



近年来,随着无人机技术的快速发展和低空经济政策的推进,无人机在智慧城市、交通巡检、应急救援等领域的应用日益广泛。然而,无人机的智能化离不开高质量视觉数据的支持。那么,当前有哪些公开的低空视觉数据集?它们又如何分类、有何特点?未来又将如何发展?
目录
本文系统梳理近11年来低空无人机视觉数据集的发展脉络,为研究人员与应用开发者提供清晰的认知框架与实践参考。

一、空视觉数据集:为什么如此重要?
低空视觉感知是无人机获取环境信息、实现自主决策的关键技术。无论是目标检测、跟踪、语义分割,还是无人机自主导航与协同作业,都离不开大量高质量、多样化的标注数据。
公开数据集的发布,不仅推动了算法研究的标准化,也降低了研究门槛,加速了技术落地。然而,随着任务复杂化和场景多元化,单一类型的数据已难以满足需求。因此,系统梳理现有数据集,明确其特点与适用场景,显得尤为重要。
二、五大维度解析低空视觉数据集
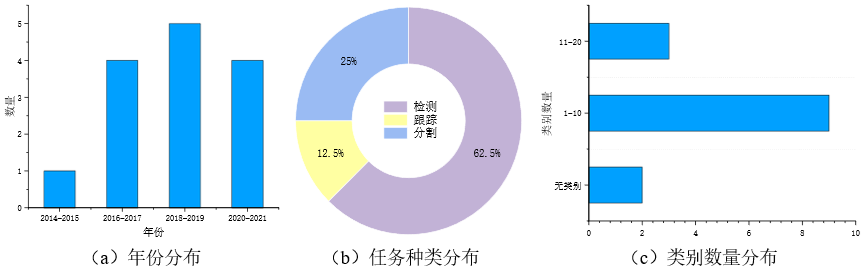
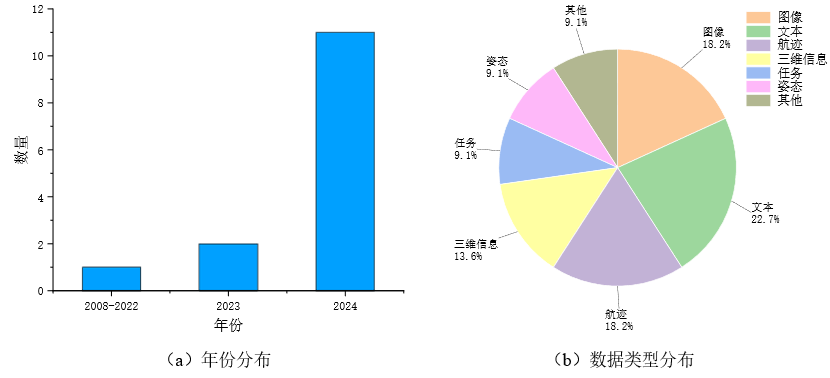
论文提出了一套基于设备类型、任务需求、模态类型、环境特性、应用需求五大方向的分类体系,全面覆盖低空视觉数据集的构建逻辑与应用场景。
-
设备类型:单机 vs 多机
-
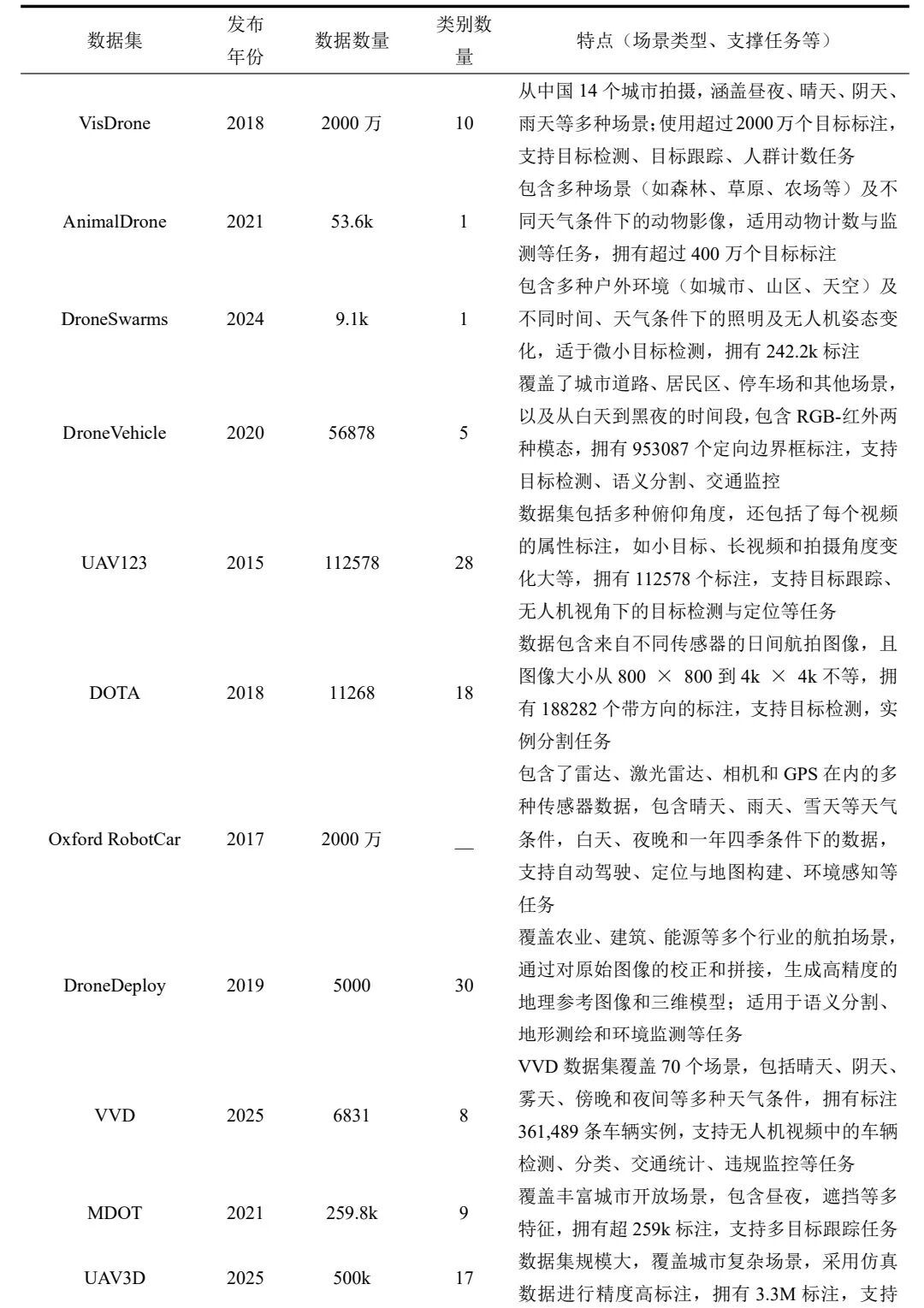
单机数据集:由单一无人机采集,视角固定,适用于特定场景下的目标检测、跟踪等任务。代表数据集包括VisDrone、UAV123、AnimalDrone等。
