




LLT-based SRF与EKF等效性的完整推导过程(从EKF后验协方差公式出发)
一、推导前置准备
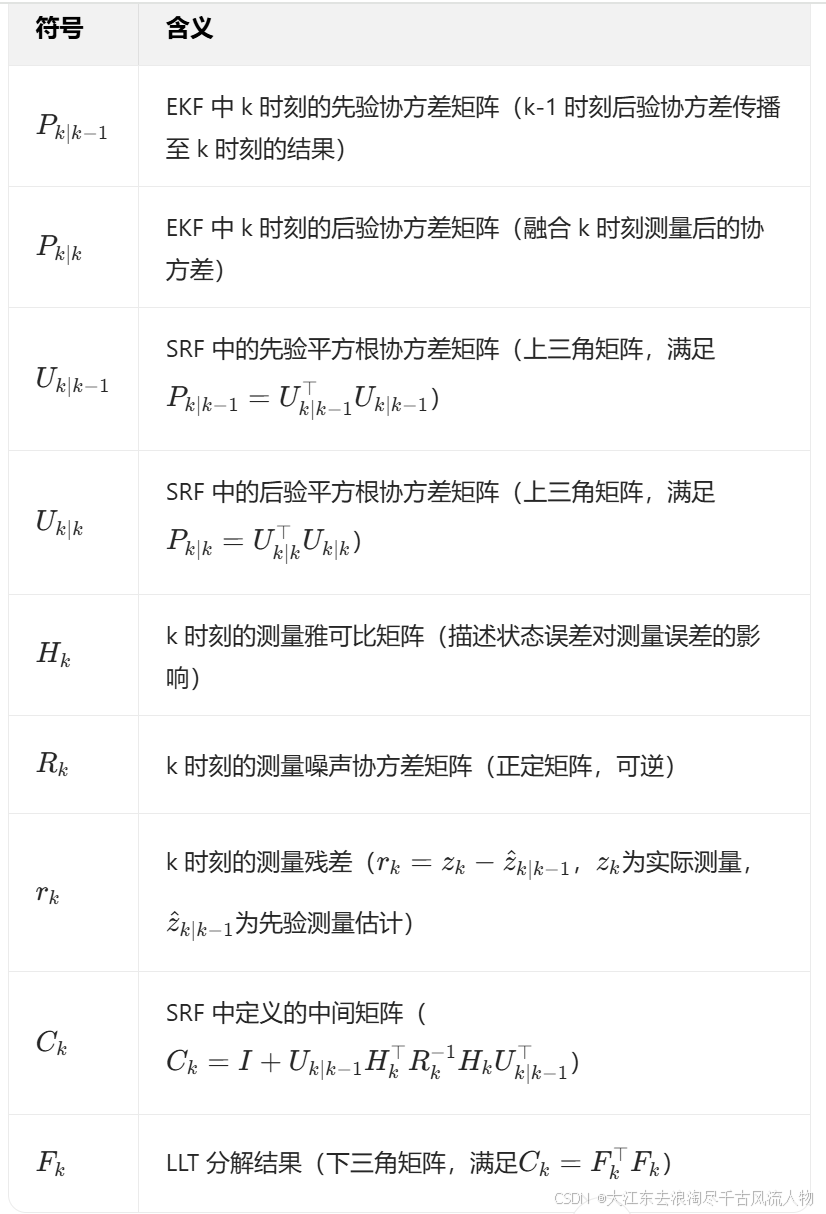
在正式推导前,需明确核心符号定义和关键矩阵性质,确保推导逻辑连贯:
关键矩阵性质:
- 上三角矩阵的转置是下三角矩阵,下三角矩阵的逆仍是下三角矩阵;
- 矩阵逆的性质:( (AB)−1=B−1A−1(AB)^{-1} = B^{-1} A^{-1}(AB)−1=B−1A−1 )(A、B均可逆);
- Woodbury恒等式(核心恒等变换工具):对可逆矩阵( A )、( B )及任意矩阵( C ),满足
( (A+CBC⊤)−1=A−1−A−1C(B−1+C⊤A−1C)−1C⊤A−1(A + C B C^\top)^{-1} = A^{-1} - A^{-1} C (B^{-1} + C^\top A^{-1} C)^{-1} C^\top A^{-1}(A+CBC⊤)−1=A−1−A−1C(B−1+C⊤A−1C)−1C⊤A−1 ); - 正定矩阵的Cholesky分解唯一:若( M )是正定矩阵,则存在唯一下三角矩阵( L ),使得( M=LL⊤M = L L^\topM=LL⊤ )(本文中记为LLT分解)。
二、第一部分:后验协方差更新等效性(证明( Pk∣k=Uk∣k⊤Uk∣kP_{k|k} = U_{k|k}^\top U_{k|k}Pk∣k=Uk∣k⊤Uk∣k )
步骤1:写出EKF的后验协方差公式(推导起点)
EKF的核心是通过“先验协方差+测量修正”得到后验协方差,其标准公式为:
Pk∣k=Pk∣k−1−Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1⏟卡尔曼增益中的逆项HkPk∣k−1(1)
P_{k|k} = P_{k|k-1} - P_{k|k-1} H_k^\top \underbrace{(H_k P_{k|k-1} H_k^\top + R_k)^{-1}}_{卡尔曼增益中的逆项} H_k P_{k|k-1} \tag{1}
Pk∣k=Pk∣k−1−Pk∣k−1Hk⊤卡尔曼增益中的逆项(HkPk∣k−1Hk⊤+Rk)−1HkPk∣k−1(1)
公式含义:
- 右侧第一项( Pk∣k−1P_{k|k-1}Pk∣k−1 )是“未融合测量的先验协方差”;
- 第二项是“测量带来的协方差修正项”(通过卡尔曼增益的核心逆项调整,体现测量对状态不确定性的压缩)。
步骤2:代入SRF的核心定义( Pk∣k−1=Uk∣k−1⊤Uk∣k−1P_{k|k-1} = U_{k|k-1}^\top U_{k|k-1}Pk∣k−1=Uk∣k−1⊤Uk∣k−1 )
SRF的本质是用“平方根协方差矩阵( U )”替代“传统协方差矩阵( P )”,因此将公式(1)中所有( Pk∣k−1P_{k|k-1}Pk∣k−1 )替换为( Uk∣k−1⊤Uk∣k−1U_{k|k-1}^\top U_{k|k-1}Uk∣k−1⊤Uk∣k−1 )(利用( P=U⊤UP = U^\top UP=U⊤U )):
Pk∣k=Uk∣k−1⊤Uk∣k−1−Uk∣k−1⊤Uk∣k−1Hk⊤(HkUk∣k−1⊤Uk∣k−1Hk⊤+Rk)−1HkUk∣k−1⊤Uk∣k−1(2)
