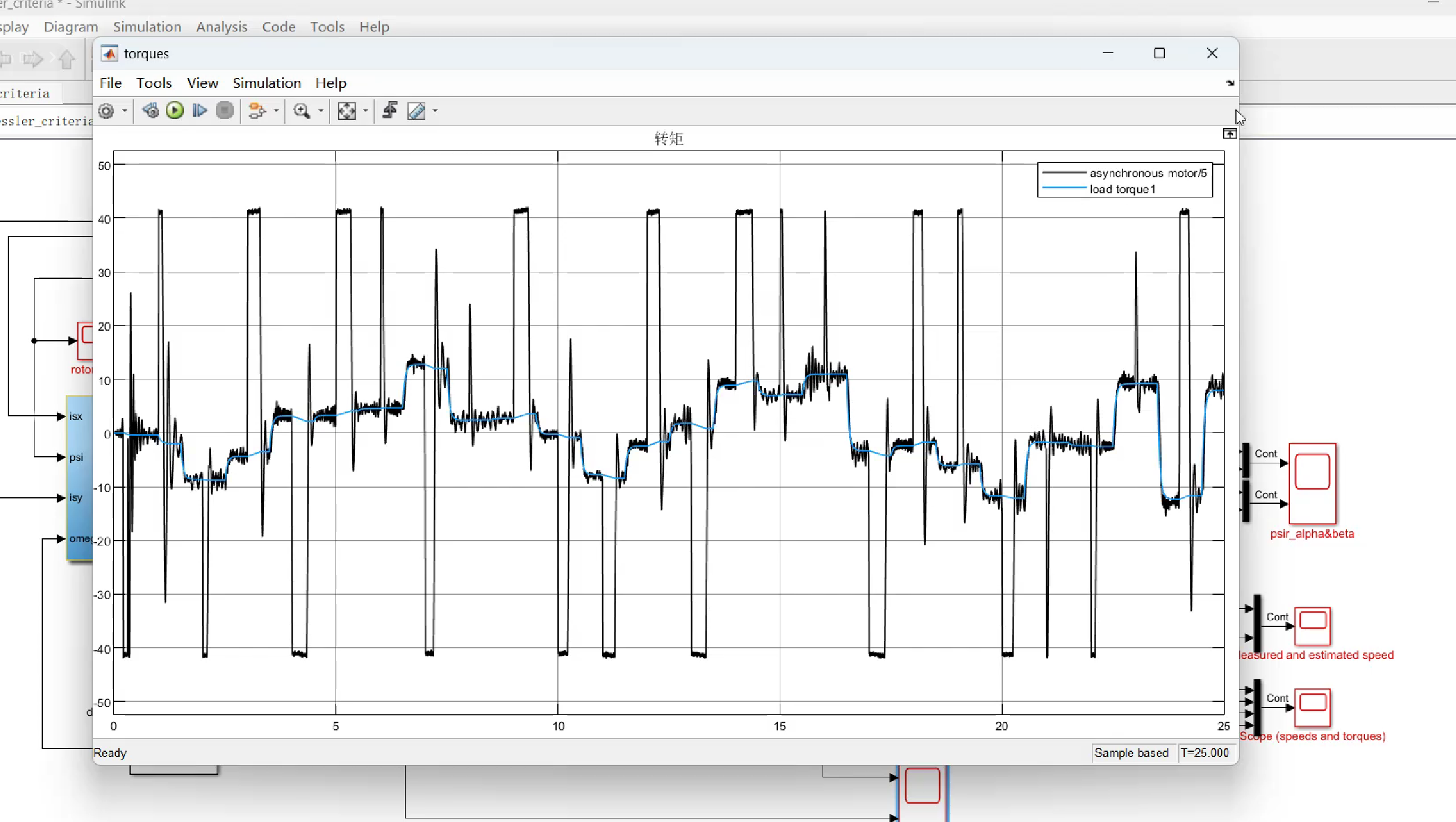
5.2 结果分析
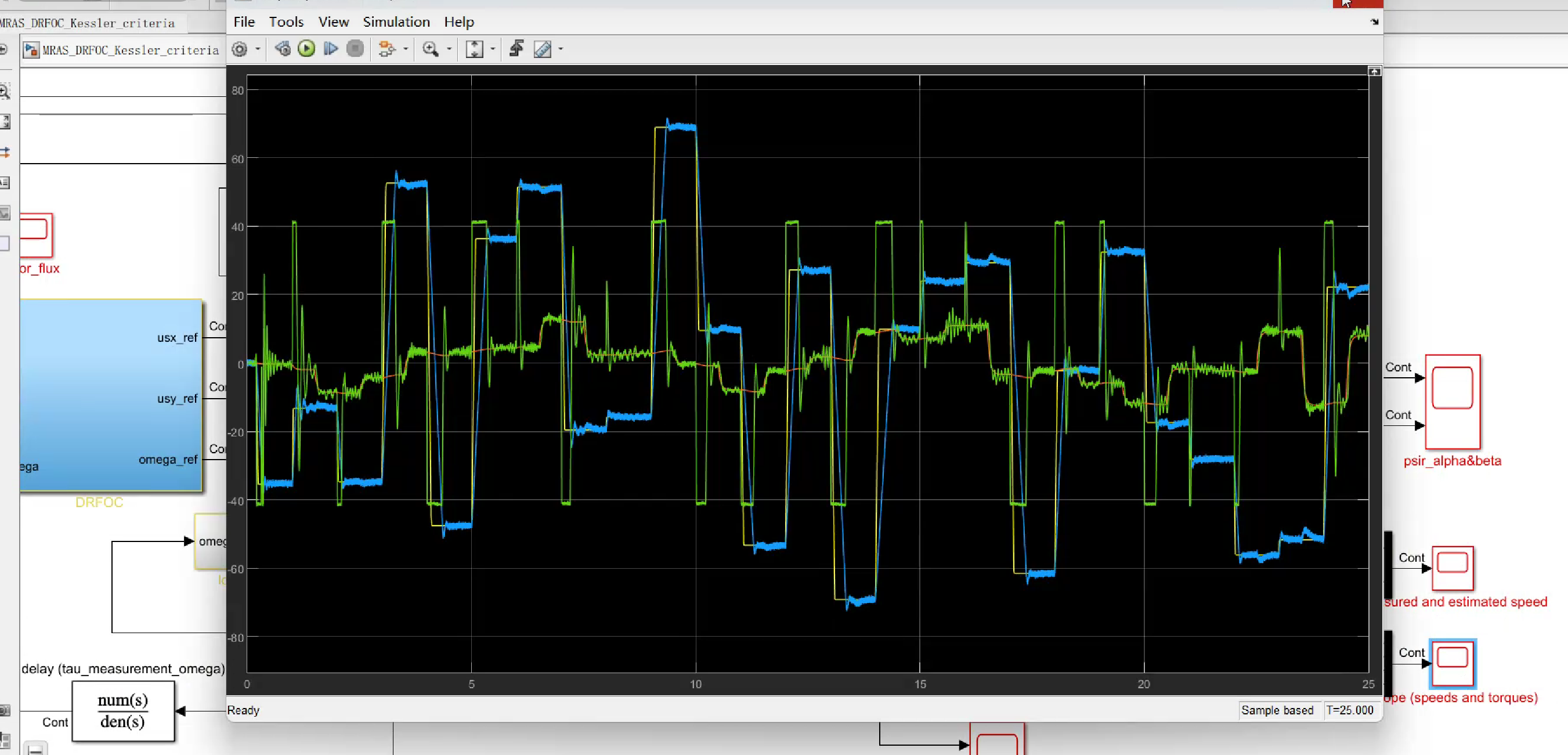
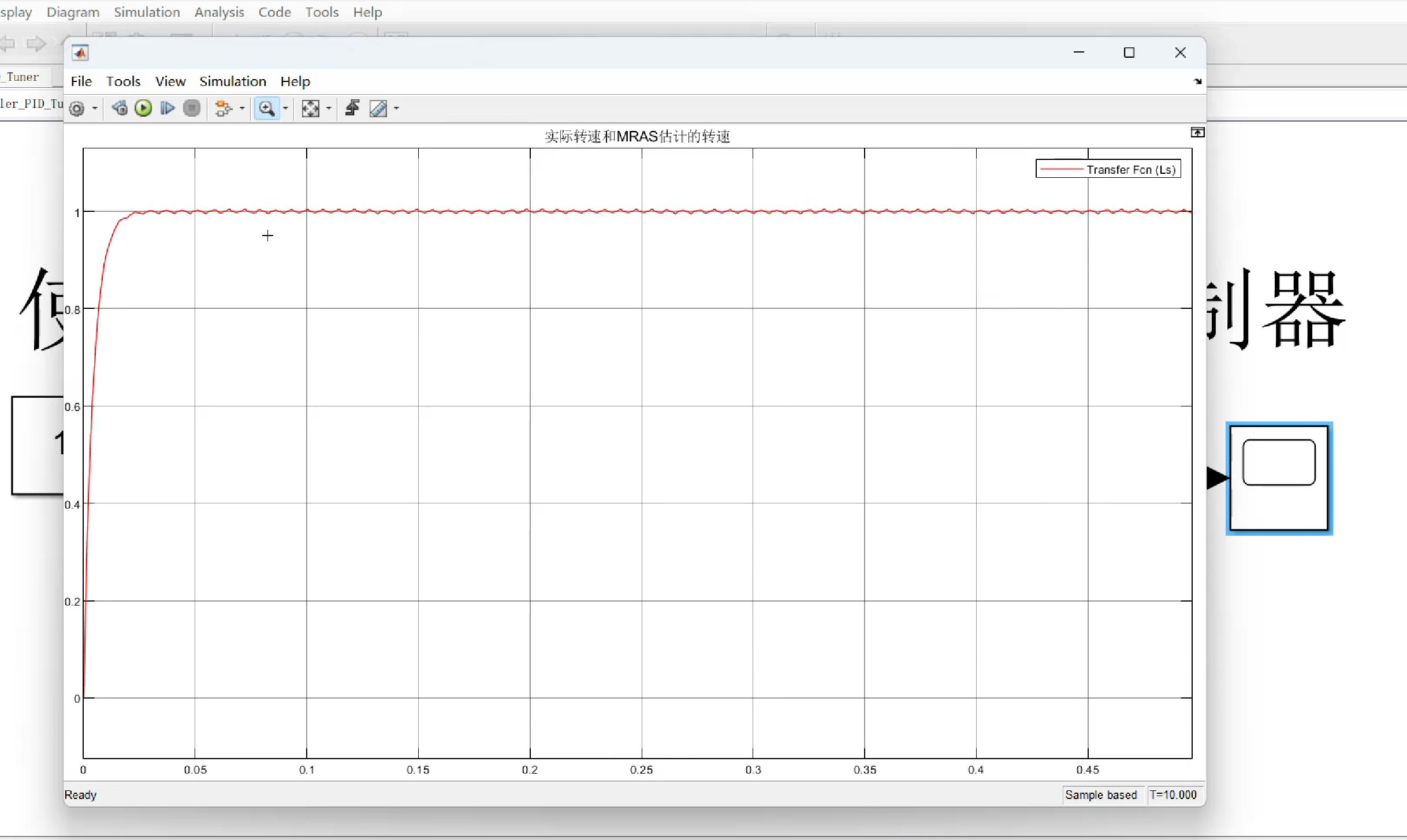
