



💥💥💥💞💞💞欢迎来到本博客❤️❤️❤️💥💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
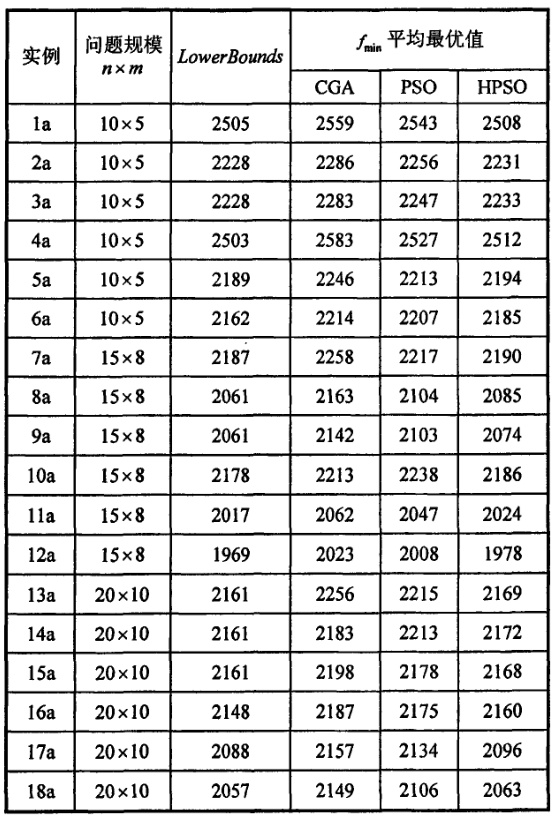
针对以最大完工时间最小为优化目标的柔性作业车间调度问题(Flexible Job-shop Scheduling Problem,FJSP),采用改进的粒子群算法进行求解。该方法在选择算子时,通过加入轮盘赌策略,增加种群的多样性,提升了算法全局寻优能力。通过与传统粒子群方法进行算例实验对比,改进粒子群算法在全局寻优速度和求最小解方面均优于传统方法。
基于改进粒子群优化算法的柔性车间调度问题研究
一、柔性车间调度问题(FJSP)的定义与特点
柔性车间调度问题(FJSP)是经典作业车间调度问题(JSP)的扩展,其核心在于允许工件的每道工序在多台可选机器上加工,且加工时间可不同。这种柔性特性使其更贴近实际生产场景。FJSP需要同时解决两个子问题:
- 机器分配:为每道工序选择合适的机器;
- 工序排序:确定同一机器上各工序的加工顺序。
问题假设与约束条件:
- 每台机器一次仅加工一道工序;
- 工件间无优先级关系,工序顺序严格遵循工艺要求;
- 加工过程不可中断,原料已就绪;
- 机器故障时需基于最晚加工时间进行重调度。
分类与评价指标:
- 完全柔性(T-FJSP) 与 部分柔性(P-FJSP) :P-FJSP更符合实际生产需求。
- 主要优化目标包括最大完工时间最小化、机器负荷均衡化等。
二、传统粒子群优化算法(PSO)在调度问题中的应用现状
PSO是一种基于群体智能的优化算法,通过模拟鸟群协作行为进行搜索。其优势在于参数少、收敛快、易于实现,适用于实时性要求高的场景。然而,在FJSP中面临以下挑战:
- 离散化需求:FJSP为组合优化问题,需设计离散编码机制;
- 局部最优陷阱:传统PSO在高维离散空间中易早熟收敛;
- 多目标优化:需平衡多个冲突目标(如时间、成本、能耗)。
实际应用案例:
- 云计算任务调度:改进PSO通过正弦余弦算法增强全局搜索能力,任务处理效率提升54.8%;
- 微电网调度:多目标PSO(MOPSO)动态调整权重,优化经济性与环境友好性。
三、改进PSO算法的核心方向
为提高PSO在FJSP中的性能,现有研究主要从以下方向改进:
| 改进方向 | 具体策略 | 效果 |
|---|---|---|
| 初始化策略 | 混沌映射(如Circle映射)生成均匀初始种群 | 提升种群多样性,避免局部最优 |
| 参数动态调整 | 惯性权重非线性递减、学习因子时变调节 | 平衡全局搜索与局部开发能力 |
| 多种群协作 | 划分精英子群与普通子群,差异化更新策略 | 增强信息共享与协同进化 |