P_{k|k} = U_{k|k-1}^\top U_{k|k-1} - U_{k|k-1}^\top U_{k|k-1} H_k^\top (H_k U_{k|k-1}^\top U_{k|k-1} H_k^\top + R_k)^{-1} H_k U_{k|k-1}^\top U_{k|k-1} \tag{2}
Pk∣k=Uk∣k−1⊤Uk∣k−1−Uk∣k−1⊤Uk∣k−1Hk⊤(HkUk∣k−1⊤Uk∣k−1Hk⊤+Rk)−1HkUk∣k−1⊤Uk∣k−1(2)
替换依据:矩阵乘法满足结合律,即( Pk∣k−1Hk⊤=(Uk∣k−1⊤Uk∣k−1)Hk⊤=Uk∣k−1⊤(Uk∣k−1Hk⊤)P_{k|k-1} H_k^\top = (U_{k|k-1}^\top U_{k|k-1}) H_k^\top = U_{k|k-1}^\top (U_{k|k-1} H_k^\top)Pk∣k−1Hk⊤=(Uk∣k−1⊤Uk∣k−1)Hk⊤=Uk∣k−1⊤(Uk∣k−1Hk⊤) )。
将( Uk∣k−1⊤U_{k|k-1}^\topUk∣k−1⊤ )和( Uk∣k−1U_{k|k-1}Uk∣k−1 )分别提取到括号外(利用矩阵乘法分配律),公式(2)可整理为:
Pk∣k=Uk∣k−1⊤[I−Uk∣k−1Hk⊤(HkUk∣k−1⊤Uk∣k−1Hk⊤+Rk)−1HkUk∣k−1⊤]Uk∣k−1(3)
P_{k|k} = U_{k|k-1}^\top \left[ I - U_{k|k-1} H_k^\top (H_k U_{k|k-1}^\top U_{k|k-1} H_k^\top + R_k)^{-1} H_k U_{k|k-1}^\top \right] U_{k|k-1} \tag{3}
Pk∣k=Uk∣k−1⊤[I−Uk∣k−1Hk⊤(HkUk∣k−1⊤Uk∣k−1Hk⊤+Rk)−1HkUk∣k−1⊤]Uk∣k−1(3)
整理目的:凸显括号内的“单位矩阵修正项”,为后续利用Woodbury恒等式化简做准备。
步骤3:用Woodbury恒等式化简括号内的核心项
公式(3)中括号内的项是推导的关键,记为( M=I−Uk∣k−1Hk⊤(HkUk∣k−1⊤Uk∣k−1Hk⊤+Rk)−1HkUk∣k−1⊤M = I - U_{k|k-1} H_k^\top (H_k U_{k|k-1}^\top U_{k|k-1} H_k^\top + R_k)^{-1} H_k U_{k|k-1}^\topM=I−Uk∣k−1Hk⊤(HkUk∣k−1⊤Uk∣k−1Hk⊤+Rk)−1HkUk∣k−1⊤ ),需通过Woodbury恒等式化简。
步骤3.1:定义中间变量简化表达式
令:
- ( A=Uk∣k−1Hk⊤A = U_{k|k-1} H_k^\topA=Uk∣k−1Hk⊤)(因( Uk∣k−1U_{k|k-1}Uk∣k−1 )是上三角、( Hk⊤H_k^\topHk⊤)是任意矩阵,( A )为普通矩阵);
- ( B = R_k )(测量噪声协方差,正定可逆)。
则( HkUk∣k−1⊤Uk∣k−1Hk⊤=A⊤AH_k U_{k|k-1}^\top U_{k|k-1} H_k^\top = A^\top AHkUk∣k−1⊤Uk∣k−1Hk⊤=A⊤A ),括号内的项可改写为:
M=I−A(A⊤A+B)−1A⊤(4)
