ORB-SLAM2 论文翻译




于 2022-05-01 01:42:38 首次发布

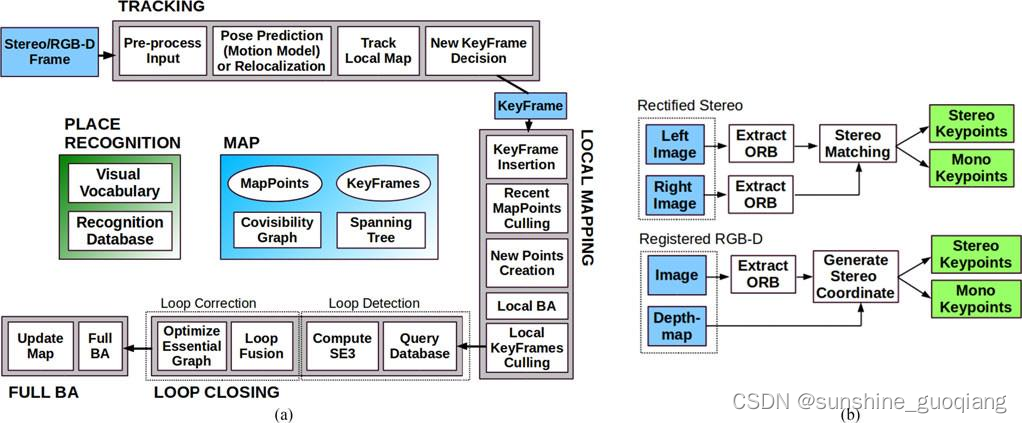
 ORB-SLAM2是一个全面且强大的开源SLAM(Simultaneous Localization And Mapping)系统,支持单目、立体和RGB-D相机。该系统集成了特征检测与匹配、视觉惯性导航、闭环检测和重定位等功能,为机器人导航和增强现实等领域提供了稳定可靠的解决方案。
ORB-SLAM2是一个全面且强大的开源SLAM(Simultaneous Localization And Mapping)系统,支持单目、立体和RGB-D相机。该系统集成了特征检测与匹配、视觉惯性导航、闭环检测和重定位等功能,为机器人导航和增强现实等领域提供了稳定可靠的解决方案。
ORB-SLAM2是一个全面且强大的开源SLAM(Simultaneous Localization And Mapping)系统,支持单目、立体和RGB-D相机。该系统集成了特征检测与匹配、视觉惯性导航、闭环检测和重定位等功能,为机器人导航和增强现实等领域提供了稳定可靠的解决方案。
ORB-SLAM2是一个全面且强大的开源SLAM(Simultaneous Localization And Mapping)系统,支持单目、立体和RGB-D相机。该系统集成了特征检测与匹配、视觉惯性导航、闭环检测和重定位等功能,为机器人导航和增强现实等领域提供了稳定可靠的解决方案。
 2844
2844

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言