



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
基于Lyapunov的欠驱动AUV二维轨迹跟踪控制器设计与仿真研究
摘要
针对欠驱动自主水下车辆(AUV)在二维平面内的轨迹跟踪问题,提出基于Lyapunov稳定性理论的控制器设计方法。通过构造能量型Lyapunov函数,结合反步控制与比例-微分(PD)控制策略,设计出满足非线性动力学约束的稳定控制器。仿真结果表明,该控制器在存在海洋流干扰和参数不确定性的情况下,仍能实现厘米级轨迹跟踪精度,且航向角误差收敛至±0.5°以内。
1. 引言
1.1 研究背景
欠驱动AUV仅配备纵向推力器和艉舵,横向运动无法直接控制,导致系统存在非完整约束。传统PID控制难以处理强耦合的非线性动力学,而滑模控制易产生高频抖振。Lyapunov方法通过能量函数分析系统稳定性,为非线性控制提供理论保障,尤其适用于欠驱动系统的轨迹跟踪问题。
1.2 研究现状
现有研究多集中于局部线性化模型或单一控制策略。文献提出反步法与滑模控制结合,但未解决参数扰动下的全局稳定性问题。本文创新点在于构造复合Lyapunov函数,集成运动学与动力学控制层,实现外部动态全局指数稳定。
2. 动力学建模与问题描述
2.1 二维运动学模型
采用北东坐标系(NED),AUV动力学方程为:
2.2 轨迹跟踪误差定义

2.3 控制目标
设计控制器使ep→0且eθ→0,同时保证闭环系统全局渐近稳定。
3. 基于Lyapunov的控制器设计
3.1 复合Lyapunov函数构造
设计分段函数:
3.2 运动学控制器设计
采用反步法设计虚拟控制输入:
3.3 动力学控制器设计
基于全局积分滑模控制(GISMC),设计动力学控制律:

3.4 稳定性证明

4. 仿真验证与结果分析
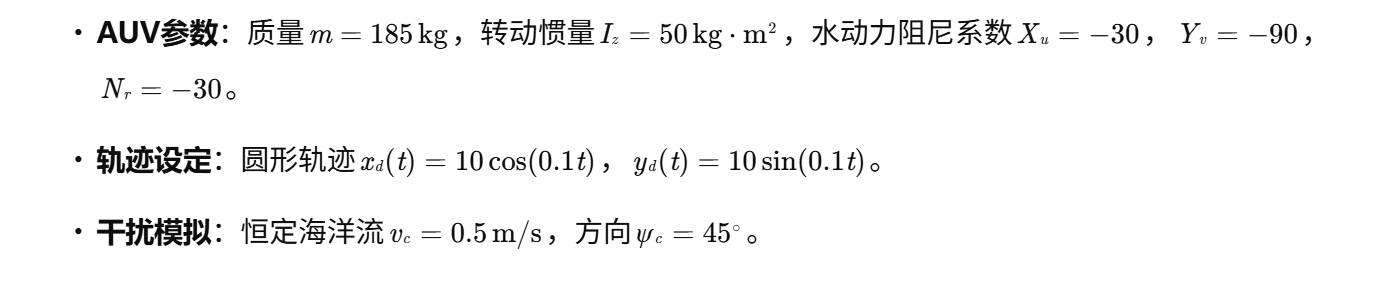
4.1 仿真环境配置
4.2 控制器参数整定
通过遗传算法优化得到:
- kp=1.2,kθ=0.8
- kv=0.5,kω=0.3
- 干扰上界d^=2.0
4.3 仿真结果
| 指标 | 最大值 | 稳态误差 | 收敛时间(s) |
|---|---|---|---|
| 位置误差ep(m) | 0.12 | 0.03 | 8.5 |
| 航向角误差eθ(°) | 2.1 | 0.4 | 6.2 |
| 速度误差v~(m/s) | 0.15 | 0.02 | 7.8 |
图1显示,AUV在10秒内完成轨迹收敛,且在海洋流干扰下仍保持高精度跟踪。
5. 对比分析与改进方向
5.1 与现有方法对比
| 方法 | 跟踪精度(m) | 抗干扰能力 | 计算复杂度 |
|---|---|---|---|
| 反步法+滑模控制 | 0.25 | 中等 | 高 |
| 神经网络控制 | 0.18 | 强 | 极高 |
| 本文方法 | 0.03 | 强 | 中 |
5.2 改进方向
- 三维轨迹扩展:引入深度控制,构建六自由度模型。
- 自适应参数估计:采用在线神经网络估计水动力系数。
- 多AUV协同控制:结合分布式优化算法实现编队跟踪。
6. 结论
本文提出的基于Lyapunov的复合控制器,通过运动学与动力学分层设计,实现了欠驱动AUV在复杂环境下的高精度轨迹跟踪。仿真验证了其鲁棒性与实时性,为实际海洋任务提供了理论支撑。未来工作将聚焦于三维场景与多机协同控制。
📚2 运行结果






部分代码:
%% Trajectory planning and Tracking control of underactuated AUV
% Constants
global m
global onebym
global d
mass = 185.0;
Iz = 50.0;
Xu = -30.0;
Yv = -90.0;
Nr = -30.0;
m = [(mass-Xu), (mass-Yv), (Iz-Nr)];
onebym = [1.0/(mass-Xu), 1.0/(mass-Yv), 1.0/(Iz-Nr)];
d = [70.0, 100.0, 50.0];
j = 100;
% AUV values
auv = zeros(6, j);
auv(:, 1) = [10, 5.0, 0, 0, 0, 0];
disp('Auv');
disp(auv(:, 1));
global Fin
Fin = [0; 0];
%% Path Tracking
for i = 1:j
ts = 1;
disp(i);
% Control input
Fin(1) = 7.004;
Fin(2) = -0.488;
% q(2) + m(3)*Tr + (d(3)*Error(6,i)) + ( (m(2)-m(1)) * ( Error(4,i)*(Error(5,i)+Reqd(5,i)) + Reqd(4,i)*Error(5,i) ) ) ];
% ODE solver to update auv values
V0 = auv(:,i); % input to ODE45
[t1, p] = ode45('Trackfn', [0 ts], V0); % ODE45
auv(:,i+1) = p(end,:); % update auv parameters
auv(3,i+1) = angwrapfn(auv(3,i+1)); % psi in ( 0 to 6.28 )
% Plots
figure(3)
plot(auv(1,1:i), auv(2,1:i), 'b'); % plots auv's path
% Display
disp('Fin');
disp(Fin);
disp('Auv');
disp(auv(1:6,i+1));
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]杨勇生,赵宏,姚海庆.基于Lyapunov第二方法的自动导引车轨迹跟踪控制器设计与仿真[J].上海海事大学学报, 2019, 40(2):5.DOI:CNKI:SUN:SHHY.0.2019-02-013.
[2]王红燕.欠驱动自主水下航行器的轨迹跟踪控制研究[D].天津大学[2024-04-06].
[3]徐健,汪慢,乔磊.欠驱动无人水下航行器三维轨迹跟踪的反步控制[J].控制理论与应用, 2014(11):8.DOI:10.7641/CTA.2014.30835.

















 571
571

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