M = I - A (A^\top A + B)^{-1} A^\top \tag{4}
M=I−A(A⊤A+B)−1A⊤(4)
步骤3.2:应用Woodbury恒等式化简( (A⊤A+B)−1(A^\top A + B)^{-1}(A⊤A+B)−1 )
对(A⊤A+B)−1(A^\top A + B)^{-1}(A⊤A+B)−1应用Woodbury恒等式(令Woodbury恒等式中的A→A⊤A \to A^\topA→A⊤、B→BB \to BB→B、C→IC \to IC→I :
(A⊤A+B)−1=B−1−B−1A⊤(I+AB−1A⊤)−1AB−1(5)
(A^\top A + B)^{-1} = B^{-1} - B^{-1} A^\top (I + A B^{-1} A^\top)^{-1} A B^{-1} \tag{5}
(A⊤A+B)−1=B−1−B−1A⊤(I+AB−1A⊤)−1AB−1(5)
步骤3.3:将(5)代入(4),化简得到M=(I+AB−1A⊤)−1M = (I + A B^{-1} A^\top)^{-1}M=(I+AB−1A⊤)−1
将(5)代入(4):
M=I−A[B−1−B−1A⊤(I+AB−1A⊤)−1AB−1]A⊤=I−AB−1A⊤+AB−1A⊤(I+AB−1A⊤)−1AB−1A⊤
\begin{align*}
M &= I - A \left[ B^{-1} - B^{-1} A^\top (I + A B^{-1} A^\top)^{-1} A B^{-1} \right] A^\top \\
&= I - A B^{-1} A^\top + A B^{-1} A^\top (I + A B^{-1} A^\top)^{-1} A B^{-1} A^\top \tag{6}
\end{align*}
M=I−A[B−1−B−1A⊤(I+AB−1A⊤)−1AB−1]A⊤=I−AB−1A⊤+AB−1A⊤(I+AB−1A⊤)−1AB−1A⊤(6)
令C=I+AB−1A⊤C = I + A B^{-1} A^\topC=I+AB−1A⊤(即论文中定义的CkC_kCk),则AB−1A⊤=C−IA B^{-1} A^\top = C - IAB−1A⊤=C−I,代入(6):
M=I−(C−I)+(C−I)C−1(C−I)=I−C+I+(C−I)(I−C−1)=2I−C+(C⋅I−C⋅C−1−I⋅I+I⋅C−1)=2I−C+(C−I−I+C−1)=C−1
\begin{align*}
M &= I - (C - I) + (C - I) C^{-1} (C - I) \\
&= I - C + I + (C - I)(I - C^{-1}) \\
&= 2I - C + (C \cdot I - C \cdot C^{-1} - I \cdot I + I \cdot C^{-1}) \\
&= 2I - C + (C - I - I + C^{-1}) \\
&= C^{-1}
\end{align*}
M=I−(C−I)+(C−I)C−1(C−I)=I−C+I+(C−I)(I−C−1)=2I−C+(C⋅I−C⋅C−1−I⋅I+I⋅C−1)=2I−C+(C−I−I+C−1)=C−1
最终得到关键化简结果:
M=(I+AB−1A⊤)−1=(I+Uk∣k−1Hk⊤Rk−1HkUk∣k−1⊤)⏟Ck−1(7)
