




 本文深入探讨了3D相机的工作原理,包括结构光和飞行时间法两种主要测量方式。介绍了Intel RealSense、Carnegie Robotics等品牌的双目相机,以及基于结构光和ToF技术的3D相机产品,为读者提供了全面的3D成像技术概览。
本文深入探讨了3D相机的工作原理,包括结构光和飞行时间法两种主要测量方式。介绍了Intel RealSense、Carnegie Robotics等品牌的双目相机,以及基于结构光和ToF技术的3D相机产品,为读者提供了全面的3D成像技术概览。
【sensor】镜头评价指标及测试方法(一)
【sensor】镜头评价指标及测试方法(二)—畸变与分辨率
【sensor】镜头评价指标及测试方法(三)--------测量原理及3D相机调查
【sensor】镜头评价指标及测试方法【四】————手机摄像头调查
【sensor】激光雷达dToF(五)
1.测量原理:
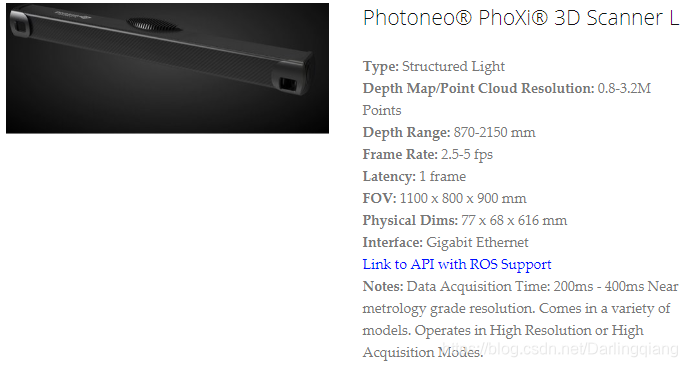
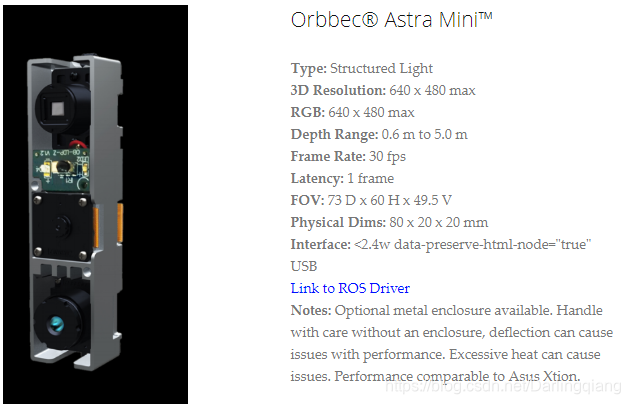
1.1、通过红外结构光(Structured Light)来测量像素距离,如Kinect1、Project Tango1、Intel Realsense等;
通过近红外激光器,将具有一定结构特征的光(比如离散光斑、条纹光、编码结构光等)投射到物体上,再由专门的红外摄像头进行采集。然后通过返回的结构光图案,计算物体与自身的距离。1.2、通过飞行时间法(TOF)原理来测量像素距离,如Kinect2、TOF传感器等。
通过发射脉冲光到被观测物体上,然后接收从物体反射回去的脉冲光,通过发送到返回的光束飞行(往返)时间来计算被测物体离相机的距离。分为光脉冲调制和连续波调制。

2. 3D相机调查
-
2.1双目相机:

Intel系列:https://store.intelrealsense.com/(D415,D435,D435i T265)



NERIAN sceneScan:SceneScan Stereo Vision Sensor – Allied Vision Technologies: Nerian


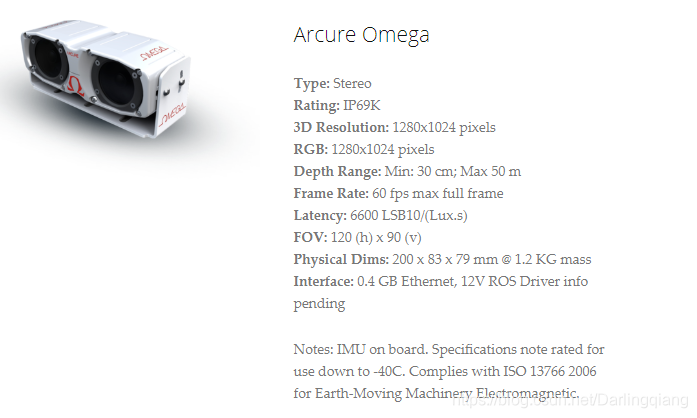
Blaxtair, spécialiste de l'intelligence artificielle et de la vision embarquée dans l'industrie
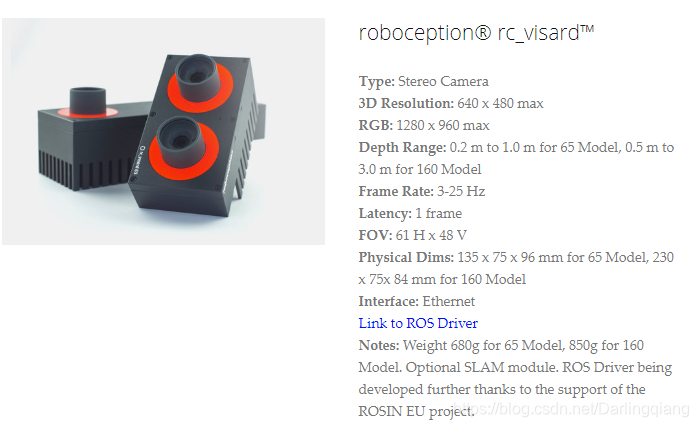
Roboception rc_visard 3D传感器,更细致独特 - 普象网
-
2.2结构光


-
2.3 ToF
-

官网第二代产品:ASUS 华硕官网 - 追寻无与伦比
kinect使用介绍:
https://wenku.baidu.com/view/cd21be3149d7c1c708a1284ac850ad02de8007cd.html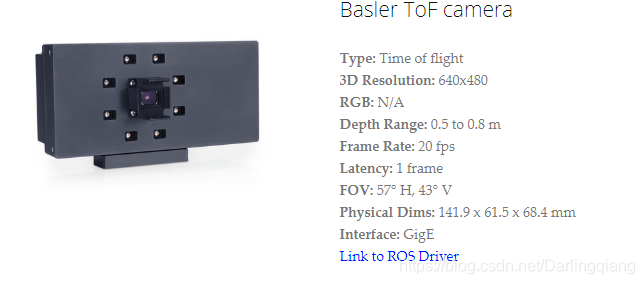 https://www.baslerweb.com/en/products/cameras/3d-cameras/
https://www.baslerweb.com/en/products/cameras/3d-cameras/

参考网址:
【1】3D Camera Survey — ROS-Industrial
【2】3D Camera Survey — ROS-Industrial



















 8215
8215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











