 理想ICCV'25分享世界模型进展
理想ICCV'25分享世界模型进展




点击下方卡片,关注“自动驾驶之心”公众号
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
理想汽在ICCV'25期间也分享了些新东西!目前还没有视频对外。
VLA团队负责人詹锟老师做了一场世界模型的presentation,名为World Model: Evolving from Data Closed-loop to Training Closed-loop。自动驾驶之心第一时间做了解读分享给大家~
首先是介绍下理想VLA司机大模型:

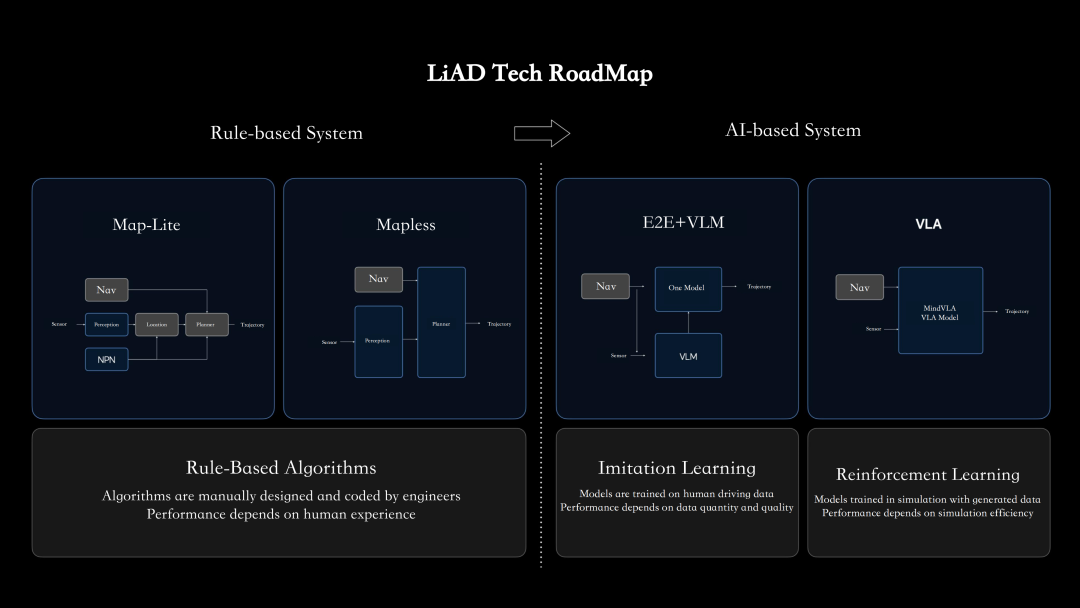
回顾了理想汽车智能驾驶的发展路线,从规则时代的轻图和无图,再到基于AI的E2E+VLM快慢双系统和VLA,这四个方案中Nav(导航)是重点突出的模块。
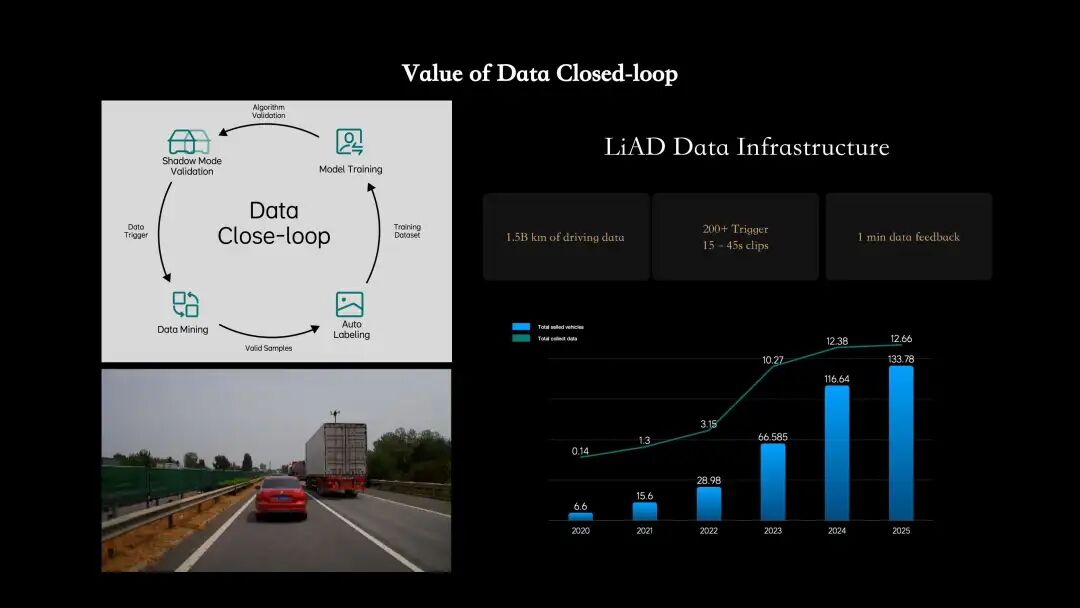
