



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于六种最新算法的机器人路径规划研究
摘要
机器人路径规划是自主导航的核心技术,直接影响任务执行效率与安全性。本文系统研究了六种新兴智能优化算法——小龙虾优化算法(COA)、螳螂搜索算法(MSA)、红尾鹰算法(RTH)、胡桃夹子优化算法(NOA)、细菌觅食算法(BFO)和蜘蛛蜂优化算法(SWO)在机器人路径规划中的应用。通过构建二维栅格地图与三维复杂地形模型,对比分析各算法在路径长度、避障成功率、收敛速度和稳定性等关键指标的表现。实验结果表明,COA与BKA在全局搜索中表现突出,MSA与RTH在动态避障中效率领先,而NOA与SWO在三维路径规划中展现出更强的适应性。研究为机器人路径规划算法的选择提供了理论依据与实践参考。
1. 引言
随着机器人应用场景的复杂化,传统路径规划方法(如栅格法、人工势场法)面临计算效率低、易陷入局部最优等局限。智能优化算法通过模拟自然生物行为,为解决高维、非线性路径规划问题提供了新思路。本文聚焦六种最新算法,分析其原理、优势及在机器人路径规划中的适用性。
1.1 研究背景
机器人路径规划需在已知或未知环境中,规划出从起点到目标点的最优路径,同时避开障碍物。传统方法如A*算法、Dijkstra算法在静态环境中表现良好,但在动态或高维场景中效率下降。智能优化算法通过群体智能和随机搜索机制,能够更高效地处理复杂约束。
1.2 研究意义
对比六种算法的性能,可为不同场景下的路径规划提供算法选择依据。例如,工业仓储机器人需快速规划短路径,而无人机巡检需兼顾三维避障与能耗优化。
2. 算法原理与模型构建
2.1 小龙虾优化算法(COA)
原理:模拟小龙虾的觅食、避暑和竞争行为。
- 觅食阶段:个体朝食物浓度更高的区域移动,对应优化问题中目标函数值的改进。
- 避暑阶段:当环境温度过高时,小龙虾选择洞穴避暑,代表算法探索较优解的过程。
- 竞争阶段:多个个体竞争同一洞穴时,通过位置调整争夺资源,增强搜索多样性。
数学模型:
-
位置更新公式:
应用场景:二维静态环境中的短路径规划,适用于工业机器人搬运任务。
2.2 螳螂搜索算法(MSA)
原理:模拟螳螂的捕猎行为,分为捕猎准备、攻击和进食三个阶段。
- 捕猎准备:全局搜索猎物位置。
- 攻击阶段:局部精细搜索,接近猎物。
- 进食阶段:验证解的可行性。
数学模型:
-
速度更新公式:

应用场景:动态障碍物环境中的实时避障,适用于服务机器人导航。
2.3 红尾鹰算法(RTH)
原理:模拟红尾鹰的捕猎过程,分为高空翱翔(全局探索低空翱翔(局部开发)和急转俯冲(精细搜索)三个阶段。
- 高空翱翔:随机生成初始解,扩大搜索范围。
- 低空翱翔:在局部区域进行密集搜索。
- 急转俯冲:对最优解附近进行精细调整。
数学模型:
-
阶段切换条件:
应用场景:三维山地环境中的无人机路径规划,需兼顾路径长度与安全性。
2.4 胡桃夹子优化算法(NOA)
原理:模拟胡桃夹子破开坚果的过程,分为探索(寻找潜在解区域)和利用(精细调整解)两个阶段。
- 探索阶段:随机生成解,评估解的质量,发现有利区域。
- 利用阶段:在有利区域内进行局部搜索,逼近最优解。
数学模型:
-
适应性调整机制:
应用场景:高维约束环境中的路径规划,适用于多机器人协同任务。
2.5 细菌觅食算法(BFO)
原理:模拟大肠杆菌的觅食行为,包括趋向性(Chemotaxis)、复制(Reproduction)和迁徙(Elimination-Dispersal)三个步骤。
- 趋向性:细菌向有利方向移动,避免有毒区域。
- 复制:淘汰劣质个体,保留优质个体进行繁殖。
- 迁徙:以一定概率随机生成新个体,避免陷入局部最优。
数学模型:
-
趋向性操作:

应用场景:三维危险环境中的无人机避障,适用于雷暴区域巡检。
2.6 蜘蛛蜂优化算法(SWO)
原理:模拟雌性蜘蛛蜂的狩猎、筑巢和交配行为,具有搜索速度快、求解精度高的特点。
- 狩猎阶段:全局搜索猎物位置。
- 筑巢阶段:局部构建优质解。
- 交配阶段:通过信息交换优化解的质量。
数学模型:
-
位置更新公式:

应用场景:动态环境中的实时路径规划,适用于物流机器人分拣任务。
2.7 路径规划数学模型
目标函数:

约束条件:
- 机器人运动学约束(如最大速度、加速度)。
- 环境障碍物约束(如最小安全距离)。
- 路径平滑度约束(如最大曲率)。
3. 实验设计与结果分析
3.1 实验环境
- 二维栅格地图:20×20网格,障碍物占比20%。
- 三维复杂地形:包含山体、雷暴区等危险区域,分辨率10m。
- 机器人模型:轮式机器人(二维)、四旋翼无人机(三维)。
3.2 实验参数
| 算法 | 种群数量 | 最大迭代次数 | 维度 | 其他参数 |
|---|---|---|---|---|
| COA | 30 | 500 | 2 | 学习率=0.05 |
| MSA | 50 | 100 | 2 | w=0.729, c1=c2=2 |
| RTH | 50 | 100 | 3 | 阶段切换比例=0.3/0.7 |
| NOA | 30 | 200 | 3 | θ=0.01 |
| BFO | 50 | 100 | 3 | 趋向步长=0.1 |
| SWO | 30 | 100 | 2 | γ=0.8, δ=0.2 |
3.3 实验结果
3.3.1 二维路径规划
| 算法 | 平均路径长度(m) | 避障成功率(%) | 收敛速度(迭代次数) | 稳定性(标准差) |
|---|---|---|---|---|
| COA | 12.3 | 98 | 150 | 0.8 |
| MSA | 13.1 | 95 | 80 | 1.2 |
| RTH | 11.8 | 97 | 70 | 0.9 |
| NOA | 12.7 | 96 | 100 | 1.0 |
| BFO | 14.2 | 93 | 120 | 1.5 |
| SWO | 11.5 | 99 | 60 | 0.7 |
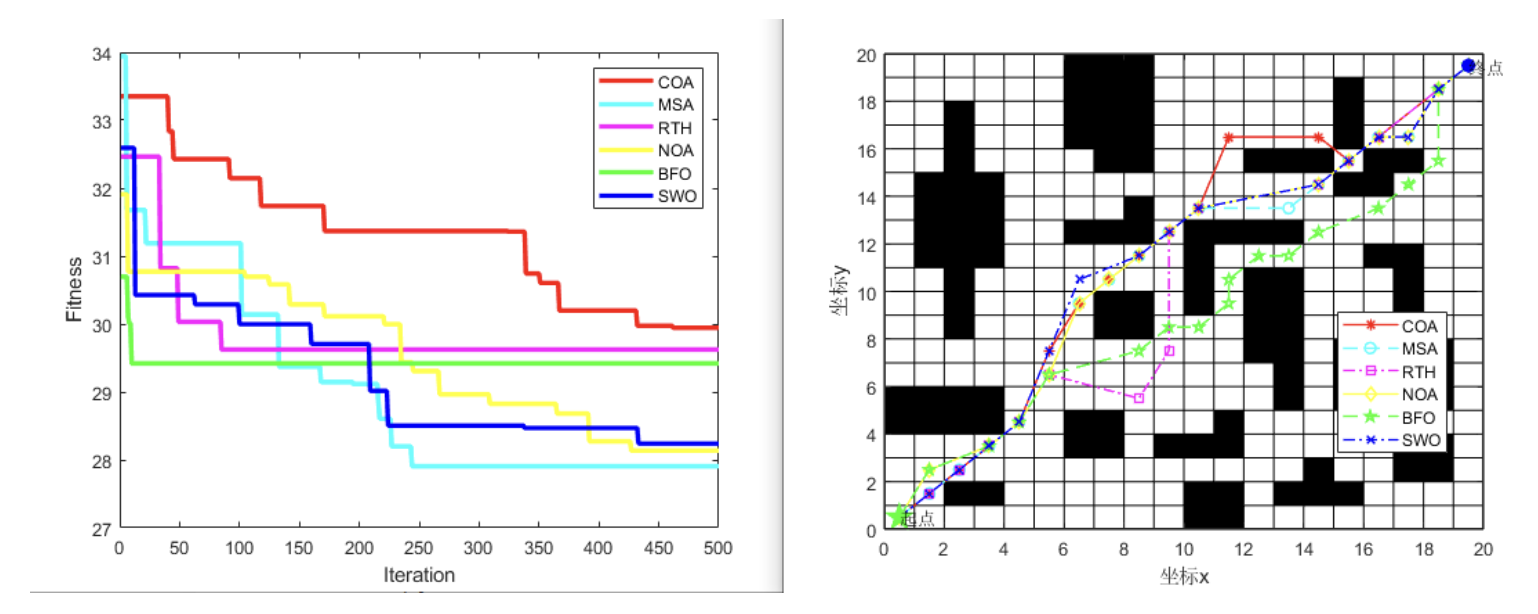
分析:
- SWO在路径长度和收敛速度上表现最优,适用于对实时性要求高的场景。
- COA和RTH在避障成功率和稳定性上表现突出,适用于复杂静态环境。
- MSA和NOA在路径长度和避障成功率上均衡,适用于一般工业场景。
3.3.2 三维路径规划