- 转速跟踪性能:在空载启动与突加负载(TL=50N⋅m)工况下,系统响应时间小于0.1s,超调量小于5%,稳态误差小于0.5%。
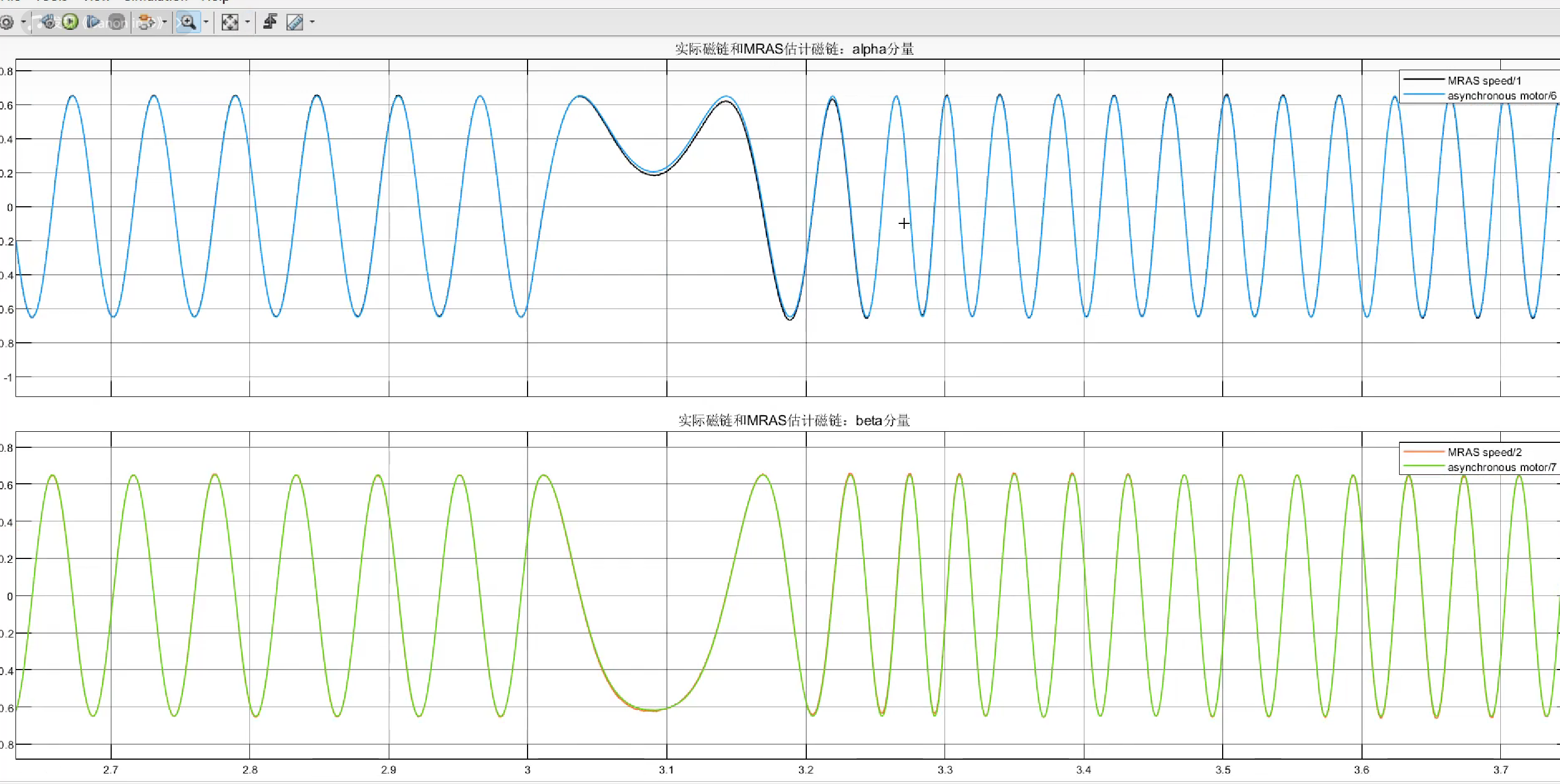
