



点击下方卡片,关注“自动驾驶之心”公众号
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
论文作者 | Lin Liu等
编辑 | 自动驾驶之心
轻舟智航等团队一篇打榜NavSim v2的工作,指出了两个问题:
主流的模仿学习方法常受困于mode collapse,无法生成多样化的轨迹。
现有生成式方法难以将安全约束和物理约束直接融入生成过程,需额外增加优化阶段来修正输出结果。
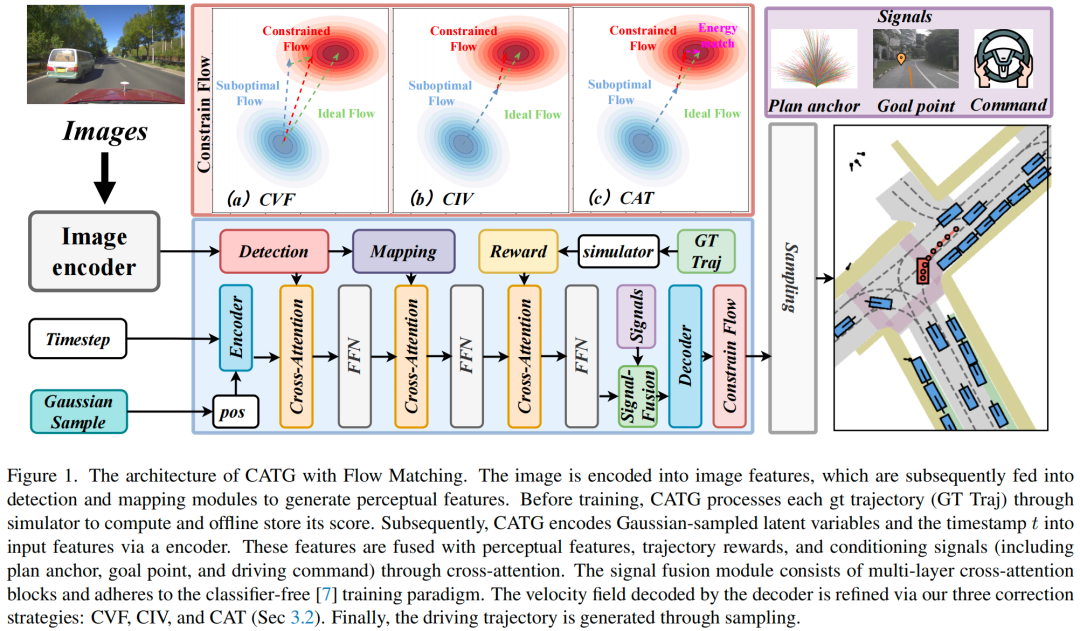
为解决这些局限,北交、轻舟、燕山大学、澳洲昆士兰大学的团队提出了CATG——一种基于Constrained flow matching的规划框架。具体而言,CATG显式建模flow matching过程,这一过程本质上可缓解mode collapse,并支持多种条件信号的灵活引导。我们的核心贡献包括:其一,在flow matching过程中创新性地引入显式约束,确保生成轨迹符合关键的安全规则和运动学准则;其二,将驾驶激进程度参数化为生成过程中的控制信号,实现对轨迹风格的精准调控。值得注意的是,在NavSim v2挑战赛中,CATG以51.31的EPDMS得分获得亚军,并荣获创新奖。
论文标题:Beyond Imitation: Constraint-Aware Trajectory Generation with Flow Matching For End-to-End Autonomous Driving
论文链接:https://arxiv.org/abs/2510.26292,也在找点子优化端到端模型的同学可以仔细看看。
一、背景回顾
端到端多模态规划已成为自动驾驶系统中的关键方法,与单轨迹预测方法相比,它在推理阶段显著提升了鲁棒性和适应性。这种能力在模糊或高度交互的驾驶场景中尤为重要——例如无保护左转、密集车流汇入或路口通行等场景,此时多条截然不同的轨迹可能均具备合理性。尽管具备这些优势,大多数当代多模态方法仍依赖模仿学习框架。这类方法从有限的专家示范轨迹中学习,由于真实轨迹的策略多样性不足,往往导致预测结果同质化,缺乏行为多样性。
为应对这些缺陷,研究人员提出了多种替代策略。一系列工作引入生成模型(如扩散过程)以捕捉更广泛的合理轨迹分布。然而,许多此类方法并未显式监督生成去噪过程,仍严重依赖行为克隆目标,因此仍易受mode collapse影响。另一类范式则更进一步,完全依赖生成模型进行轨迹规划,摒弃了模仿学习的使用。尽管这些方法受益于生成模型的特性,但也带来了新的挑战:噪声初始化的随机性可能导致预测结果方差过大,且缺乏硬约束集成机制(如避障或遵守交通规则),影响了生成轨迹的安全性和可解释性。