-
多机协同数据集:由多架无人机协同采集,覆盖多视角、跨场景,适用于立体安防、广域监测等高可靠性任务。代表数据集有MDOT、CoPerception-UAVs、MAVREC等。
展示了DOTA、SDD、DroneVehicle等数据集的典型图像,涵盖白天与夜间场景。
-
任务需求:单任务 vs 多任务
-
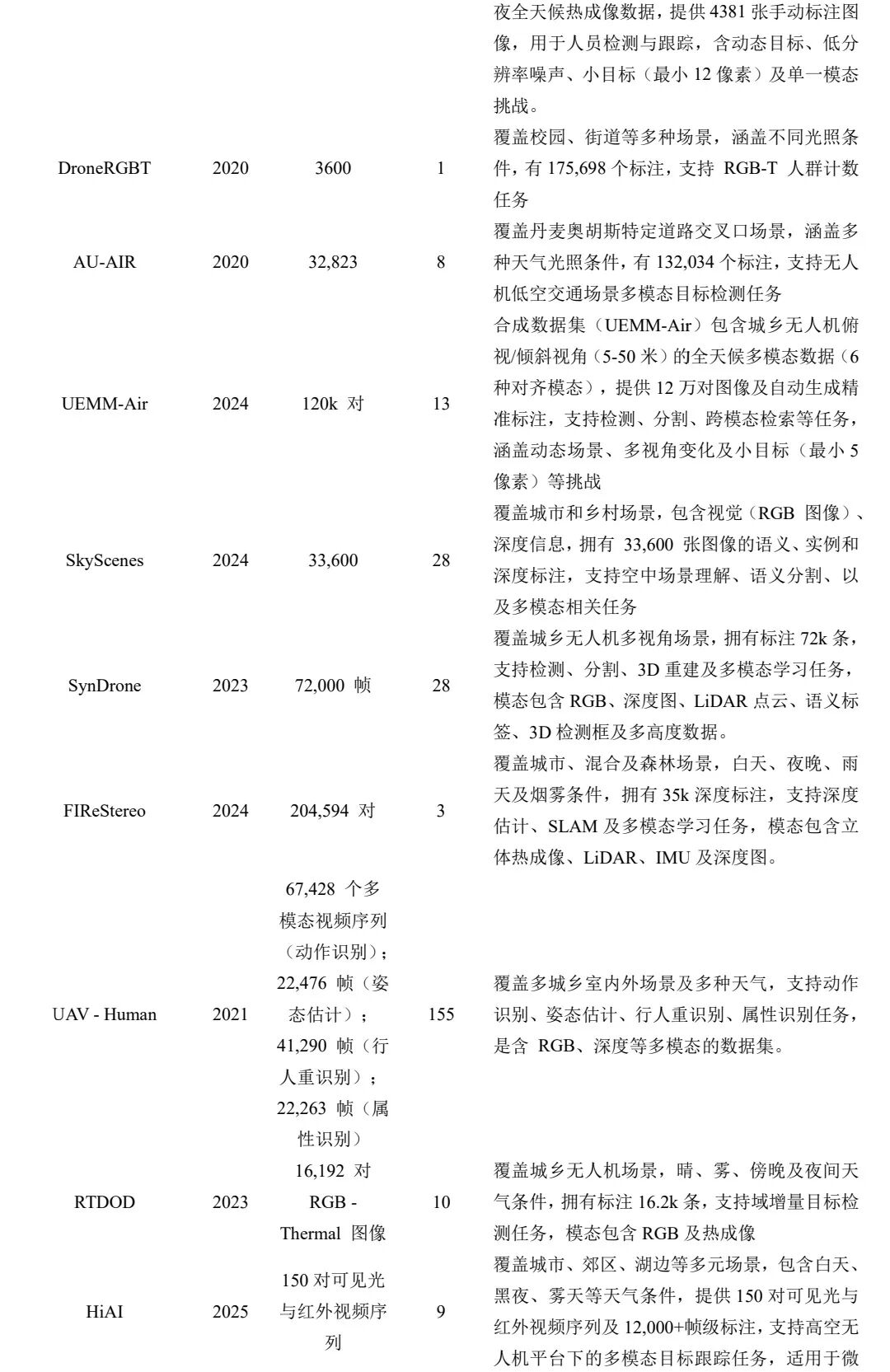
单一任务数据集:专注如车辆检测、行人跟踪等单一任务,标注粒度集中。如VEDAI、COWC等。
-
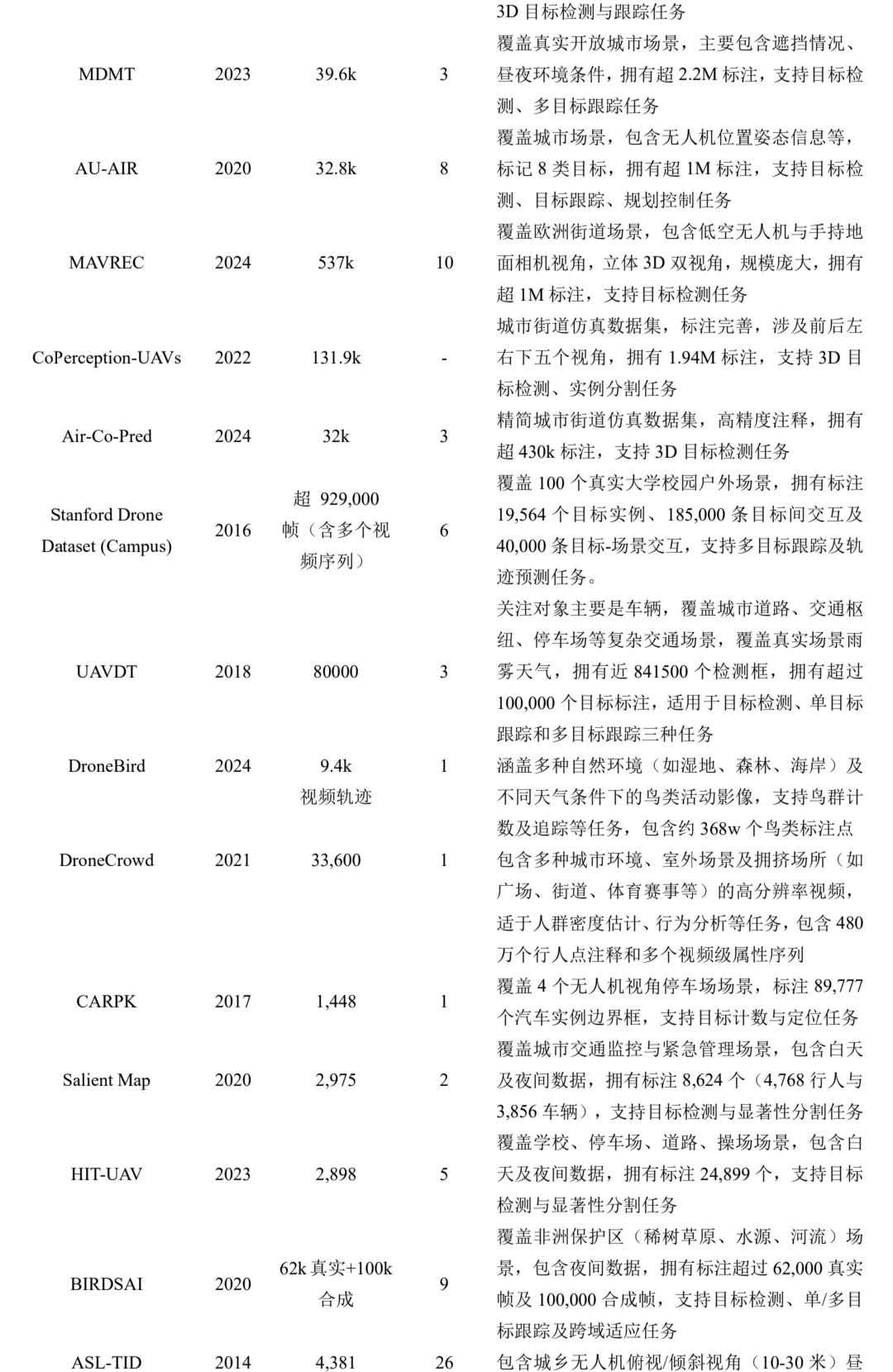
多任务数据集:支持目标检测、跟踪、计数、行为分析等多个任务,标注信息更丰富。如VisDrone、DroneCrowd、UAV-Human等。