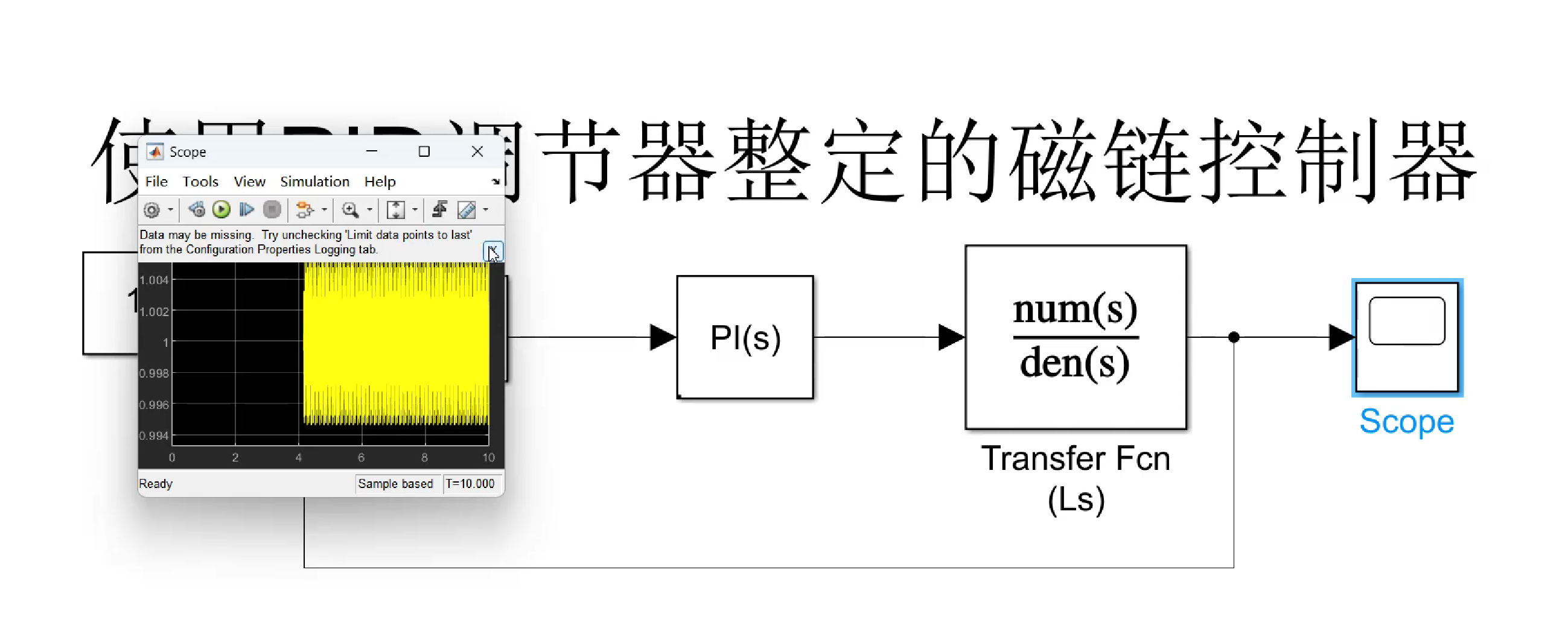
- 磁链观测精度:MRAS估计的磁链幅值与实际值误差小于2%,相位误差小于1°。
- 抗扰动能力:负载突变时,电流环调节时间小于0.02s,速度环恢复时间小于0.05s。
6 结论