M = (I + A B^{-1} A^\top)^{-1} = \underbrace{(I + U_{k|k-1} H_k^\top R_k^{-1} H_k U_{k|k-1}^\top)}_{C_k} ^{-1} \tag{7}
M=(I+AB−1A⊤)−1=−1(I+Uk∣k−1Hk⊤Rk−1HkUk∣k−1⊤)(7)
步骤4:引入LLT分解,定义SRF的后验平方根协方差( U_{k|k} )
步骤4.1:对( C_k )进行LLT分解
由论文定义,( Ck=I+Uk∣k−1Hk⊤Rk−1HkUk∣k−1⊤C_k = I + U_{k|k-1} H_k^\top R_k^{-1} H_k U_{k|k-1}^\topCk=I+Uk∣k−1Hk⊤Rk−1HkUk∣k−1⊤ ):
- 因( R_k )正定,( Rk−1R_k^{-1}Rk−1 )正定;
- ( Uk∣k−1Hk⊤Rk−1HkUk∣k−1⊤U_{k|k-1} H_k^\top R_k^{-1} H_k U_{k|k-1}^\topUk∣k−1Hk⊤Rk−1HkUk∣k−1⊤ )是“矩阵二次型”,为半正定矩阵;
- 半正定矩阵加单位矩阵(正定)后,( C_k )是严格正定矩阵,满足Cholesky分解条件。
对( C_k )进行LLT分解(下三角Cholesky分解),得到唯一的下三角矩阵( F_k ),满足:
Ck=Fk⊤Fk(8)
C_k = F_k^\top F_k \tag{8}
Ck=Fk⊤Fk(8)
步骤4.2:推导( U_{k|k} )的表达式
将(7)和(8)代入公式(3),EKF的后验协方差可改写为:
Pk∣k=Uk∣k−1⊤Ck−1Uk∣k−1=Uk∣k−1⊤(Fk⊤Fk)−1Uk∣k−1(9)
P_{k|k} = U_{k|k-1}^\top C_k^{-1} U_{k|k-1} = U_{k|k-1}^\top (F_k^\top F_k)^{-1} U_{k|k-1} \tag{9}
Pk∣k=Uk∣k−1⊤Ck−1Uk∣k−1=Uk∣k−1⊤(Fk⊤Fk)−1Uk∣k−1(9)
利用矩阵逆的性质( (Fk⊤Fk)−1=Fk−1Fk−⊤(F_k^\top F_k)^{-1} = F_k^{-1} F_k^{-\top}(Fk⊤Fk)−1=Fk−1Fk−⊤ )(( FkF_kFk )是下三角矩阵,( Fk−1F_k^{-1}Fk−1)仍是下三角,( Fk−⊤F_k^{-\top}Fk−⊤ )是上三角),代入(9):
Pk∣k=Uk∣k−1⊤Fk−1Fk−⊤Uk∣k−1(10)
P_{k|k} = U_{k|k-1}^\top F_k^{-1} F_k^{-\top} U_{k|k-1} \tag{10}
Pk∣k=Uk∣k−1⊤Fk−1Fk−⊤Uk∣k−1(10)
根据SRF的核心定义(( Pk∣k=Uk∣k⊤Uk∣kP_{k|k} = U_{k|k}^\top U_{k|k}Pk∣k=Uk∣k⊤Uk∣k )),对比(10)两侧的矩阵结构:
- 左侧( Pk∣k=Uk∣k⊤Uk∣kP_{k|k} = U_{k|k}^\top U_{k|k}Pk∣k=Uk∣k⊤Uk∣k )(( Uk∣kU_{k|k}Uk∣k )是上三角矩阵);