为解决这些局限,本文提出CATG——一种基于flow matching的新型轨迹生成框架,该框架彻底摒弃模仿学习,同时支持在生成过程中灵活注入显式约束。我们的贡献主要体现在三个方面:
(1) 新的生成框架:提出基于flow matching的多模态轨迹生成器CATG,与传统方法不同,它无需依赖模仿学习,且支持多样化、灵活的条件控制。
(2) 约束引导生成:通过渐进式机制将可行性约束和安全约束显式集成到生成过程中——利用先验感知锚点设计构建约束引导的概率流,并通过基于能量的引导进一步将轨迹导向可行区域。
(3) 奖励条件可控性:将环境奖励信号作为条件输入,在推理阶段实现激进驾驶风格与保守驾驶风格之间的可控权衡。
CATG在ICCV NAVSIM V2端到端驾驶挑战赛中经过了广泛评估,展现出卓越的规划精度和对分布外数据的稳健泛化能力。结合开源评分模型,CATG取得了51.31的EPDMS得分。
二、预备知识
设 表示数据空间,本文中使用的两个重要对象分别是:概率密度路径 ,它是一个时变概率密度函数,即满足 ;以及时变向量场 。
向量场 可用于构建时变微分同胚映射(称为流) 。该流作为概率路径 ,连接源分布 和目标分布 ,其通过常微分方程(ODE)定义:
我们可以用神经网络 对向量场 进行建模。设 为服从未知数据分布 的随机变量,我们仅能获取 的样本数据,而无法直接获取其密度函数本身。此外,令 为简单分布(例如标准正态分布)。给定目标概率密度路径 以及生成该路径的对应向量场,我们定义流匹配(FM)目标如下:
在CATG中,我们采用修正流(rectified flow)构建概率路径 。因此,漂移力 被设置为尽可能遵循从 指向 的线性路径方向 ,这一目标通过求解简单的最小二乘回归问题实现:
其中 是 和 的线性插值,满足:
三、方法详解
灵活的条件信号
本文采用Transfuser作为感知骨干网络。在flow matching过程中,从标准高斯分布中采样
,并将目标轨迹
归一化到
区间。CATG以
为起点、
为终点构建流,随后对
进行位置编码,并利用Unet编码器[5]将
编码为特征
。在CATG感知模块之后,系统会得到智能体查询向量
、自车查询向量
以及鸟瞰图(BEV)特征
。
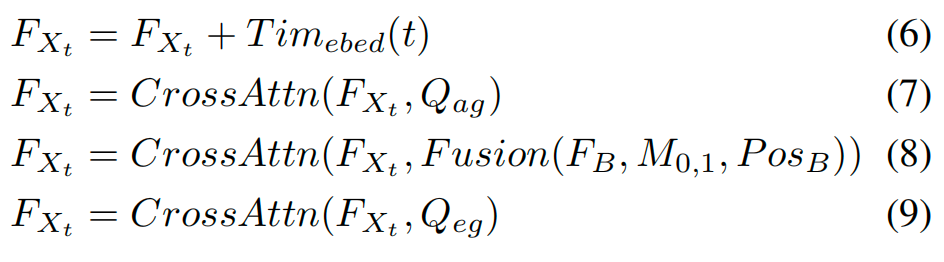
在一个独立的预处理步骤中,首先将BEV地图分割结果转换为二值化道路图 ,再将其与BEV网格位置编码 融合。最终,CATG通过多层交叉注意力机制(如图2所示),将特征 与上述所有元素( 、 、 和 )进行融合,融合过程满足:
为在推理阶段以无分类器方式灵活控制轨迹生成风格,本文引入三类不同的条件控制信号:
(1)轨迹锚点:CATG将预聚类的轨迹锚点视为驾驶模式的高层抽象。首先通过对整个训练数据集进行最远点采样(FPS),构建规模为8192的轨迹词汇表 。CATG采用无分类器引导的训练方式,将驾驶锚点作为条件信号引导轨迹生成。训练阶段,通过计算轨迹词汇表与真实轨迹(GT轨迹)间的动态时间规整(DTW)距离,选取与真实轨迹最相似的锚点作为条件信号;推理阶段,利用预训练的GTRS评分模型(基于V2-99骨干网络)筛选出可能性最高的前100个锚点,将其作为条件输入以生成多样化且合规的轨迹。
(2)目标点:训练阶段,CATG以真实轨迹的终点作为条件信号;测试阶段则相反,以从评分模型获取的锚点终点作为条件控制信号。
(3)驾驶指令:驾驶指令同样属于一类控制信号。CATG将NAVSIM中的指令类型转换为one-hot编码,用作条件信号。
约束感知轨迹生成
生成模型的一大挑战是其中间表示缺乏可解释性,难以直接对输出施加约束。具体在NAVSIM V2挑战赛中,如何让生成轨迹满足驾驶区域合规性(DAC)指标是一项重大难题。不同于Diffusion-Planner中通过车辆距离作为条件信号实现智能体间避障的约束方式,道路几何结构更为复杂。因此,下文将重点讨论如何约束轨迹以满足道路合规性,但需说明的是,本文方法同样可适配其他类型的约束。为解决这一问题,本文提出三种更直接、高效的生成约束方法。flow matching生成过程定义为:
由上述公式可知,下一时刻的生成状态 由中间变量 和速度场 决定,由此可提出一个关键假设:能否通过对这两个量施加约束来控制生成过程?
(1)约束速度场(CVF):基于道路分割结果,首先从轨迹词汇表 中选取满足DAC约束的轨迹 。随后,对于作为流起点的给定高斯样本 ,可计算出导向轨迹 的理想速度场。CATG利用该预计算的速度场 修正模型预测的可能存在偏差的速度场 ,进而提出“合成速度场”概念——在采样过程中,合成速度场由模型预测速度场 与预计算速度场 组合而成(如图1(a)所示),其中权重参数 设为-0.1。
(2)约束中间变量(CIV):由模型预测速度场生成的流往往会偏离理想状态,导致最终样本无法满足约束。该流可离散化为一系列中间变量 ;因此,若能有效约束这些中间变量,就能间接控制最终生成结果。但对每个时刻的 进行修正效率较低,为此通过修正流的起点来解决这一问题:将初始高斯随机样本替换为从轨迹词汇表 中选取的、满足DAC约束的锚点 (如图1(b)所示)——尽管该锚点在其他评估指标上可能表现不佳,但CATG可对其进行优化以提升合理性。如图2所示,以DAC合规锚点为起点的采样方式,能让模型生成更合理的轨迹。
