 单臂路由实现VLAN间通信
单臂路由实现VLAN间通信





以太网中,通常会使用 VLAN 技术隔离二层广播域来减少广播的影响,并增强网络安
全性和网络的可管理性,但同时也严格的隔离了不同 VLAN 之间的任何二层流量,分属于
不同 VLAN 的用户不能直接互相通信。在现实中,经常会出现某些用户需要跨越 VLAN 实
现通信的情况,单臂路由技术就是解决 VLAN 间通信的一种方法。
单臂路由的原理是通过一台路由器,使 VLAN 间互通数据通过路由器进行三层转发。
如果在路由器上为每个 VLAN 分配一个单独的路由器物理接口,随着 VLAN 数量的增加,
必然需要更多的接口,而路由器能提供的接口数量比较有限,所以在路由器的一个物理接口
上通过配置子接口(即逻辑接口)的方式来实现以一当多的功能,将是一种非常好的方式,
路由器同一物理接口的不同的子接口作为不同 VLAN 的缺省网关,当不同 VLAN 间的用户
主机需要通信时,只需将数据包发送给网关,网关处理后再发送至目的主机所在 VLAN,从
而实现 VLAN 间通信。由于从拓扑结构图上看,在交换机与路由器之间,数据仅通过一条
物理链路传输,故形象的称之为“单臂路由”。

虽然目前已经创建了不同的子接口,并配置了相关 IP 地址,但是仍然无法通信。是由
于处于不同VLAN下,不同网段的PC间要实现互相通信,数据包必须通过路由器进行中转。
由 S1 发送到 R1 的数据都加上了 VLAN 标签,而路由器作为三层设备,默认无法处理带了
VLAN 标签的数据包。因此需要在路由器上的子接口下配置对应 VLAN 的封装,使路由器
能够识别和处理 VLAN 标签,包括剥离和封装 VLAN 标签。
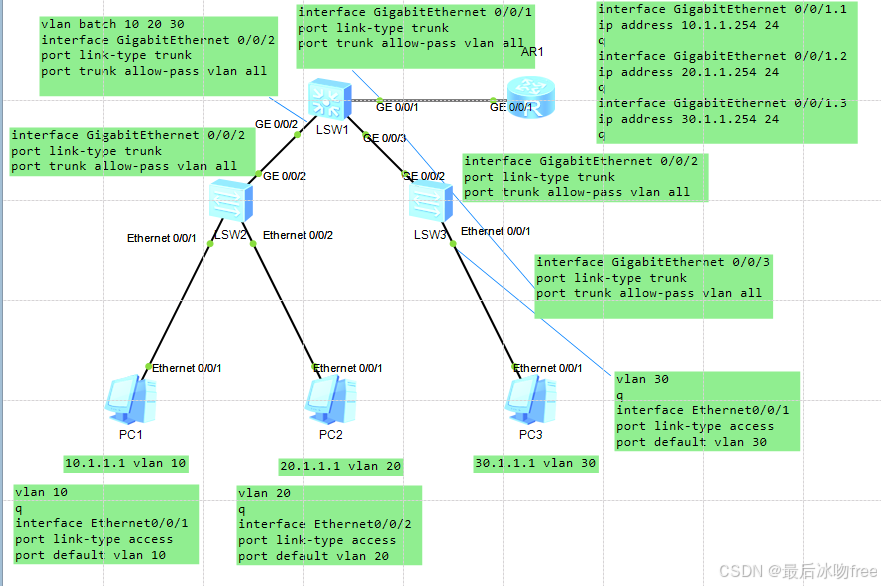
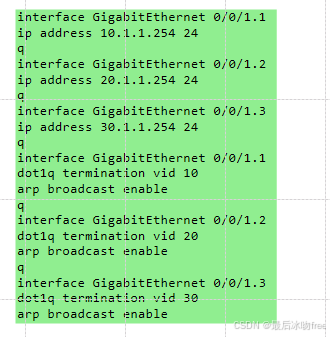
在 R1 的子接口 GE 0/0/1.1 上封装 VLAN 10,在子接口 GE 0/0/1.2 上封装 VLAN 20,在
子接口 GE 0/0/1.3 上封装 VLAN 30。并开启子接口的 ARP 广播功能。
使用 dot1q termination vid 命令配置子接口对一层 tag 报文的终结功能。即配置该命令
后,路由器子接口在接收带有 VLAN tag 的报文时,将剥掉 tag 进行三层转发,在发送报文
时,会将与该子接口对应 VLAN 的 VLAN tag 添加到报文中。
dot1q termination vid vlan_id
两台 PC 由于处于不同的网络中,这时 PC-1 会将数据包发往自己的网关,即路由器 R1
的子接口 GE 0/0/1.1 的地址 10.1.1.254。
数据包到达路由器 R1 后,由于路由器的子接口 GE 0/0/1.1 已经配置了 VLAN 封装,当
接收到 PC-1 发送的 VLAN 10 的数据帧时,发现数据帧的 VLAN ID 跟自身 GE 0/0/1/1 接口
配置的 VLAN ID 一样,便会剥离掉数据帧的 VLAN 标签后后通过三层路由转发。
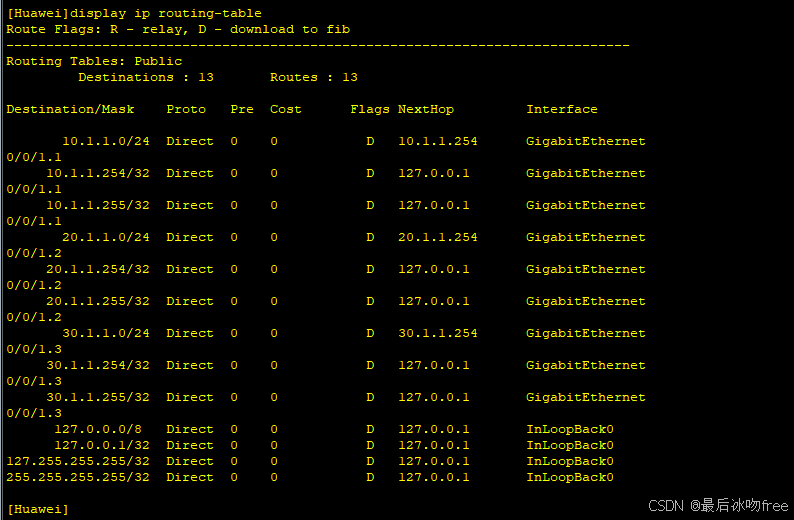
通过查找路由表后,发现数据包中的目的地址 20.1.1.1 所属的 20.1.1.0/24 网段的路由条
目,已经是路由器 R1 上的直连路由,且出接口为 GE 0/0/1.2,便将该数据包发送至 GE 0/0/1.2
接口。
当 GE 0/0/1.2 接口接收到一个没有带 VLAN 标签的数据帧时,便会加上自身接口所配
置的 VLAN ID 20 后再进行转发,然后通过交换机将数据帧顺利转发给 PC-2。
以上便是通过配置单臂路由实现不同 VLAN 间的路由的整个过程。

















 1175
1175

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