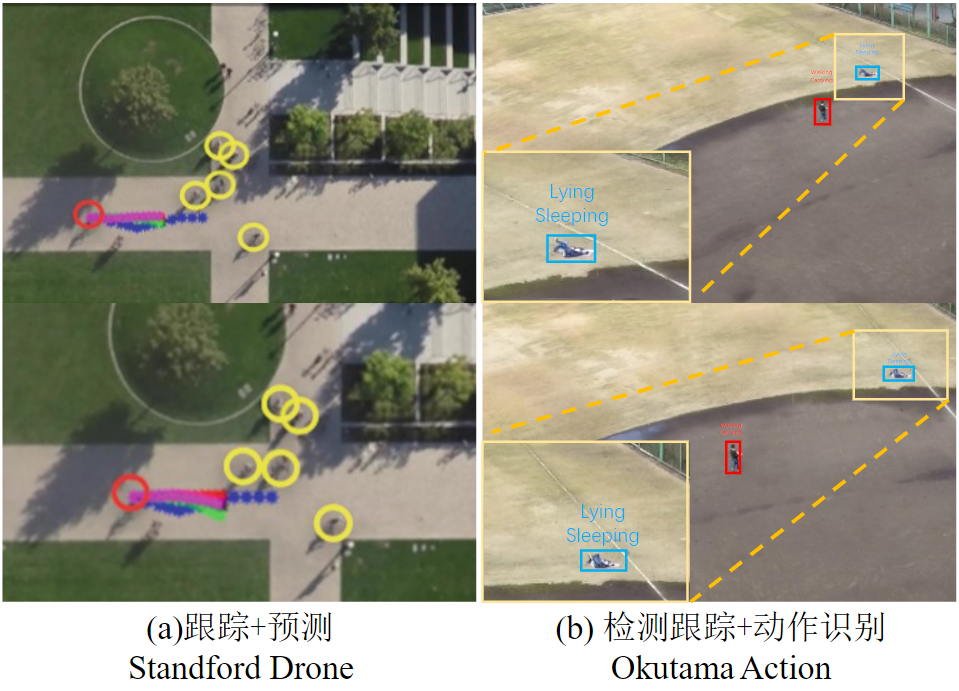
-
模态类型:单源 vs 多源
-
单源数据集:仅包含可见光或红外等单一模态数据,适用于常规场景。
-
多源数据集:融合可见光、红外、深度、LiDAR等多种传感器数据,提升在夜间、遮挡等复杂场景下的感知鲁棒性。代表数据集包括DroneVehicle、DroneRGBT、UAV-Human等。
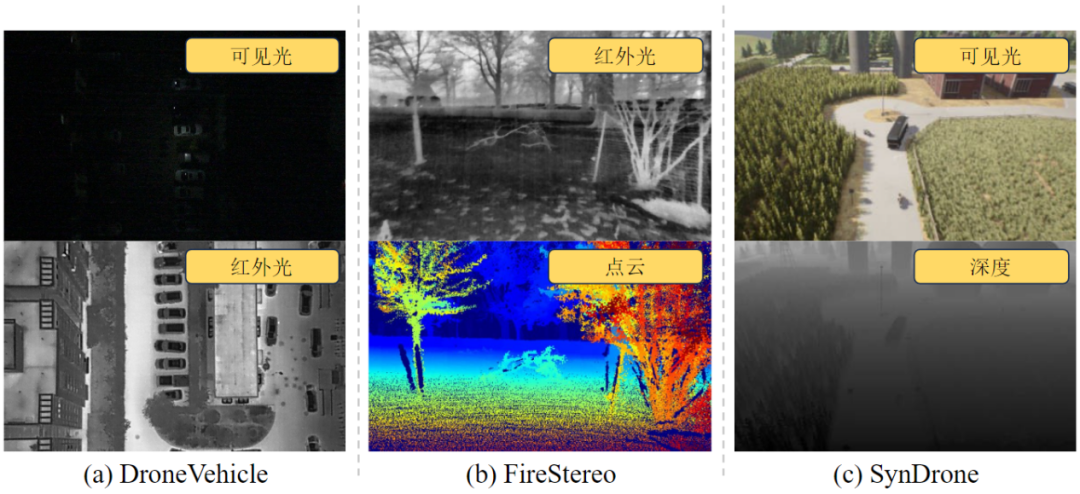
展示了DroneVehicle、FIReStereo、SynDrone等多源数据的融合示例。
-
环境特性:复杂场景下的数据挑战