下面介绍的是数据闭环的价值。左上角这张图是一个完整的数据闭环流程:影子模式验证→经由数据触发回传到云端进行数据挖掘→有效样本进行自动标注→生成训练集训练模型→模型下发验证性能。
这个过程已经可以做到一分钟的数据回传。
目前已经有15亿公里的驾驶数据,200+的Trigger来生产15-45s的Clip数据。
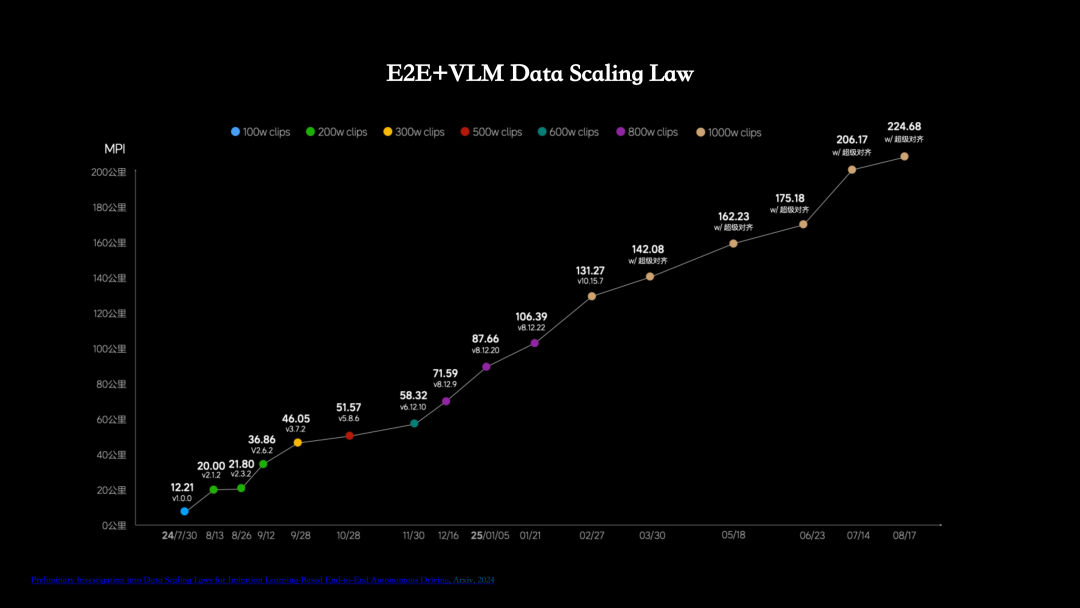