- 右侧( Uk∣k−1⊤Fk−1Fk−⊤Uk∣k−1=(Fk−⊤Uk∣k−1)⊤(Fk−⊤Uk∣k−1)U_{k|k-1}^\top F_k^{-1} F_k^{-\top} U_{k|k-1} = (F_k^{-\top} U_{k|k-1})^\top (F_k^{-\top} U_{k|k-1})Uk∣k−1⊤Fk−1Fk−⊤Uk∣k−1=(Fk−⊤Uk∣k−1)⊤(Fk−⊤Uk∣k−1) )(因( (AB)⊤=B⊤A⊤(AB)^\top = B^\top A^\top(AB)⊤=B⊤A⊤ ),且( Fk−⊤F_k^{-\top}Fk−⊤ )是上三角、( U_{k|k-1} )是上三角,两者乘积仍是上三角)。
因此,可定义SRF的后验平方根协方差矩阵:
Uk∣k=Fk−⊤Uk∣k−1(11)
U_{k|k} = F_k^{-\top} U_{k|k-1} \tag{11}
Uk∣k=Fk−⊤Uk∣k−1(11)
将(11)代入(10),最终得到:
Pk∣k=Uk∣k⊤Uk∣k(12)
P_{k|k} = U_{k|k}^\top U_{k|k} \tag{12}
Pk∣k=Uk∣k⊤Uk∣k(12)
结论1:EKF的后验协方差( P_{k|k} )与LLT-based SRF的后验协方差($( U_{k|k}^\top U_{k|k}$ ))完全等效。
三、第二部分:状态更新量等效性(证明( Kkrk=Uk∣k⊤Uk∣kHk⊤Rk−1rkK_k r_k = U_{k|k}^\top U_{k|k} H_k^\top R_k^{-1} r_kKkrk=Uk∣k⊤Uk∣kHk⊤Rk−1rk ))
EKF的状态更新公式为( x^k∣k=x^k∣k−1+Kkrk\hat{x}_{k|k} = \hat{x}_{k|k-1} + K_k r_kx^k∣k=x^k∣k−1+Kkrk ),其中( Kk=Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1K_k = P_{k|k-1} H_k^\top (H_k P_{k|k-1} H_k^\top + R_k)^{-1}Kk=Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1 )是卡尔曼增益。需证明( Kkrk=Uk∣k⊤Uk∣kHk⊤Rk−1rkK_k r_k = U_{k|k}^\top U_{k|k} H_k^\top R_k^{-1} r_kKkrk=Uk∣k⊤Uk∣kHk⊤Rk−1rk )。
步骤1:写出EKF的卡尔曼增益与状态更新项
EKF的状态更新修正项为:
Kkrk=Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1rk(13)
K_k r_k = P_{k|k-1} H_k^\top (H_k P_{k|k-1} H_k^\top + R_k)^{-1} r_k \tag{13}
Kkrk=Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1rk(13)
步骤2:技巧性拆分( rk=RkRk−1rkr_k = R_k R_k^{-1} r_krk=RkRk−1rk )
为关联第一部分的协方差结果,将( r_k )拆分为“( Rk×Rk−1rkR_k \times R_k^{-1} r_kRk×Rk−1rk )”(因( R_k )可逆,拆分不改变原表达式):
