




摘要:随着智能交通系统的快速发展,交通警察手势识别作为交通管理和自动化控制中的重要环节,得到了越来越多的关注。传统的手势识别方法常面临识别精度和实时性等方面的挑战。近年来,深度学习技术,尤其是卷积神经网络(CNN),因其在图像特征提取和模式识别中的优势,成为提升交通警察手势识别效果的理想工具。本研究基于卷积神经网络,提出了一种针对交通警察手势的自动化识别方法,旨在提高手势识别的准确性和实时性。
作者:Bob(原创)
项目概述
交通警察手势识别是智能交通系统中的重要组成部分,随着自动化交通管理需求的增加,传统的手势识别方法在精度和实时性上面临挑战。近年来,卷积神经网络(CNN)因其强大的特征提取能力和卓越的图像分类性能,在计算机视觉领域取得了显著成就。针对这一背景,本文提出了一种基于卷积神经网络的交通警察手势自动识别方法,旨在提高交通手势识别的准确性和系统的实时响应能力。
本文首先构建了一个包含八种交通警察手势的图像数据集,并对数据进行了预处理。具体包括图像尺寸归一化、灰度化处理及数据增强等操作。接着,采用了AlexNet架构的卷积神经网络进行模型构建和训练。为了提高模型的准确性,本文对网络的超参数进行了优化,并使用70%的数据作为训练集,剩余30%的数据作为测试集,确保训练过程的有效性和泛化能力。
实验结果表明,所提方法在测试集上的准确率达到了98%,并通过混淆矩阵等评估指标验证了模型在不同类别手势上的识别能力。与传统方法相比,基于CNN的交通警察手势识别模型具有更高的准确性和更强的鲁棒性,能够有效应用于智能交通管理系统中,为自动化交通控制提供了可行的技术支持。
系统设计
本系统基于卷积神经网络(CNN)设计,通过对交通警察手势图像进行自动化识别,实现了高效、精准的交通手势分类,为智能交通管理系统提供了支持。
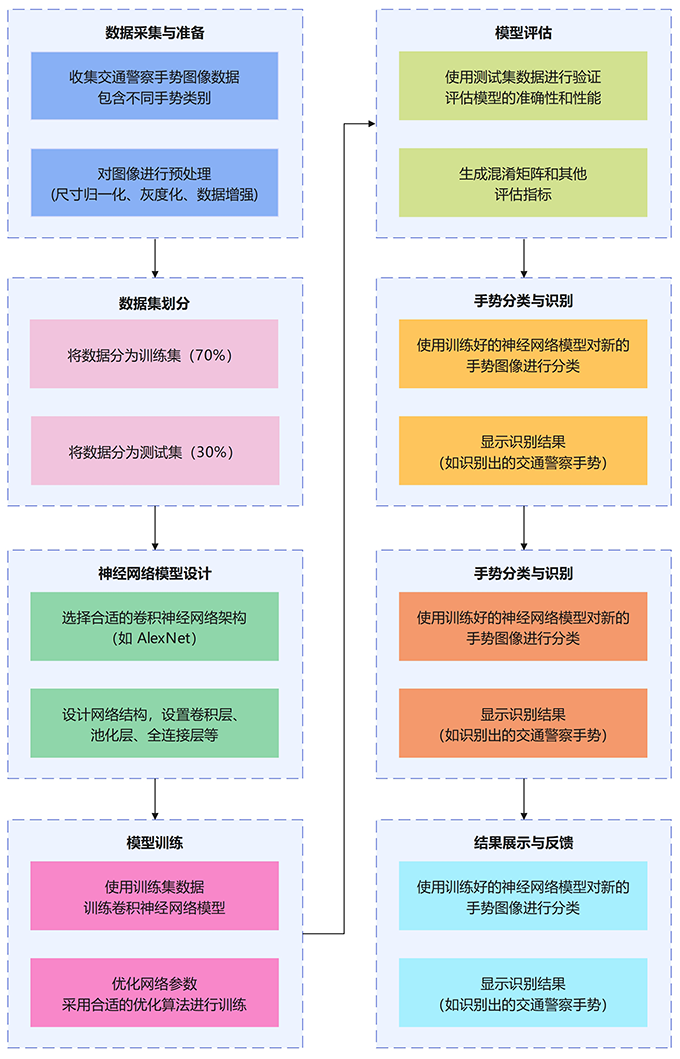