目前理想的端到端量产版本MPI已经到了220+,相比于24年7月底的版本,MPI翻了19倍左右。
数据闭环虽然有效,但仅靠数据闭环解决不了所有问题。主要还是长尾场景的收敛问题,交通管制、烟花燃放、突然的变道等等。

所以抛出来一个观点:自动驾驶进入下半场

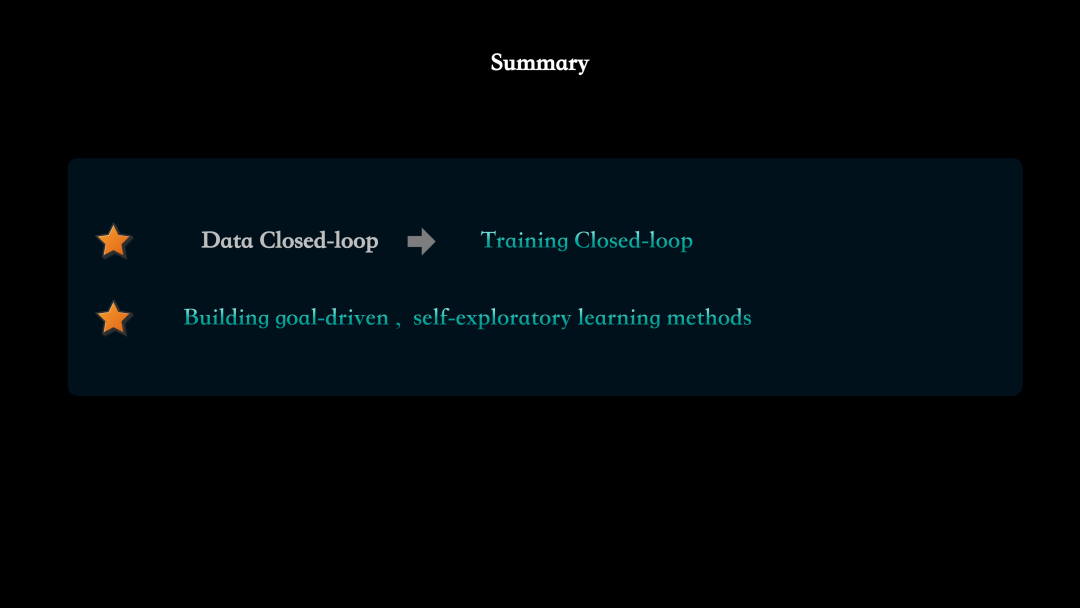
自动驾驶的下半场换个新玩法:从数据闭环到训练闭环。
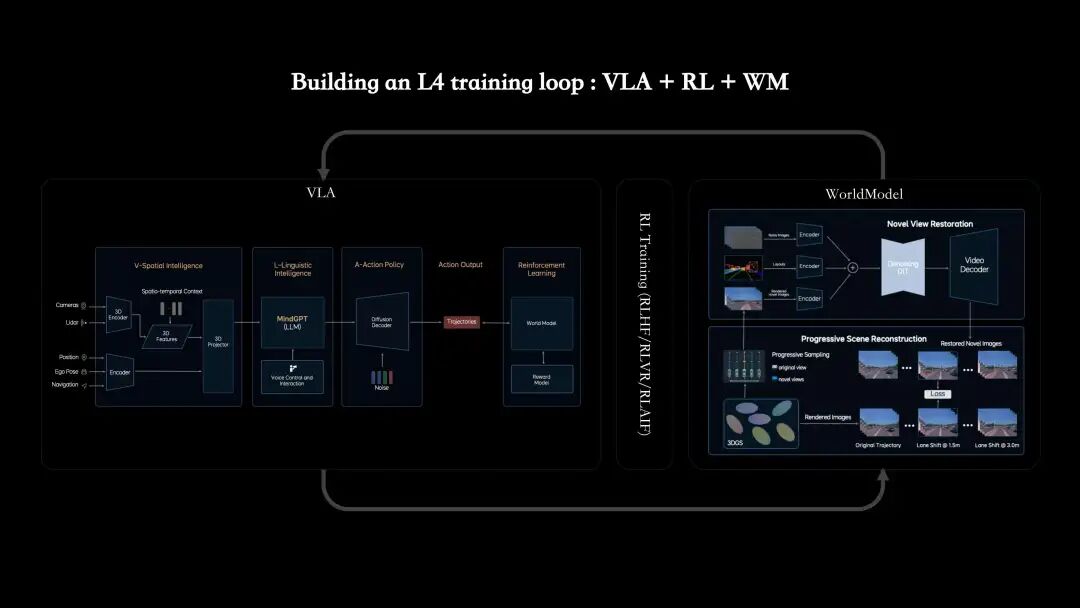
