




 本文由21届985研究生分享,介绍了Faster R-CNN的目标检测原理,重点讲解了RPN网络的作用、实现细节及损失函数。RPN通过滑动窗口在特征图上提取候选框,并使用多任务损失进行训练。此外,还讨论了anchor box的选择及其在训练中的重要性。
本文由21届985研究生分享,介绍了Faster R-CNN的目标检测原理,重点讲解了RPN网络的作用、实现细节及损失函数。RPN通过滑动窗口在特征图上提取候选框,并使用多任务损失进行训练。此外,还讨论了anchor box的选择及其在训练中的重要性。
作者丨灯会
来源丨极市平台
编辑丨极市平台
本文为极市平台原创,转载须经授权并注明来源
作者灯会为21届中部985研究生,七月份将入职某互联网大厂cv算法工程师。在去年灰飞烟灭的算法求职季中,经过几十场不同公司以及不同部门的面试中积累出了CV总复习系列,此为目标检测篇。
Faster-Rcnn网络
1.faster RCNN原理介绍,要详细画出图
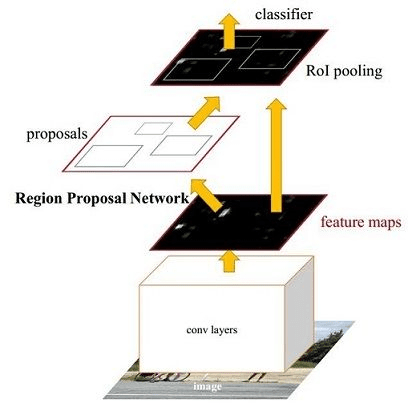
Faster R-CNN是一种两阶段(two-stage)方法,它提出的RPN网络取代了选择性搜索(Selective search)算法后使检测任务可以由神经网络端到端地完成。在结构上,Faster RCNN将特征抽取(feature extraction),候选区域提取(Region proposal提取),边框回归(bounding box regression),分类(classification)都整合在了一个网络中,使得综合性能有较大提高,在检测速度方面尤为明显。
2.RPN(Region Proposal Network)网络的作用、实现细节
RPN网络的作用: RPN专门用来提取候选框,一方面RPN耗时少,另一方面RPN可以很容易结合到Fast RCNN中,成为一个整体。
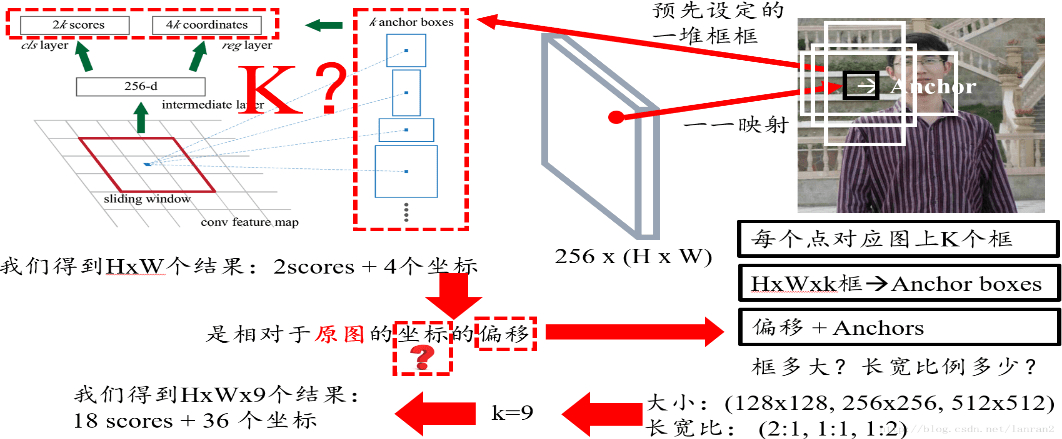
RPN网络的实现细节:一个特征图(Faster RCNN的公共Feature Map)经过sliding window处理,得到256维特征,对每个特征向量做两次全连接操作,一个得到2个分数,一个得到4个坐标{然后通过两次全连接得到结果2k个分数和4k个坐标[k指的是由锚点产生的K个框(K anchor boxes)]}
2个分数,因为RPN是提候选框,还不用判断类别,所以只要求区分是不是物体就行,那么就有两个分数,前景(物体)的分数,和背景的分数; 4个坐标是指针对原图坐标的偏移,首先一定要记住是原图;
预先设定好共有9种组合,所以k等于9,最后我们的结果是针对这9种组合的,所以有H x W x 9个结果,也就是18个分数和36个坐标。
写一下RPN的损失函数(多任务损失:二分类损失+SmoothL1损失)
训练RPN网络时,对于每个锚点我们定义了一个二分类标签(是该物体或不是)。
以下两种情况我们视锚点为了一个正样本标签时:
1.锚点和锚点们与标注之间的最高重叠矩形区域
2.或者锚点和标注的重叠区域指标(IOU)>0.7
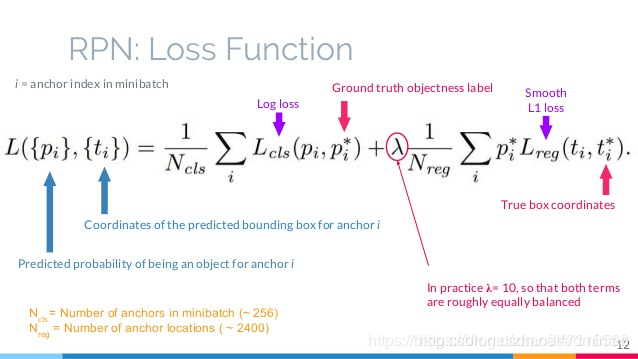
L ( p i , t i ) = 1 N c l s ∑ i L c l s ( p i , p i ∗ ) + λ 1 N r e g ∑ i p i ∗ L r e g ( t i , t i ∗ ) L\left(p_{i}, t_{i}\right)=\frac{1}{N_{c l s}} \sum_{i} L_{c l s}\left(p_{i}, p_{i}^{*}\right)+\lambda \frac{1}{N_{r e g}} \sum_{i} p_{i}^{*} L_{r e g}\left(t_{i}, t_{i}^{*}\right) L(pi,ti)=Ncls1i∑Lcls(pi,pi∗
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2696
2696

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









