





智能梯控技术2026年这一领域确实迎来了技术融合与场景落地的爆发期,从多模态认证到机器人协同,每个方向都充满创新可能。
🚀 2026年智能梯控核心发展方向
1. 多模态认证技术深度融合
- 技术突破:人脸识别(活体检测+温度筛查)、动态二维码(防伪造)、IC/CPU卡(加密升级)、虹膜/指纹等生物识别技术将形成“组合拳”,支持“人脸+刷卡+密码”多重验证,适配不同场景安全需求(如高端写字楼采用虹膜+人脸双因子认证,老旧小区保留IC卡基础功能)。
- 案例:多奥科技等厂商已推出支持99%电梯品牌的兼容机型,实现“一脸通”集成门禁、梯控、停车场等10+场景权限。
2. AI驱动的智能派梯与运力优化
- 动态调度算法:基于时空窗预约制、人流预测模型(如早高峰优先响应高流量楼层),电梯运行效率提升40%以上,等待时间缩短至20秒内。
- 人机协同机制:为AGV/机器人设置优先调度时段,例如物流园区在夜间自动分配专属电梯,避免与人员乘梯冲突。
3. 机器人(AGV/AMR)自主乘梯系统普及
- 非侵入式改造:通过继电器矩阵、微波雷达+激光测距传感器(毫米级精度)控制电梯,无需修改原有PLC系统,单电梯改造成本8-20万元。
- 应用场景:医院物资运输、仓储物流自动分拣,例如京东亚洲一号仓已实现AGV通过梯控系统跨楼层转运货物。
4. 绿色节能与智能运维
- 能耗优化:夜间自动切换节能模式(降低待机功率)、动态调整电机输出(如空载时降速),年省电可达30%。
- 预测性维护:通过振动传感器、AI故障诊断模型提前预警轴承磨损、钢丝绳老化等问题,维修响应时间从24小时压缩至2小时。
5. 跨系统联动与智慧社区集成
- 可视对讲+梯控联动:访客通过楼宇对讲主机扫码/人脸识别后,系统自动授权电梯到达指定楼层,无需人工登记。
- 一码通生态:集成门禁、停车、消费等功能,例如深圳某智慧社区实现“刷脸进小区→自动呼梯→电梯直达家门口”全流程无感通行。

{ "cmd": "call_elevator", "target_floor": 5, "priority": "high", "timestamp": 1630000000, "sign": "a1b2c3d4e5" }
核心技术演进方向
1. 身份认证:多模态融合成主流
- 全场景识别矩阵:2026 年国标《电梯用智能识别装置》(5 月实施) 明确支持人脸 + 二维码 + IC/CPU 卡 + NFC + 语音五合一识别,取代单一认证模式
- 安全升级:活体检测精度达FAR≤0.0001%,动态二维码 "一次一码" 防复制,国密 SM2/SM4 算法成为标配
- 无感化体验:3D 结构光人脸识别响应 < 0.3 秒,支持戴口罩识别;语音识别支持 28 种方言,准确率 98.2%
| 认证方式 | 2026 年技术亮点 | 适用场景 |
|---|---|---|
| 人脸识别 | 三维活体 + 口罩识别 + 红外补光 | 高端写字楼、智慧社区 |
| 二维码 | 动态生成 + 时间戳 + 密钥 + 离线验证 | 临时访客、公共建筑 |
| CPU 卡 | 国密加密 + 防复制 + 分层授权 | 政府机构、金融中心 |
| NFC | 手机 / 手表无感刷卡 + 远程权限管理 | 住宅小区、企业园区 |
2. 系统架构:云边端协同深度融合
- 边缘计算普及:2026 年云端边缘协同架构普及率达55%,2030 年将升至 75%,实现毫秒级响应与断网自治
- 双链路通信:RS485 + 无线 (WiFi/4G/5G) 备份,避免单点故障;支持 MQTT/TCP 主流协议,对接楼宇 BMS 系统
- 数据安全:差分隐私、联邦学习技术应用占比提升至 12%,保护生物识别数据与乘梯隐私
3. AI 调度:从被动响应到主动预测
- 智能派梯 2.0:基于人流热力图 + 历史数据 + 实时请求三模预测,高峰期运力提升 30-50%
- 多梯群控优化:支持每秒处理 2000 条以上运行数据,群控系统兼容 8 台以上电梯协同调度
- 节能算法:动态调整运行策略,非高峰时段减少待机能耗 25%,2026 年绿色认证产品占比达 60%