图1 系统整体流程图
硬件配置
该系统硬件配置如上,如果您的电脑配置低于下述规格,运行速度可能会与本系统的存在差异,请注意。
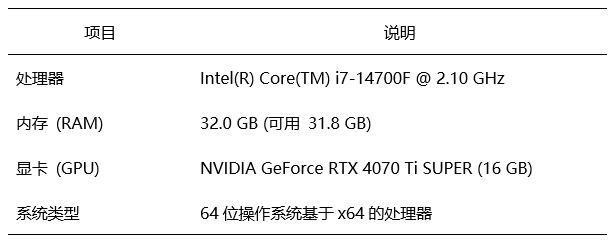
表1 惠普(HP)暗影精灵10台式整机配置(系统硬件配置)
软件环境
对本实验所需的各类软件及工具的基本信息进行了清晰汇总。

表2 系统软件配置(真实运行环境)
运行展示
GestureFig.m
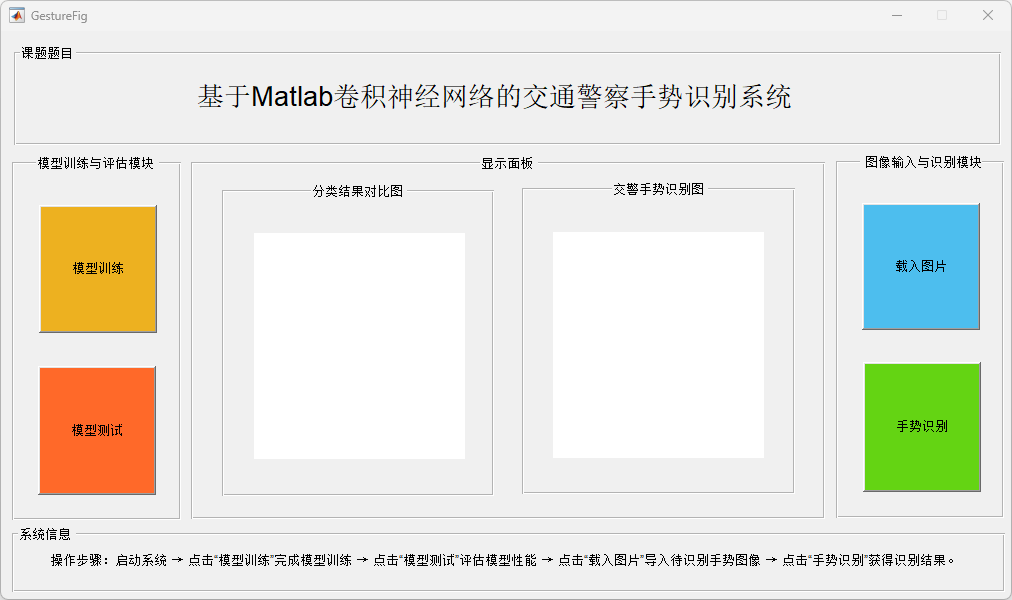
图2 交通警察手势识别系统主界面
该界面展示了系统的整体布局,包括模型训练与评估模块、图像输入与识别模块以及分类结果对比图和识别展示区。界面结构清晰、功能区分明确,能够支持用户完成模型训练、模型测试以及实时手势识别等操作,体现了系统的完整性与可操作性。
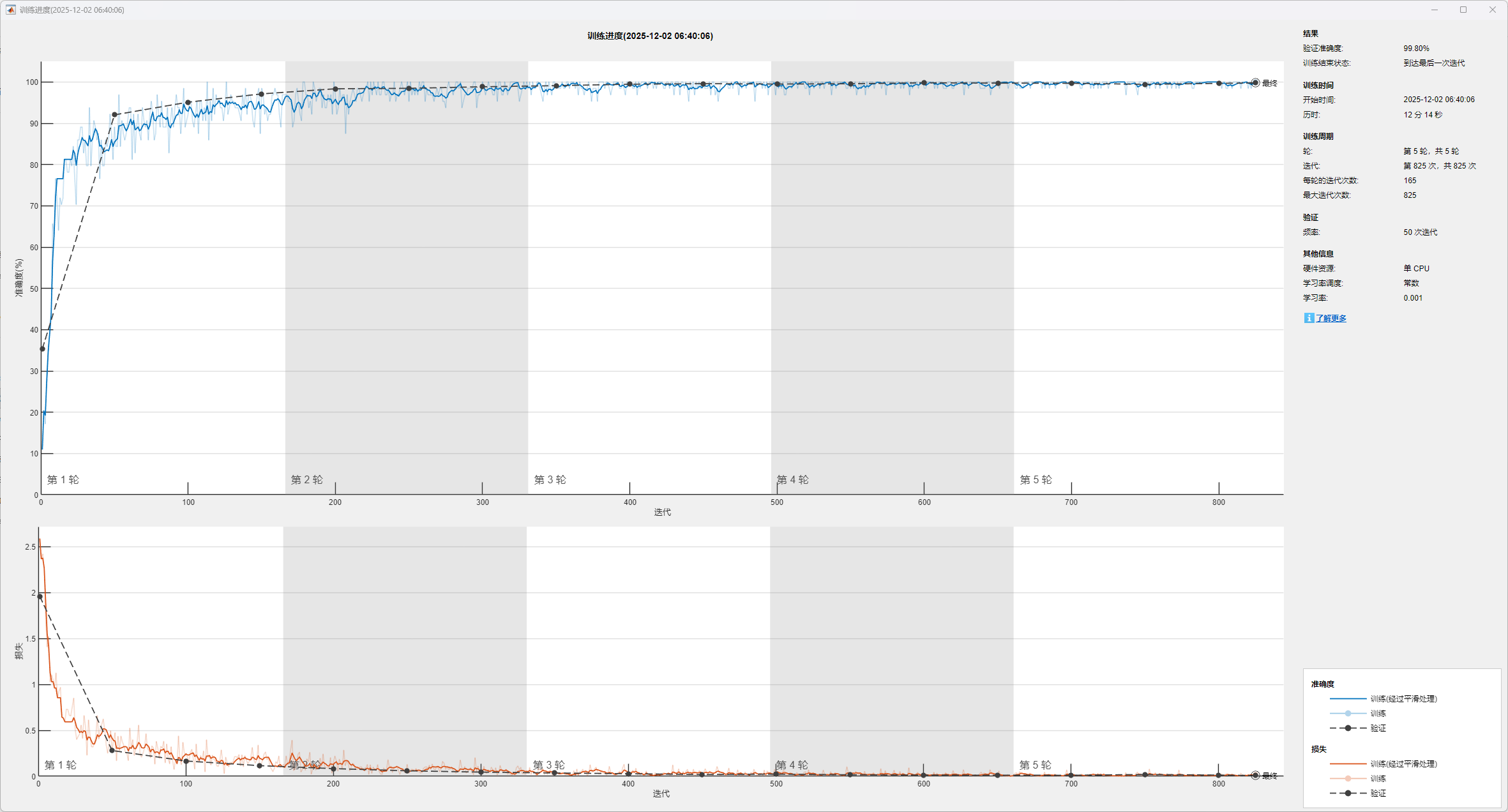