复杂环境数据集涵盖雾天、雨天、运动模糊、低光照等恶劣条件,用于提升模型在真实场景中的鲁棒性。代表数据集有HazyDet、UAVDT、UAV-AWID等。
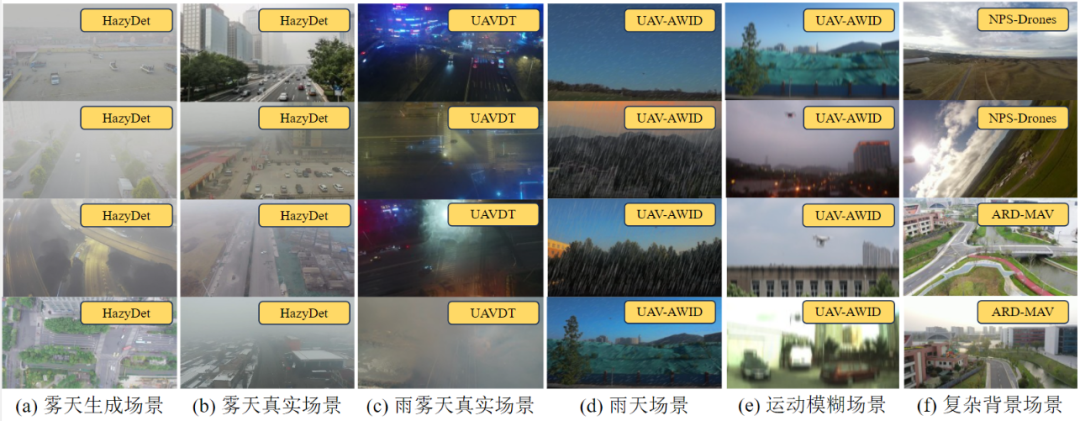
展示了雾天、雨天、运动模糊等复杂场景下的图像示例。
-
应用需求:视觉感知 vs 具身智能
-
视觉感知数据集:侧重于目标识别与环境理解。
-
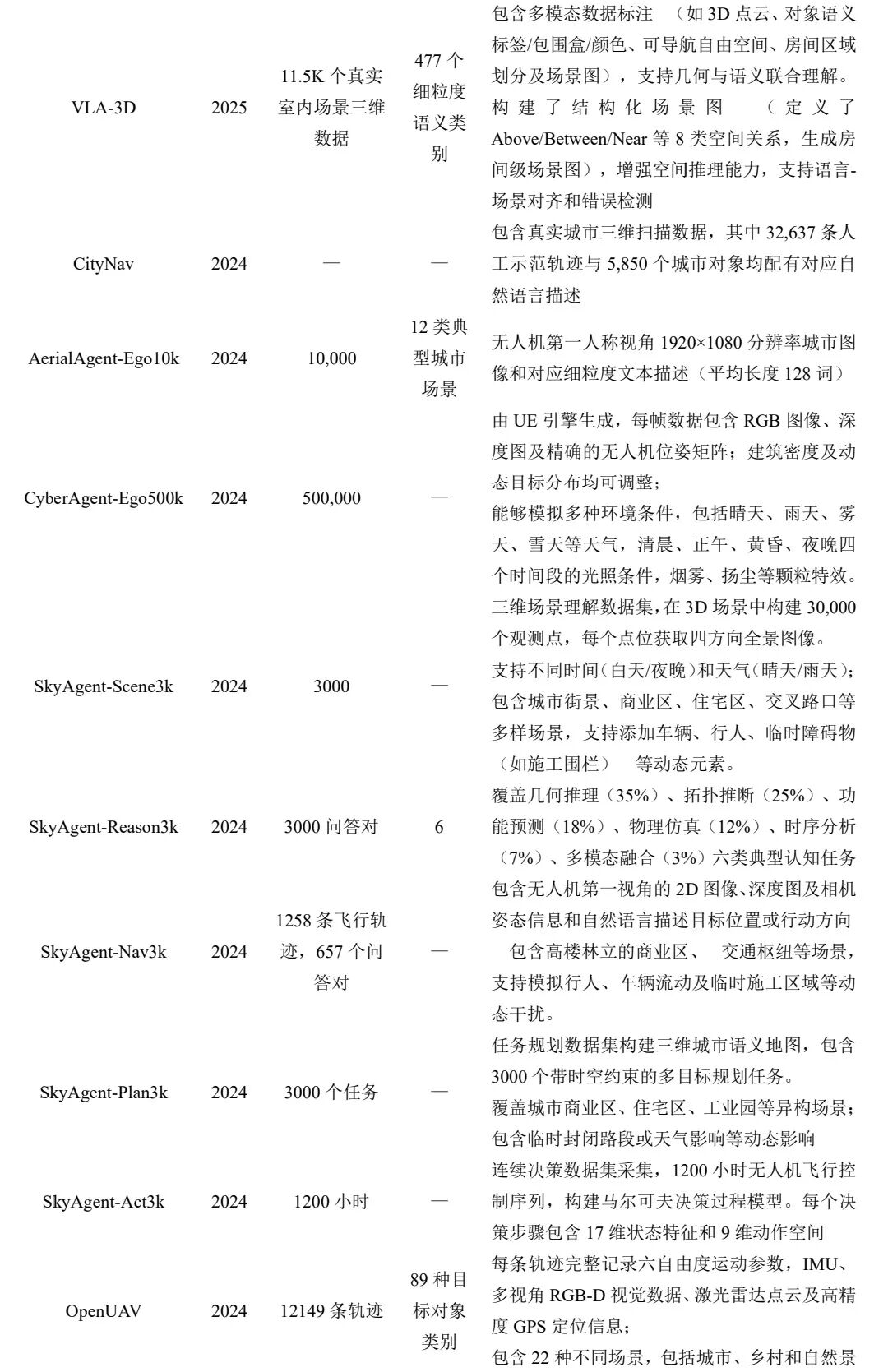
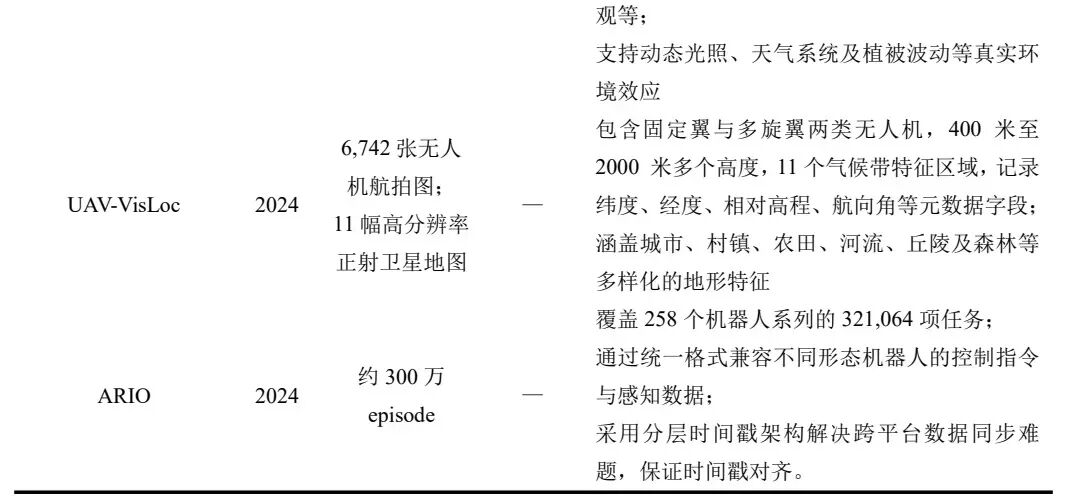
具身智能数据集:融合无人机状态、环境语义与任务指令,支持自主导航与决策。如CityNav、AeroVerse、OpenUAV等。