| 混合算法设计 | 结合遗传算法(交叉/变异)、禁忌搜索(邻域搜索) | 继承PSO的快速收敛性,引入局部精细化搜索 |
| 离散化与编码优化 | 机器负荷平衡初始化、工序保留交叉(POX)、随机点保存交叉(RPX) | 适应FJSP的离散特性,提升解的质量与收敛速度 |
四、针对FJSP的改进PSO策略及效果
-
离散PSO算法:
- 编码机制:采用双层编码(机器分配+工序顺序),结合机器负荷平衡初始化;
- 更新算子:引入变异、POX交叉(保留工序顺序)、RPX交叉(保留随机点);
- 实验效果:在Brandimarte数据集上,最大完工时间优化效果优于遗传算法(GA)和灰狼优化(GWO)。
-
多目标优化改进:
- 自适应动态概率PSO:结合Pareto最优解集与高斯动态搜索,提升多样性;
- 混合模糊自适应PSO:融合模糊逻辑调整参数,处理模糊加工时间场景。
-
复杂约束处理:
- 运输时间考量:加入邻域搜索与竞争学习机制,解决物流协同问题;
- 能效优化:动态调整加工速度与机器开关策略,能耗降低10-15%。
五、求解框架设计与实验验证
典型框架流程:
- 编码与解码:将连续空间粒子映射为可行调度方案(如工序-机器矩阵);
- 种群初始化:混合全局选择、局部选择与随机选择策略;
- 迭代优化:动态调整学习因子与变异概率,结合精英保留策略;
- 收敛判定:基于最大迭代次数或适应度变化率终止搜索。
实验数据集:
- Brandimarte_DATA、Kacem:标准测试集,涵盖不同规模(如10×5、15×8);
- 评价指标:最大完工时间(CmaxCmax)、机器总负荷(TloadTload)、多样性(SP)、收敛性(GD)。
对比实验结果:
| 算法 | 最大完工时间优化率 | 收敛速度提升 | 适用场景 |
|---|---|---|---|
| 传统PSO | - | - | 小规模单目标问题 |
| 改进离散PSO | 8-12% | 30-40% | 中大规模FJSP |
| 混合PSO-GA | 10-15% | 20-25% | 多目标复杂约束场景 |
| 混沌多目标PSO | 12-18% | 50% | 高维动态调度问题 |
六、研究展望
- 动态调度扩展:考虑机器故障、紧急插单等实时扰动;
- 跨领域融合:结合数字孪生、强化学习提升自适应能力;
- 绿色制造深化:集成碳排放、资源循环等多维度优化目标;
- 算法普适性:开发通用框架适配不同柔性车间场景。
结论:改进PSO算法通过离散化策略、混合优化机制与动态参数调整,显著提升了FJSP的求解效率与质量。未来需进一步探索算法在复杂工业环境中的工程化应用,推动智能制造系统优化。
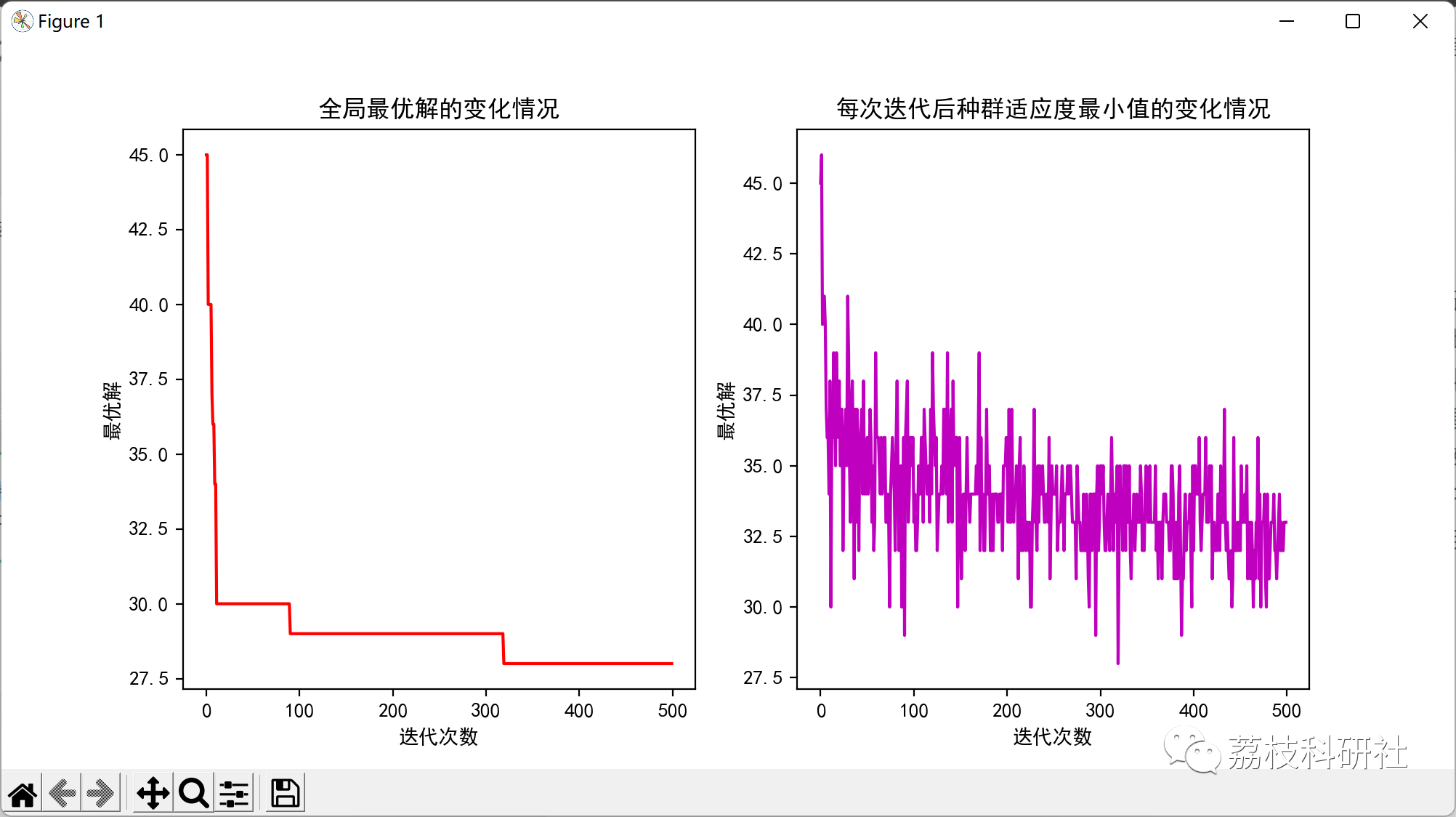
