



探讨一下AGV机器人和AMR与电梯控制系统(梯控)高效对接的方法和技术。
前言:为了实现精准对接,梯控需引出485通讯线连接到机器人控制器,确保信号传输稳定,减少干扰和延迟。电梯梯控与机器人/AGV/AMR联动器的电源应分开设置,RS-485通讯既可点对点也可通过485HUB实现多设备间的灵活通信,适应多种场景下的电梯资源共享需求。此外,通过网线与现场AP建立TCP/IP、HTTP或modbus-tcp或RTU等协议的局域网连接,保障数据传输的高速稳定,并支持系统的升级和扩展。最后展望了未来技术的发展将使对接更加智能化,提高生产生活的便利性和效率。

一,AMR机器人AGV自动乘梯所需的配置清单。
包括电梯状态检测器(DAIC-DT-ZT),用于实时监测电梯运行状态并及时报警;楼层传感器(DAIC-DT-LC),采用U感技术精准感知轿厢所在楼层;机箱(DAIC-DT-JX),为电子元件提供安全稳定的工作环境;电源(DAIC-DT-P),保障检测设备的电力供应;呼梯控制器(DAIC-DT-WH),通过RS-485组网实现准确调度;电源及485线(RVV4*0.2)、外呼按键线(RVV2*0.2),确保电源和信号的可靠传输;无线收发器(DAIC-DT-WXSF),用于远程传输电梯运行状态;外呼机箱电源(DA-02/12V/5A),为外呼系统提供稳定电力;无线中继器(DAIC-DT-ZJ),增强无线信号覆盖范围;以及协议对接的收费规则。

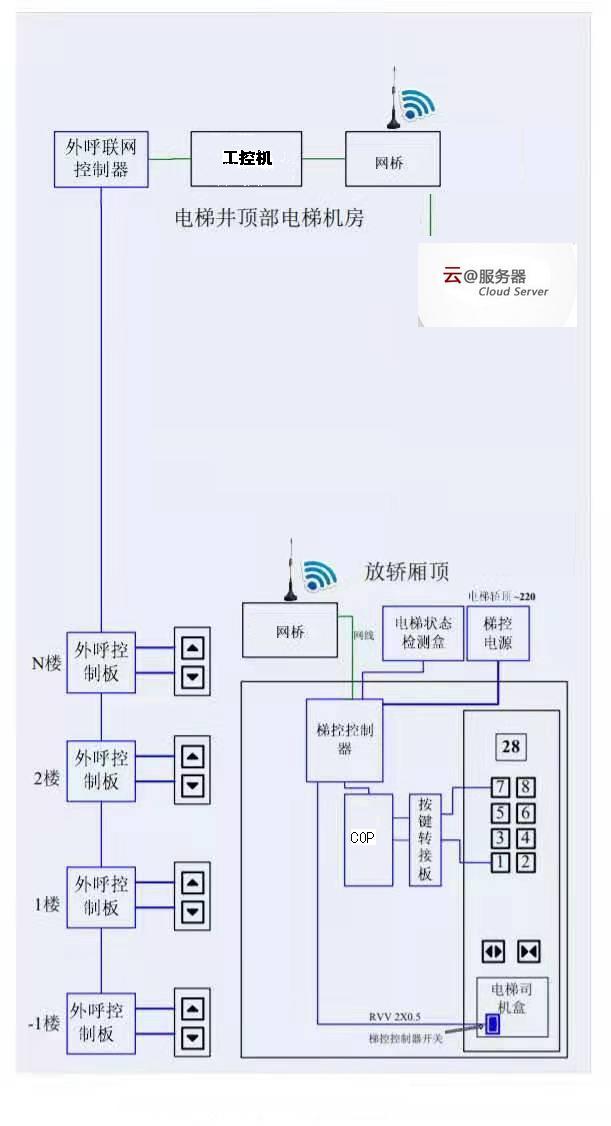
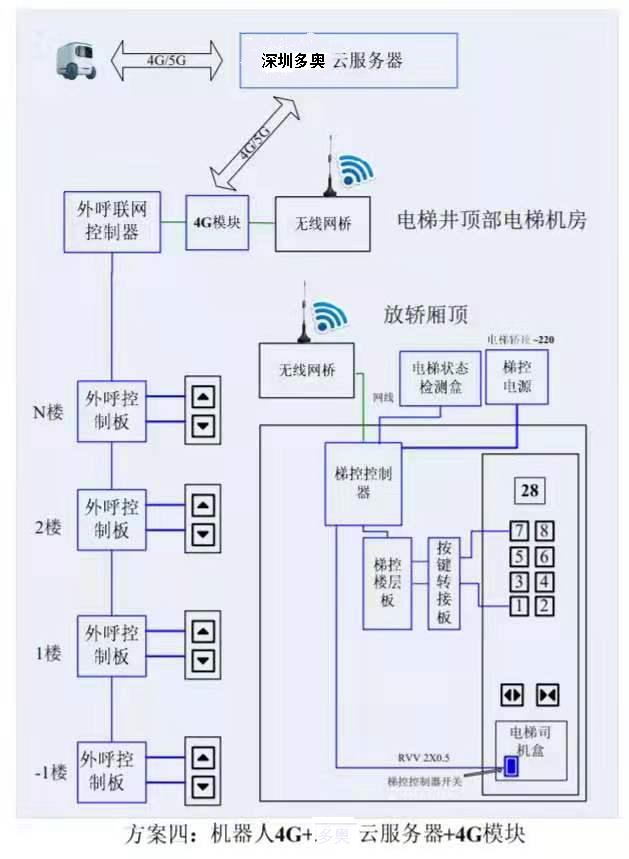
二,深入解析了智能电梯协同AMR机器人AGV自动乘梯系统的设备构成、空间布局及其优化方法。
首先,介绍了核心感知中枢,包括电梯状态检测器、楼层传感器等设备的功能和安装位置;其次,阐述了智能通信网络,强调呼梯控制器和无线收发器在通信中的关键作用;再者,分析了能源与信息脉络,如轿厢顶电源和定制线缆的作用;接着,提出了信号强化矩阵的概念,无线中继器用于增强高层建筑的信号传输。此外,还探讨了协议对接的经济哲学、工程实施中的电力安全冗余和电磁和谐之道、典型场景配置以及系统的定期维护方法。最后,提供了针对不同品牌AGV/AMR的定制化技术服务。
总结:详细解析了AMR机器人AGV自动乘梯系统的电梯外呼内召及轿厢运行状态监测设备清单,涵盖设备功能、安装要点及潜在需求。核心设备包括电梯状态检测器、楼层传感器、呼梯控制器和无线收发器等,分别负责实时监测电梯状态、精准定位楼层、管理和传输信号。针对高层建筑,建议配置无线中继器以增强信号覆盖。文中还介绍了协议对接的成本优化策略,强调了安装实施中的电源冗余设计、电磁兼容性和无线信号测试的重要性,并提供了典型应用场景配置示例和维护注意事项。

