




HDFS写数据流程
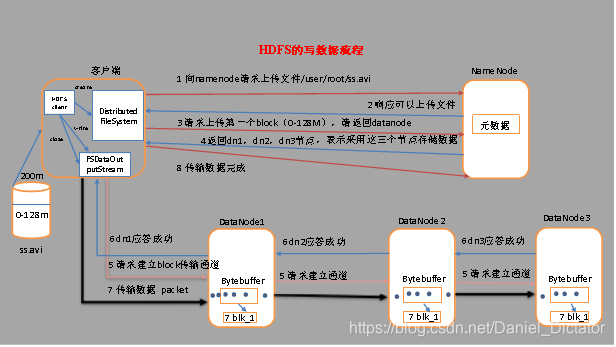
1)客户端通过DIstribute FileSystem模块向NameNOde请求上传文件,NameNode检查目标文件是否已经上传,父目录是否存在。
2)NameNode返回是否可以上传。
3)客户端请求第一个Block上传到哪几个datanode服务器上。
4)NameNode返回3个datanode节点,分别为dn1,dn2,dn3.
5)客户端通过FSDataOutoutStream模块请求dn1上传数据,dn1收到请求会继续调用dn2,然后dn2调用dn3,将这个通信管道建立完成。
6)dn1,dn2,dn3逐级应答客户端。
7)客户端开始往dn1上传第一个block(先从磁盘读取数据放到一个本地内存缓存),以packet为单位,dn1收到一个packet就会传给dn2,dn2传给dn3.
8)当一个block传输完成之后,客户端再次请求NameNode上传第二个block的服务器。(重复执行3-7步)。
HDFS的读数据流程
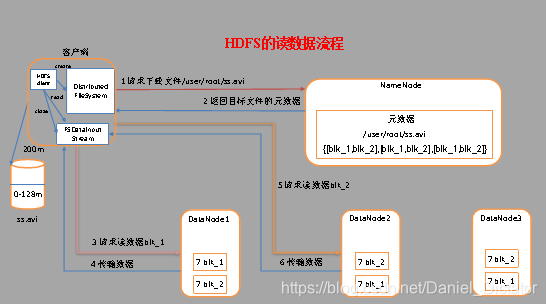
1)客户端通过Distributed FileSystem向NameNOde请求下载文件,NameNode通过查询元数据,找到文件块所在的DataNode地址。
2)挑选一台DataNode(就近原则,然后随机)服务器,请求读取数据。
3)DataNode开始传输数据给客户端(从磁盘里面读取数据输入流,以packet为单位来做校验)。
4)客户端以packet为单位接收,现在本地缓存,然后写入目标文件。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