图3 交通警察手势识别CNN模型训练过程精度变化曲线
训练曲线显示模型精度快速提升并趋于稳定,损失持续下降,表明网络成功收敛且具备良好性能。
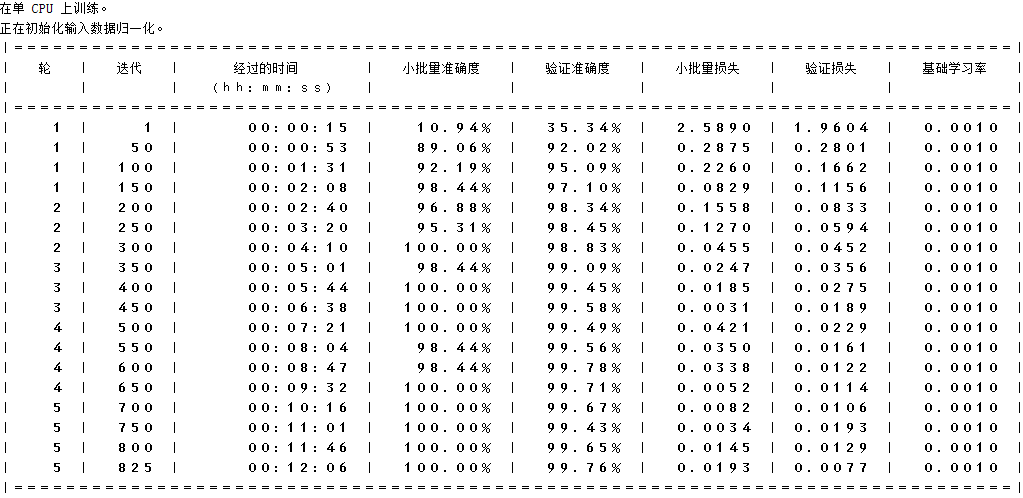
图4 交通警察手势识别CNN模型训练过程性能指标统计表
由表中最终一行可见,模型在完成 5 轮、共 825 次迭代后,验证精度约为 99.8%,训练时间约 12 分钟,证明该CNN模型在交通警察手势识别任务上具有高精度、稳定收敛和较好泛化能力,可满足系统应用需求。
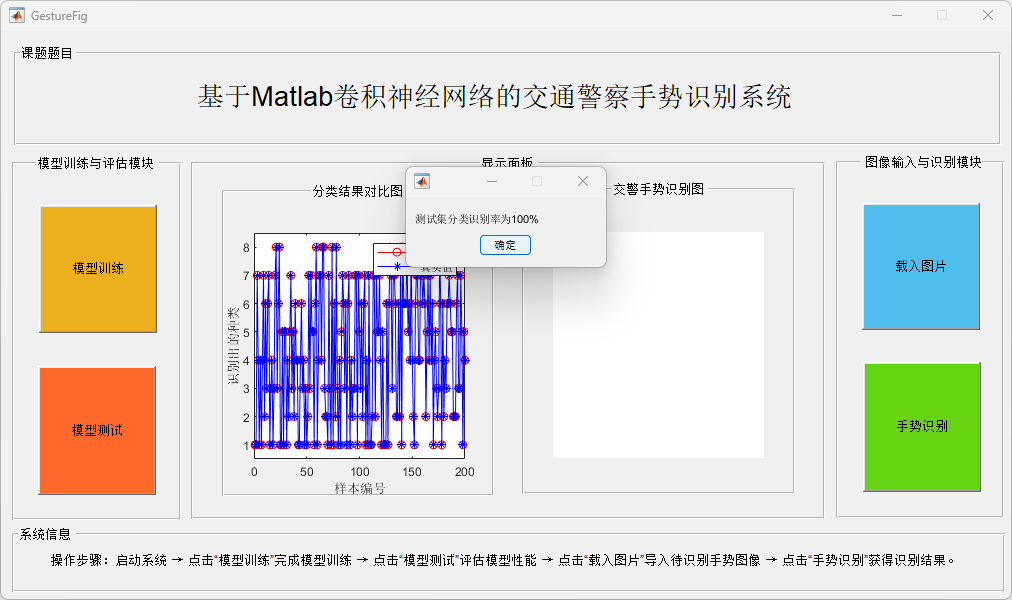
图5 系统模型测试界面与测试集分类结果
图中显示了模型在测试集上的分类结果对比图,蓝色曲线为预测值、红色曲线为真实值,二者高度吻合,测试准确率达到 100%。弹出窗口进一步展示模型测试的准确率,说明所训练的卷积神经网络具有良好的泛化能力。