三,机器人/AGV/AMR 如何顺利切换乘梯的梯控专用模式或人工模式。
要实现模式切换,需持有有效梯控卡的员工在外呼电梯门禁读卡器处刷卡,而机器人则可通过485通讯、TCP/IP、HTTP协议或modbus-tcp等方式申请使用电梯并完成模式切换。针对非标模式的人工切换,如人机混用、员工专用或AGV/AMR专用,文中列举了AGV电梯控制主板的权限管理、楼层触点扩展板对按键权限的管控、电梯状态检测器监测轿厢状态、U感技术的楼层传感器、按键控制线连接楼层、层控机箱电源位置、无线收发器设置、外呼控制器管控权限、AGV模式切换读卡器的位置及外呼电源箱的安放位置等具体设施与功能。
四,让AMR机器人AGV自动乘梯意义
为何要让AMR机器人AGV自动乘梯即使用垂直交通工具电梯呢?
①解决AGV机器人和AMR在实际应用中与电梯控制系统的对接问题;
②提升不同场景下如工厂、办公楼等场所的运输效率和自动化水平。
使用场景及目标:
①帮助技术人员了解AMR机器人AGV自动乘梯所需的核心硬件配置且帮助技术人员理解智能电梯与AGV/AMR机器人的协同工作原理;
②指导项目实施,确保各部件正确选型和安装,指导设备选型、安装和维护,确保系统稳定运行;
③为项目经理提供成本估算依据,特别是针对协议对接费用的理解,为项目规划提供参考,优化资源配置和技术方案设计。;
五,其他说明:了解这些设施与功能有助于提高机器人/AGV/AMR乘梯的安全性和效率,确保其在不同模式下的稳定运行。在实际应用中,应根据项目具体情况灵活调整设施配置。
六,十几年老司机专业建议:本文内容详实,涵盖了从设备选型到系统维护的全流程,建议读者结合实际应用场景,重点关注设备安装位置、信号传输优化及定期维护的具体措施,同时可根据自身需求选择合适的协议对接和服务方案,还有不明白的可咨询多奥售前,免费羊毛可以薅。


















 1312
1312

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