L4的训练循环的核心是:VLA+RL+WM。
轨迹由VLA的Diffusion和基于世界模型的强化学习共同优化;
强化学习不仅仅是RLHF,还有RLVR和RLAIF
右侧的世界模型主要指场景重建和新视角复原;
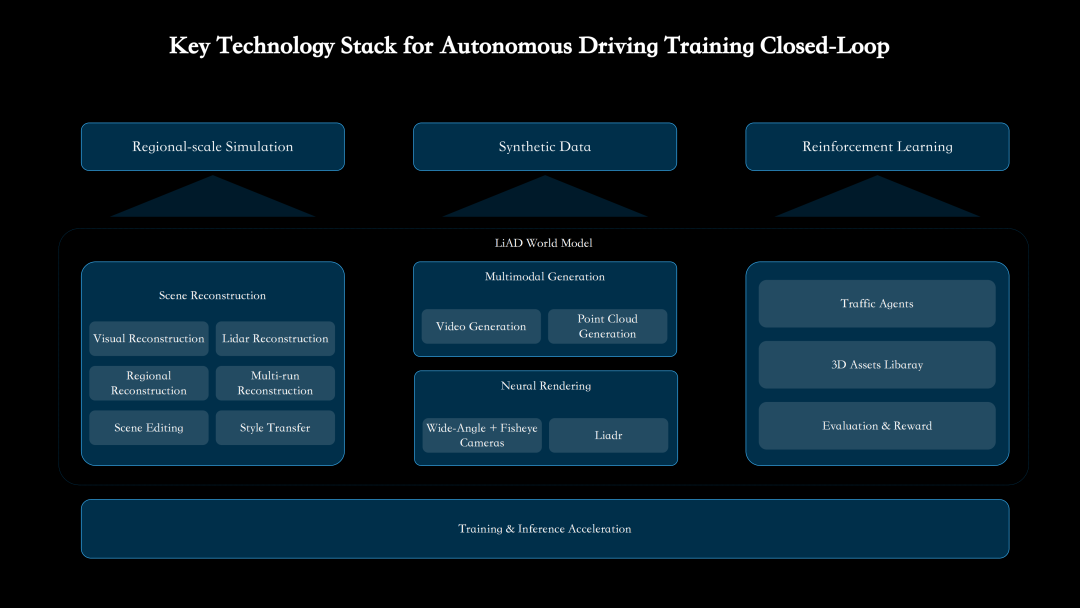
闭环自动驾驶训练关键技术栈:区域级别的仿真、合成数据和强化学习。
仿真靠场景重建:视觉/Lidar重建、区域重建、多趟重建、场景编辑和风格迁移;