本文提出基于MRAS的感应电机无感控制算法,通过MO法与SO法分别整定电流环与速度环,实现高动态响应与强鲁棒性。仿真结果表明,系统在全速域内具备高精度转速跟踪能力,抗负载扰动性能显著优于传统方法,为工业驱动应用提供了理论支持。
📚第二部分——运行结果
🎉第三部分——参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
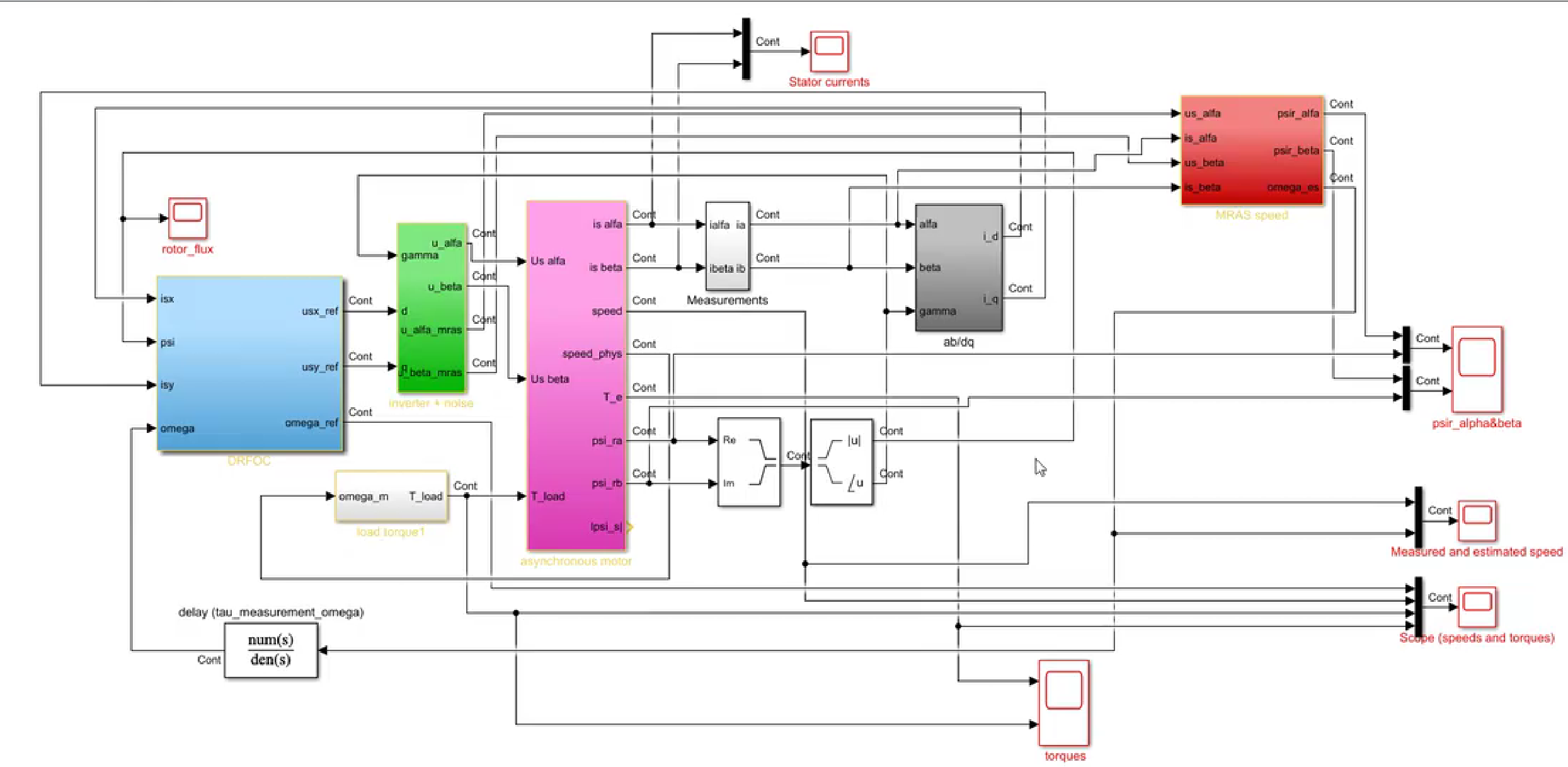
🌈第四部分——Simulink仿真实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 1468
1468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