(3)约束感知训练(CAT):不同于Diffusion-Planner仅在推理阶段引入能量项,本文在训练阶段就通过能量函数编码约束。当轨迹沿能量递增方向采样时,其满足约束的概率更高(如图1(c)所示)。具体而言,DAC约束可通过计算欧氏符号距离场来表示:轨迹越靠近道路边界,能量越低,以此对非期望偏离进行惩罚。本文采用能量匹配(Energy Matching)框架进行模型训练,分为两个阶段:第一阶段训练flow matching过程,第二阶段训练能量匹配过程。
以奖励为条件
为在推理阶段控制轨迹激进程度,CATG将自车过程(EP)得分用作条件信号。该得分通过在NAVSIM模拟器中评估NavTrain数据集中的每条真实轨迹得到。推理时,若将EP条件设为1,模型会倾向于生成更激进的驾驶行为。
四、实验结果
实验设置
本文模型的训练分为两个阶段:
第一阶段:训练flow matching过程、感知模块与地图分割模块。实验采用NavTrain数据集子集,批大小(batch size)设为64,学习率为 ,共训练90轮(epoch)。
第二阶段:遵循能量匹配框架,仅对流传匹配过程进行微调。同样使用NavTrain数据集子集,批大小为64,学习率(原文未明确给出具体数值),共训练10轮。
推理阶段,CATG通过100步采样生成100条候选轨迹,随后利用预训练的开源GTRS评分模型(基于V2-99骨干网络)对这些候选轨迹及轨迹词汇表 进行排序,选取最合理的轨迹作为最终输出。
实验结果
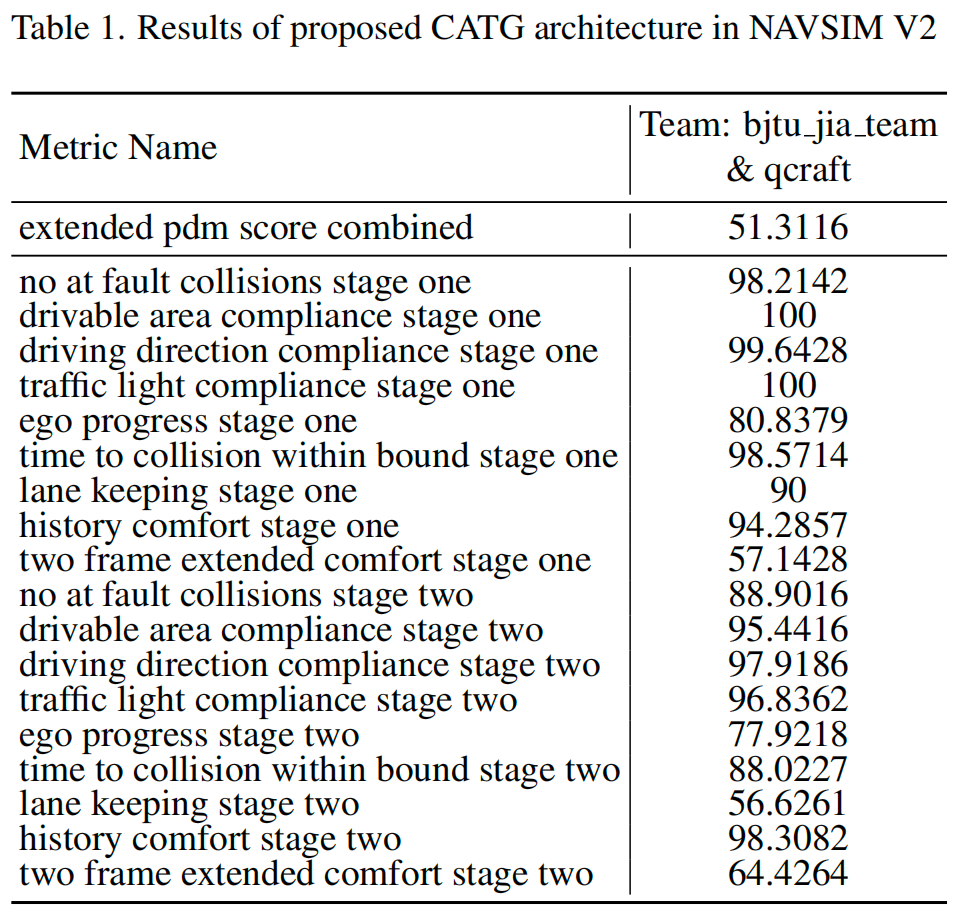
本文提出的CATG架构在NAVSIM V2中的实验结果如表1所示。
五、局限性
采用100步采样生成轨迹的计算成本仍然较高,而加速采样过程又可能导致轨迹质量下降。因此,未来研究的一个重要方向是在提升采样效率的同时,保持生成轨迹的质量。
六、结论
本文提出一种基于flow matching的端到端规划器,该方法能够融入灵活的条件信号以控制轨迹生成,此外还创新性地提出三种不同策略,在生成过程中施加显式约束。表1所示的实验结果表明,本文框架取得了51.31的EPDMS得分。
自动驾驶之心
论文辅导来啦

自驾交流群来啦!
自动驾驶之心创建了近百个技术交流群,涉及大模型、VLA、端到端、数据闭环、自动标注、BEV、Occupancy、多模态融合感知、传感器标定、3DGS、世界模型、在线地图、轨迹预测、规划控制等方向!欢迎添加小助理微信邀请进群。

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 1671
1671

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