Kkrk=Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1RkRk−1rk(14)
K_k r_k = P_{k|k-1} H_k^\top (H_k P_{k|k-1} H_k^\top + R_k)^{-1} R_k R_k^{-1} r_k \tag{14}
Kkrk=Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1RkRk−1rk(14)
步骤3:化简( (HkPk∣k−1Hk⊤+Rk)−1Rk(H_k P_{k|k-1} H_k^\top + R_k)^{-1} R_k(HkPk∣k−1Hk⊤+Rk)−1Rk )
利用矩阵逆的恒等式:对任意可逆矩阵( X )、( Y ),满足( (X+Y)−1Y=I−(X+Y)−1X(X + Y)^{-1} Y = I - (X + Y)^{-1} X(X+Y)−1Y=I−(X+Y)−1X )。令( X=HkPk∣k−1Hk⊤X = H_k P_{k|k-1} H_k^\topX=HkPk∣k−1Hk⊤ )、( Y=RkY = R_kY=Rk),则:
(HkPk∣k−1Hk⊤+Rk)−1Rk=I−(HkPk∣k−1Hk⊤+Rk)−1HkPk∣k−1Hk⊤(15)
(H_k P_{k|k-1} H_k^\top + R_k)^{-1} R_k = I - (H_k P_{k|k-1} H_k^\top + R_k)^{-1} H_k P_{k|k-1} H_k^\top \tag{15}
(HkPk∣k−1Hk⊤+Rk)−1Rk=I−(HkPk∣k−1Hk⊤+Rk)−1HkPk∣k−1Hk⊤(15)
将(15)代入(14):
Kkrk=Pk∣k−1Hk⊤[I−(HkPk∣k−1Hk⊤+Rk)−1HkPk∣k−1Hk⊤]Rk−1rk=[Pk∣k−1Hk⊤−Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1HkPk∣k−1Hk⊤]Rk−1rk\begin{align*}
K_k r_k &= P_{k|k-1} H_k^\top \left[ I - (H_k P_{k|k-1} H_k^\top + R_k)^{-1} H_k P_{k|k-1} H_k^\top \right] R_k^{-1} r_k \\
&= \left[ P_{k|k-1} H_k^\top - P_{k|k-1} H_k^\top (H_k P_{k|k-1} H_k^\top + R_k)^{-1} H_k P_{k|k-1} H_k^\top \right] R_k^{-1} r_k \tag{16}
\end{align*}
Kkrk=Pk∣k−1Hk⊤[I−(HkPk∣k−1Hk⊤+Rk)−1HkPk∣k−1Hk⊤]Rk−1rk=[Pk∣k−1Hk⊤−Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1HkPk∣k−1Hk⊤]Rk−1rk(16)
步骤4:提取公因子( Hk⊤H_k^\topHk⊤ ),关联后验协方差( Pk∣kP_{k|k}Pk∣k )
观察(16)括号内的项,两项均包含( H_k^\top ),利用矩阵乘法结合律提取公因子( H_k^\top )到括号外:
Kkrk=[Pk∣k−1−Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1HkPk∣k−1]⏟Pk∣k(EKF后验协方差,第一部分公式(1))Hk⊤Rk−1rk(17)
K_k r_k = \underbrace{\left[ P_{k|k-1} - P_{k|k-1} H_k^\top (H_k P_{k|k-1} H_k^\top + R_k)^{-1} H_k P_{k|k-1} \right]}_{P_{k|k} \text{(EKF后验协方差,第一部分公式(1))}} H_k^\top R_k^{-1} r_k \tag{17}
Kkrk=Pk∣k(EKF后验协方差,第一部分公式(1))[Pk∣k−1−Pk∣k−1Hk⊤(HkPk∣k−1Hk⊤+Rk)−1HkPk∣k−1]Hk⊤Rk−1rk(17)
步骤5:代入( Pk∣k=Uk∣k⊤Uk∣kP_{k|k} = U_{k|k}^\top U_{k|k}Pk∣k=Uk∣k⊤Uk∣k )(第一部分结论)
将第一部分得到的( Pk∣k=Uk∣k⊤Uk∣kP_{k|k} = U_{k|k}^\top U_{k|k}Pk∣k=Uk∣k⊤Uk∣k )代入(17):
[Kkrk=Uk∣k⊤Uk∣kHk⊤Rk−1rk(18)
K_k r_k = U_{k|k}^\top U_{k|k} H_k^\top R_k^{-1} r_k \tag{18}
Kkrk=Uk∣k⊤Uk∣kHk⊤Rk−1rk(18)]
结论2:EKF的状态更新修正项( KkrkK_k r_kKkrk )与LLT-based SRF的状态更新修正项(( Uk∣k⊤Uk∣kHk⊤Rk−1rkU_{k|k}^\top U_{k|k} H_k^\top R_k^{-1} r_kUk∣k⊤Uk∣kHk⊤Rk−1rk ))完全等效。
四、完整等效性证明总结
通过上述两部分推导,可得出最终结论:
LLT-based SRF的更新规则与经典EKF完全等效——即:
- 后验协方差等效:( Pk∣k=Uk∣k⊤Uk∣kP_{k|k} = U_{k|k}^\top U_{k|k}Pk∣k=Uk∣k⊤Uk∣k )(由公式(12)证明);
- 状态更新等效:( Kkrk=Uk∣k⊤Uk∣kHk⊤Rk−1rkK_k r_k = U_{k|k}^\top U_{k|k} H_k^\top R_k^{-1} r_kKkrk=Uk∣k⊤Uk∣kHk⊤Rk−1rk )(由公式(18)证明)。
该等效性证明的核心价值在于:
- 正确性保障:LLT-SRF继承了EKF的数学严谨性,不会因引入“平方根协方差”和“LLT分解”产生额外误差;
- 优势凸显:相比EKF,LLT-SRF通过“上三角矩阵( U )”和“LLT分解”,避免了( P )矩阵非正定的数值风险,同时减少了存储量(( U )是上三角,存储量为( P )的1/2)和计算量(LLT分解计算量为( O(n^3/3) ),远低于矩阵求逆的( O(n^3) )),完美适配VINS的嵌入式实时需求。



















 2118
2118

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