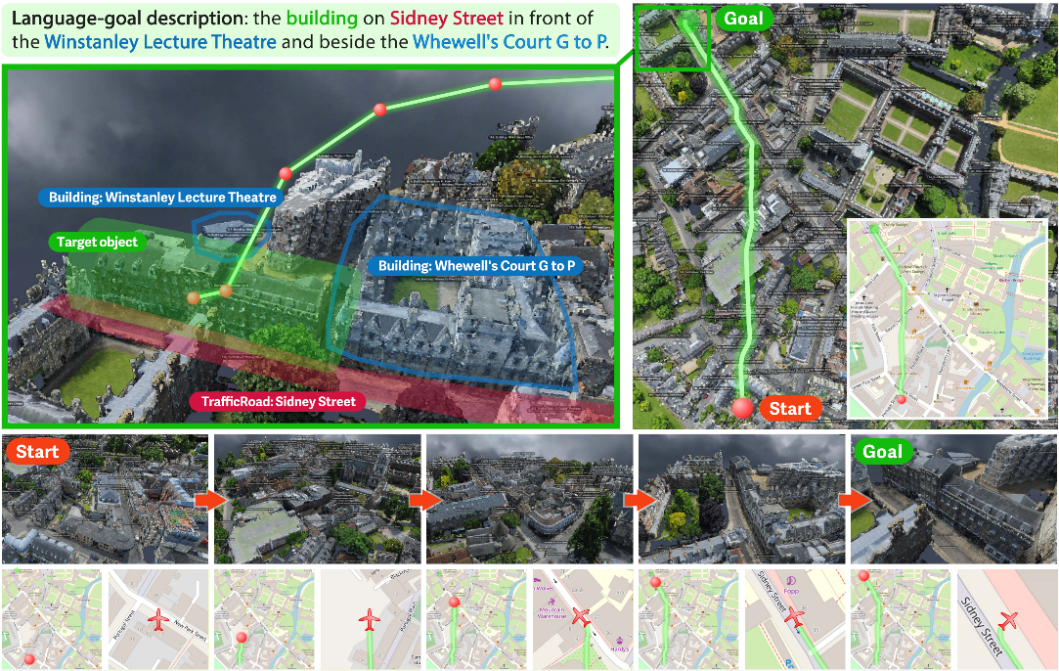
展示基于语言指令的无人机目标导航任务场景。
三、典型数据集深度解析
论文对各类别中的典型数据集进行了详细分析,涵盖数据规模、标注特点、适用任务等关键信息。
-
单机数据集代表:VisDrone
发布年份:2018
数据量:超2000万张图像
特点:覆盖14个中国城市、多种天气与光照条件,支持检测、跟踪、计数等多任务。
-
多机协同数据集代表:MDOT
发布年份:2021
特点:包含双机与三机协同数据,标注10种场景属性,支持多视角目标跟踪。
-
多任务数据集代表:DroneCrowd
发布年份:2021
特点:专注于无人机视角下的人群密度估计与行为分析,标注480万个头部位置。
-
多源数据集代表:DroneVehicle