图6 系统对“变道”手势的识别结果
系统成功将输入图像识别为“变道”手势,识别结果窗口弹出并给出明确提示。图像清晰、手势特征明显,模型能够准确识别其特征,说明系统能够对该类手势提供稳定的分类效果。

图7 系统对“减速慢行”手势的识别结果
输入图像中交通警察示意车辆减速慢行,系统成功识别并给出正确提示。表明模型对动态姿态变化具有良好的鲁棒性和识别能力。
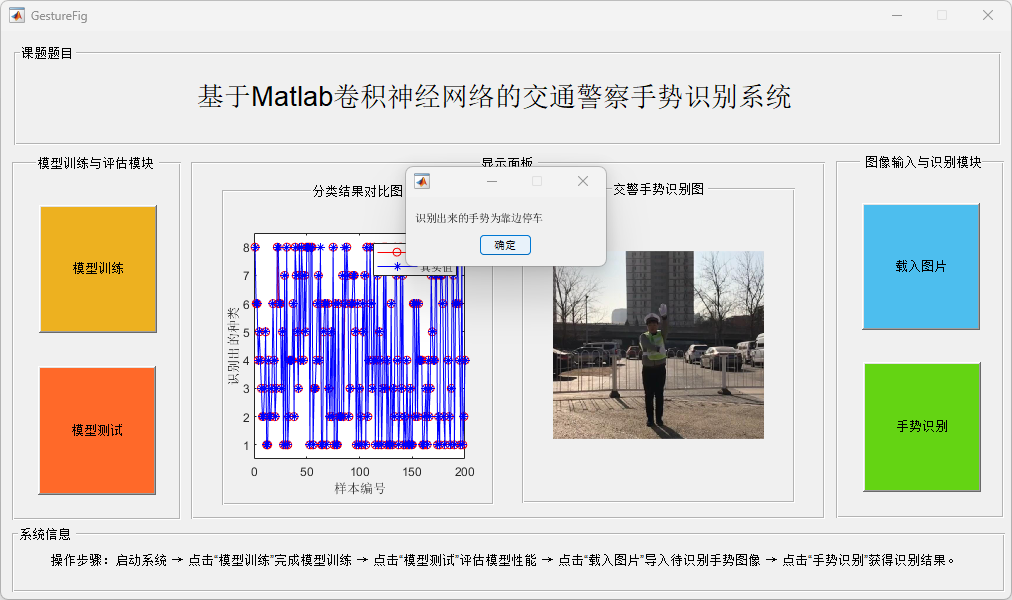
图8 系统对“靠边停车”手势的识别结果
系统准确识别出交通警察示意车辆靠边停车的手势。该结果说明模型能够有效区分与“停止”“直行”等手势在姿态上的细微差别。

图9 系统对“停止”手势的识别结果
输入图像的手势特征明显,系统输出为“停止”,与实际情况一致,说明模型对该类关键交通管制手势具有高度识别准确性。
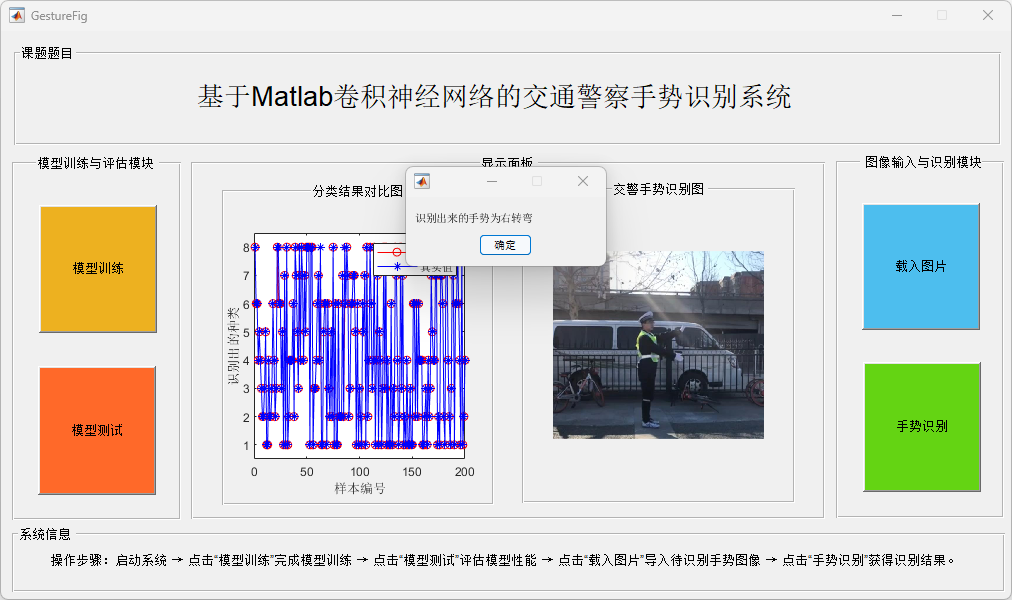