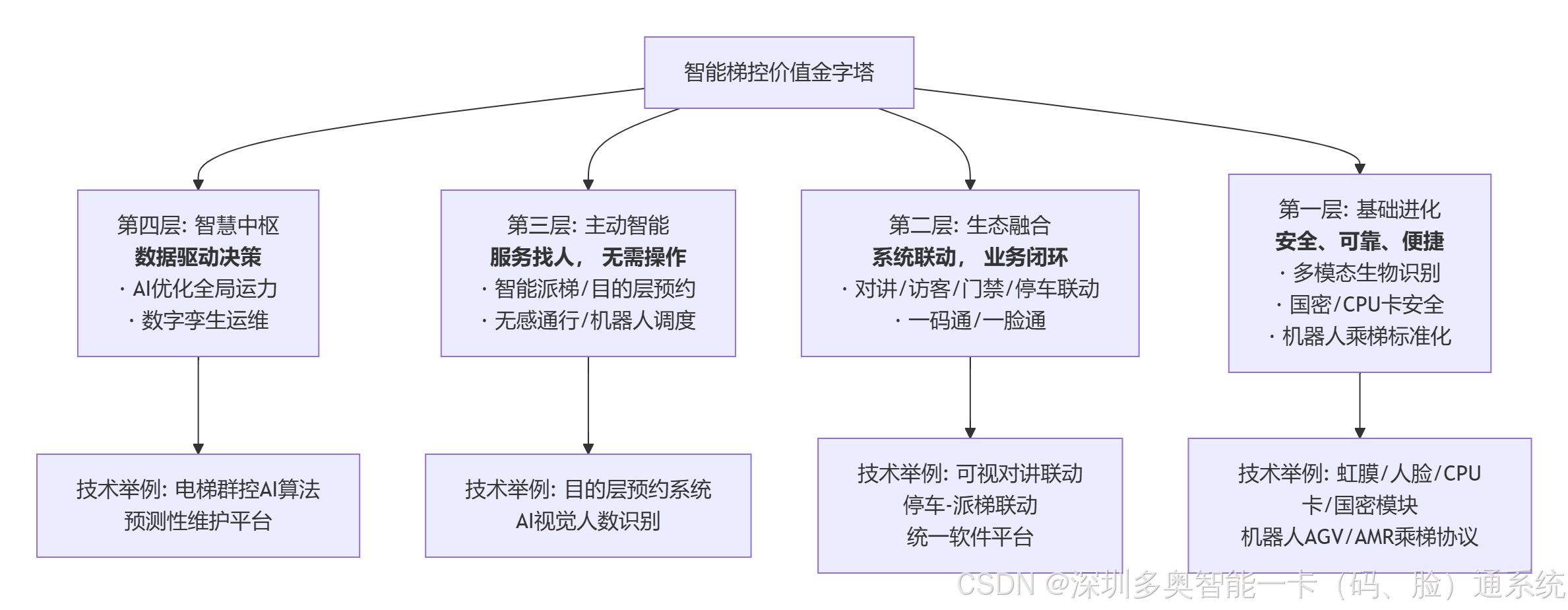
graph TD
A[智能梯控价值金字塔] --> B1[第四层: 智慧中枢<br>**数据驱动决策**<br>· AI优化全局运力<br>· 数字孪生运维]
A --> B2[第三层: 主动智能<br>**服务找人, 无需操作**<br>· 智能派梯/目的层预约<br>· 无感通行/机器人调度]
A --> B3[第二层: 生态融合<br>**系统联动, 业务闭环**<br>· 对讲/访客/门禁/停车联动<br>· 一码通/一脸通]
A --> B4[第一层: 基础进化<br>**安全、可靠、便捷**<br>· 多模态生物识别<br>· 国密/CPU卡安全<br>· 机器人乘梯标准化]
B4 --> C1[技术举例: 虹膜/人脸/CPU卡/国密模块<br>机器人AGV/AMR乘梯协议]
B3 --> C2[技术举例: 可视对讲联动<br>停车-派梯联动<br>统一软件平台]
B2 --> C3[技术举例: 目的层预约系统<br>AI视觉人数识别]
B1 --> C4[技术举例: 电梯群控AI算法<br>预测性维护平台]
📈 二、数据驱动:从控制权限到优化运力与健康预测
电梯成为楼宇物联网的重要数据节点。
-
AI智能派梯:基于历史客流、实时召唤、人员目的地(通过闸机或预约),利用机器学习算法动态分组派梯,高峰期可提升20%-40% 的运输效率。
-
预测性维护:通过传感器实时监测电梯运行状态(平层精度、振动、噪声),结合云端大数据分析,实现故障预警,变“被动维修”为“主动保养”。
-
数字孪生与仿真:在虚拟空间中构建电梯运行模型,用于模拟极端客流、测试调度策略,并为应急疏散提供决策支持。
graph TD
A[施工准备] --> B[电梯打检修/断电]
B --> C[安装读头]
C --> D[开孔/明装人脸识别机]
D --> E[布放线缆]
E --> F[RVV 3*2.5mm²屏蔽线]
F --> G[连接控制器]
G --> H[取电接线]
H --> I[对接电梯按钮线]
I --> J[通电调试]
J --> K[功能测试]
K --> L[恢复运行]
| 步骤 | 操作内容 | 技术要点 |
|---|---|---|
| 1 | 轿厢顶设备安装 | 采用304不锈钢螺栓(M8×25mm)固定主控制箱于轿顶防护栏,间距≤30cm,加装防震胶垫。优先从检修盒独立断路器取电(加装10A保险丝),禁止与轿厢照明回路共用。 |
| 2 | 楼层检测系统部署 | 每层导轨侧安装光电平层传感器(精度±3mm),井道壁粘贴UHF 860-960MHz RFID标签(平层状态)。首层平层板粘贴N52钕铁硼磁铁(尺寸20×10×3mm),磁场强度≥1200高斯。 |
| 3 | 无线通信部署 | 轿顶与井道顶部对角部署电梯专用5GHz无线网桥(吞吐量450Mbps),避免金属遮挡(信号衰减<-70dBm)。 |
| 4 | 读卡器安装(人机混用场景) | 嵌入式安装需开88×56mm金属面板孔或90×58mm玻璃面板孔,使用硅胶密封圈(耐温-40℃~120℃)防护。 |
[电梯控制器] │ ├─电源线(220V)→ 独立电源箱(勿接UPS) ├─RS485线→ 人脸识别终端 ├─干触点线→ 楼层扩展器 ├─控制线(aa/bb/cc)→ 按键转接板 [楼层扩展器] │ ├─输入端(RVV4*0.2)→ 控制器输出 ├─输出端(截断原按键线)→ 电梯按键板 [状态检测器] │ ├─对射传感器线→ 电梯门机凸轮 ├─信号线(RVV2*0.2)→ 控制器输入


















 757
757

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