发布年份:2020
特点:包含2.8万对RGB-红外图像,支持跨模态车辆检测,提升全天候感知能力。
-
具身智能数据集代表:AeroVerse
发布年份:2024
特点:融合视觉、语言与导航指令,支持无人机在复杂城市场景中的语义导航与任务规划。
四、现状总结与未来展望
当前进展:
数据集体系初步形成,覆盖单机、多机、多任务、多源等多个维度。
数据规模与质量显著提升,推动了感知算法性能的进步。
仍存挑战:
标注成本高、效率低:尤其在多任务、多源场景下,人工标注仍占主导。
多源数据对齐难:不同模态数据之间存在时空同步误差。
极端环境数据稀缺:雨雪、雾霾等恶劣天气数据覆盖不足。
具身智能数据割裂:环境感知与无人机状态数据缺乏深度融合。
未来发展方向:
提升数据多样性与标注效率:结合合成数据与半自动标注技术。
推动多源数据标准化:制定统一的对齐、存储与评估标准。
加强极端环境数据建设:与气象部门合作,构建量化标注体系。
深化具身智能数据融合:构建“环境-机体-任务”一体化的数据集框架。
总结
低空视觉数据集作为无人机智能化的基石,正朝着多源融合、动态适应、语义理解、自主协同的方向快速发展。未来,随着仿真技术、自动化标注与跨模态学习方法的进步,我们有望构建更智能、更鲁棒、更贴近真实世界的低空视觉数据生态系统,赋能无人机在物流、安防、农业、救援等领域的深层次应用。


















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