合成数据靠多模态生成:视频/点云生成、神经渲染;
强化学习靠Agent、3D资产和评测&奖励
詹锟老师本人出镜的重建和生成效果图。
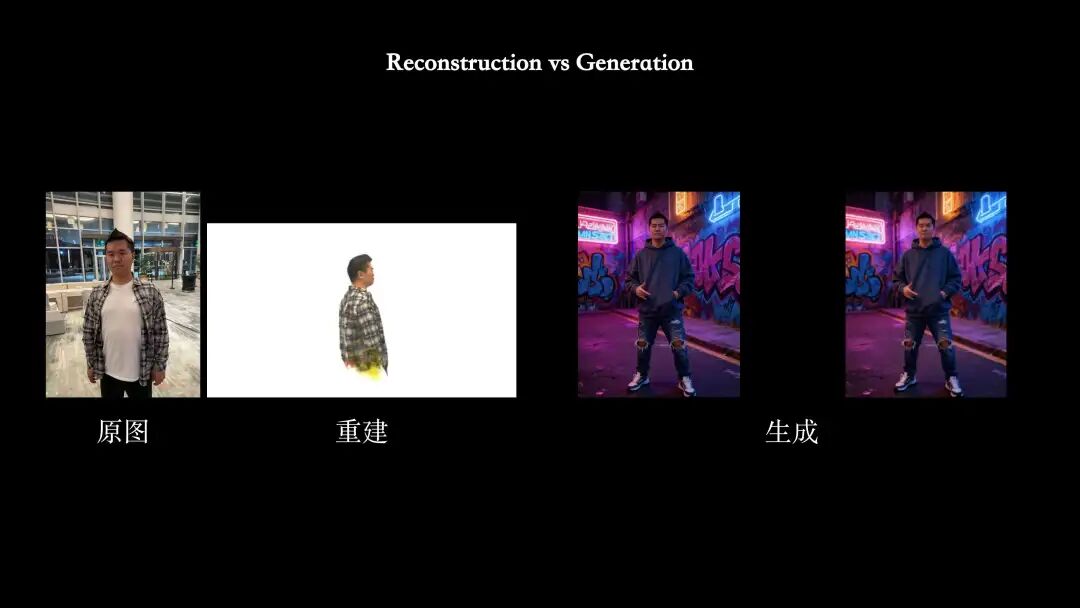
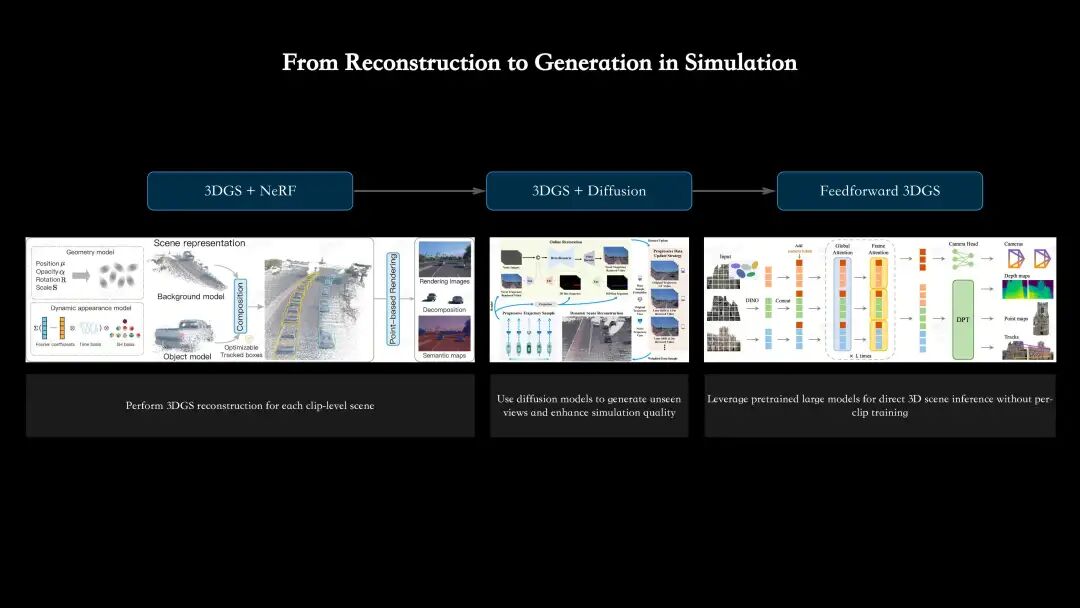
理想汽车近期从重建到生成的方案发展,确实Feedforward 3DGS今年提的很多,无需点云初始化,直接由视觉输入得到最终结果。