图10 系统对“右转弯”手势的识别结果
系统成功识别交通警察指挥右转弯的手势,说明模型对横向手臂姿态变化特征具有良好的识别效果。
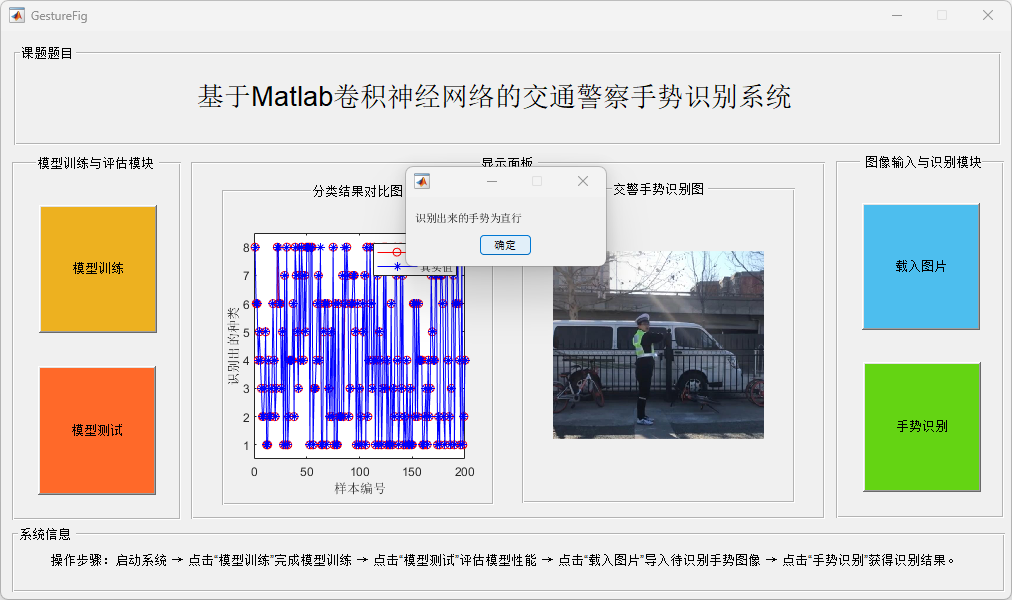
图11 系统对“直行”手势的识别结果
图中示例被系统正确分类为“直行”。该类手势与部分转弯手势较为相近,系统仍能准确区分,证明模型对空间姿态特征提取充分。
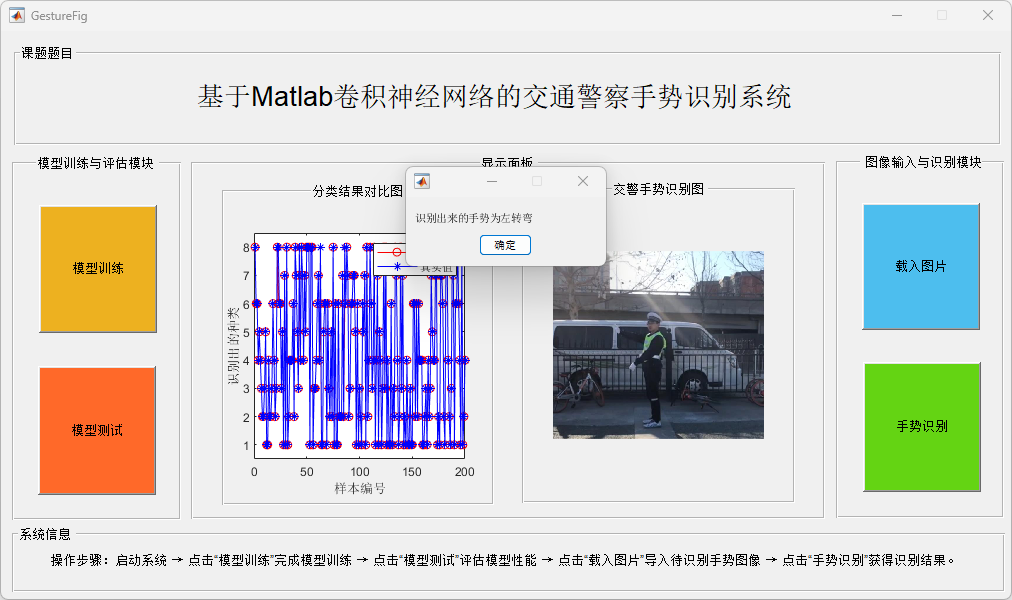
图12 系统对“左转弯”手势的识别结果
系统将输入图像正确识别为左转弯手势,对于左向手臂动作的识别表现稳定,证明模型能够从图像中提取左右方向性动作差异,识别准确度高。

















 6318
6318

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