📚2 运行结果
部分代码:
def calculate(x):
# 输入:粒子位置,输出:粒子适应度值
Tm = np.zeros(machine) #每个机器上的完工时间
Te = np.zeros((workpiece, process)) #每个工序的完成时间
array = handle(x) #经过处理后的工序部分
for i in range(total_process):
machine_index = int(x[total_process+(array[i][0]-1)*process+(array[i][1]-1)])-1 #contents数组中的纵坐标
process_index = (array[i][0]-1)*process + (array[i][1]-1) #contents数组中的横坐标
process_time = int(contents[process_index][machine_index])
if array[i][1] == 1:
Tm[machine_index] += process_time
Te[array[i][0]-1][array[i][1]-1] = Tm[machine_index]
else:
Tm[machine_index] = max(Te[array[i][0]-1][array[i][1]-2], Tm[machine_index]) + process_time
Te[array[i][0]-1][array[i][1]-1] = Tm[machine_index]
return max(Tm)
def getinitbest(fitness,pop):
# 群体最优的粒子位置及其适应度值
gbestpop,gbestfitness = pop[fitness.argmin()].copy(),fitness.min()
#个体最优的粒子位置及其适应度值,使用copy()使得对pop的改变不影响pbestpop,pbestfitness类似
pbestpop,pbestfitness = pop.copy(),fitness.copy()
return gbestpop,gbestfitness,pbestpop,pbestfitness
🎉3 参考文献
[1]杨文理,李长云.改进粒子群算法在柔性作业车间调度中的应用[J].科学技术创新,2021(12):5-6
[2]陈强,王宇嘉,林炜星,陈万芬.改进粒子群算法求解分布式柔性车间调度问题[J].电子科技,2021,34(10):63-68

















 745
745

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