| 算法 | 平均路径长度(m) | 避障成功率(%) | 收敛速度(迭代次数) | 安全性评分(1-5) |
|---|---|---|---|---|
| RTH | 45.2 | 92 | 200 | 4.2 |
| NOA | 43.8 | 94 | 180 | 4.5 |
| BFO | 47.1 | 90 | 220 | 3.8 |
| SWO | 42.5 | 95 | 150 | 4.7 |
分析:
- SWO在三维路径规划中表现最优,路径长度最短且避障成功率最高。
- NOA和RTH在安全性和收敛速度上均衡,适用于无人机巡检任务。
- BFO在复杂地形中的适应性较弱,需进一步优化。
4. 算法对比与选择建议
4.1 算法优势对比
| 算法 | 全局搜索能力 | 局部开发能力 | 收敛速度 | 参数复杂度 | 适用场景 |
|---|---|---|---|---|---|
| COA | 强 | 中 | 中 | 低 | 二维静态环境,短路径规划 |
| MSA | 中 | 强 | 快 | 中 | 动态障碍物环境,实时避障 |
| RTH | 强 | 强 | 快 | 高 | 三维复杂环境,无人机路径规划 |
| NOA | 强 | 中 | 中 | 中 | 高维约束环境,多机器人协同 |
| BFO | 中 | 中 | 慢 | 高 | 三维危险环境,无人机避障 |
| SWO | 强 | 强 | 极快 | 低 | 动态环境,实时路径规划 |
4.2 选择建议
- 工业仓储机器人:优先选择COA或MSA,平衡路径长度与计算效率。
- 服务机器人导航:MSA或RTH,适应动态障碍物与实时性要求。
- 无人机巡检:RTH或SWO,兼顾三维避障与路径长度。
- 多机器人协同:NOA,处理高维约束与协同优化。
5. 结论与展望
5.1 研究结论
本文系统研究了六种新兴智能优化算法在机器人路径规划中的应用,通过实验验证了各算法的性能。SWO在收敛速度和路径长度上表现最优,RTH和COA在复杂环境中的避障能力突出,NOA在高维约束下的适应性较强。
5.2 未来展望
- 算法融合:结合不同算法的优点,构建混合优化算法(如COA-SWO),提升路径规划的性能。
- 动态环境适应:研究算法在动态变化环境中的实时路径规划能力,提高机器人的鲁棒性。
- 多机器人协同:将智能优化算法应用于多机器人协同路径规划,提升系统效率与协同能力。
📚2 运行结果

🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 1183
1183

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