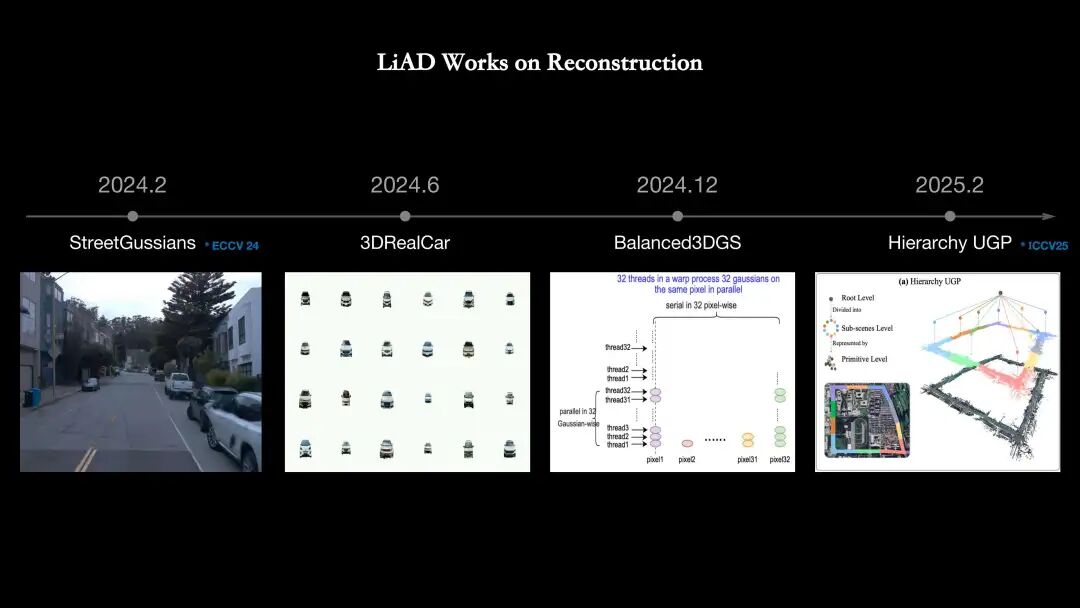
理想这两年重建方面的工作,两篇顶会。
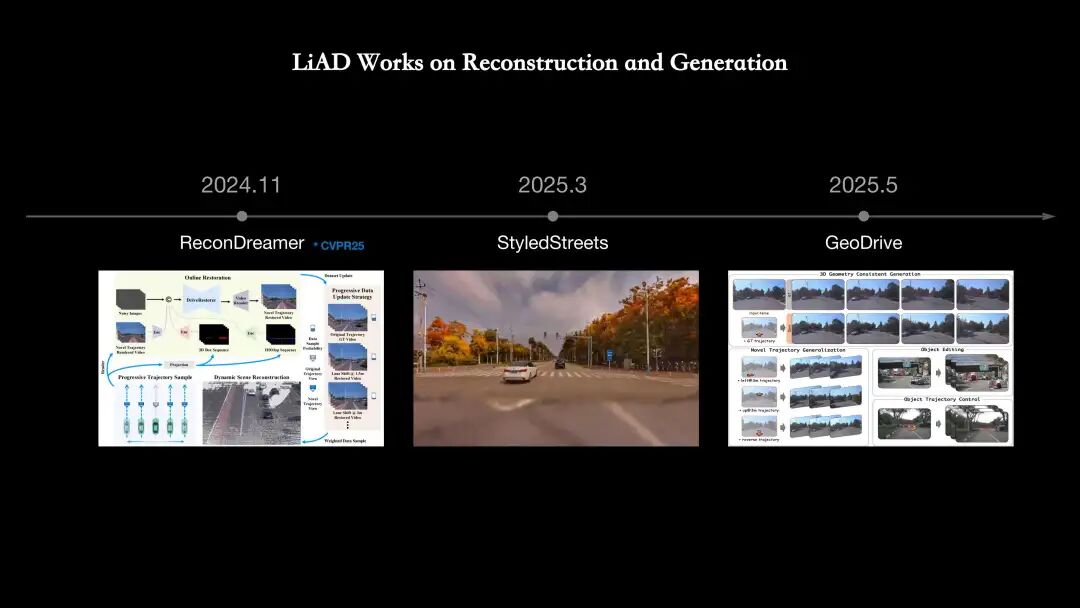
联合重建&生成方面的工作,一篇顶会。
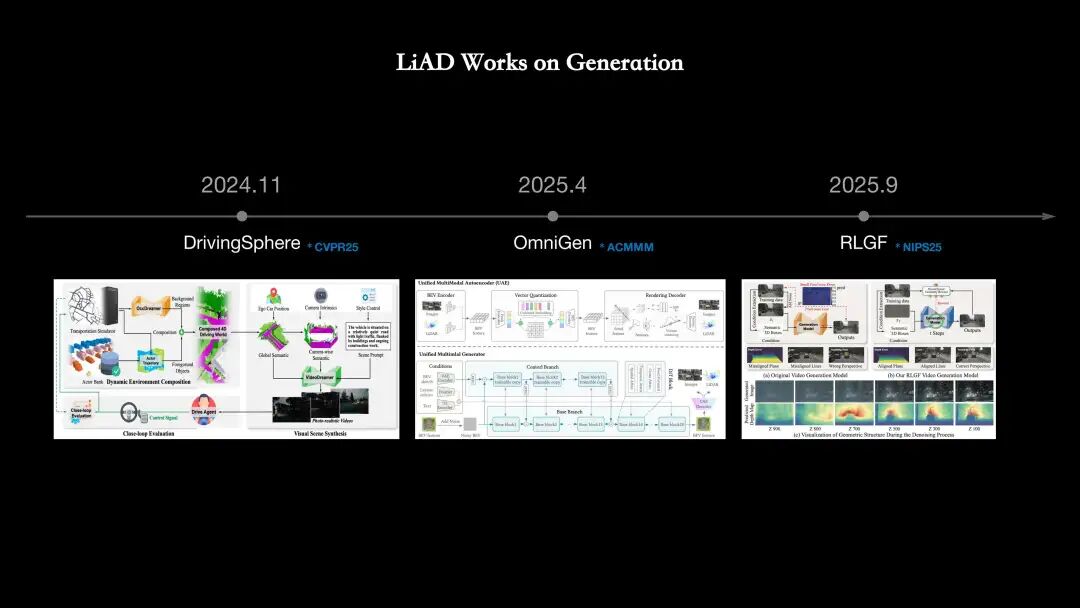
生成方面的工作,三篇顶会。
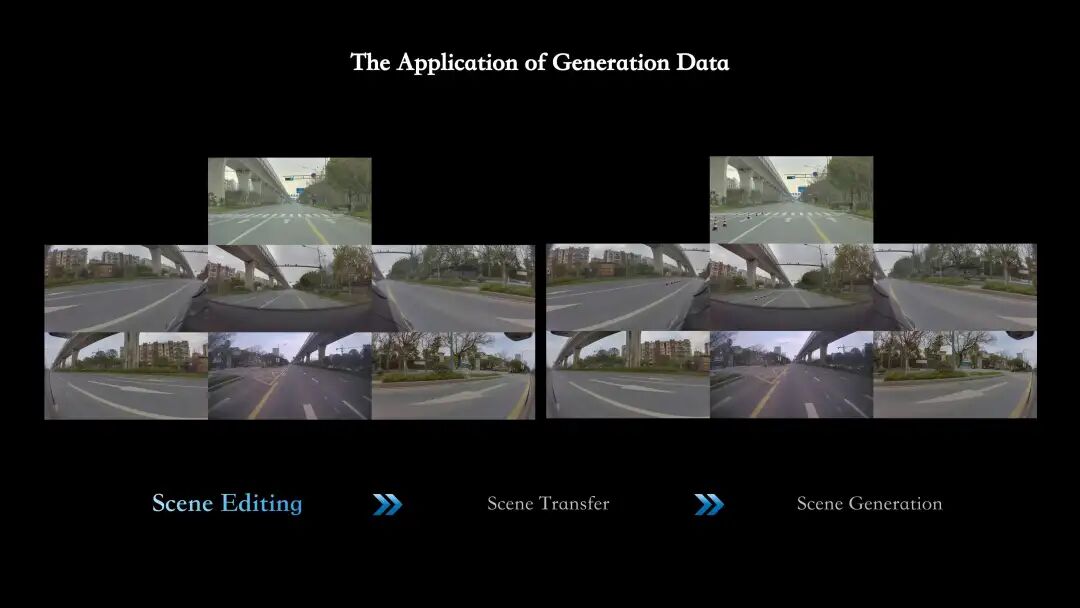
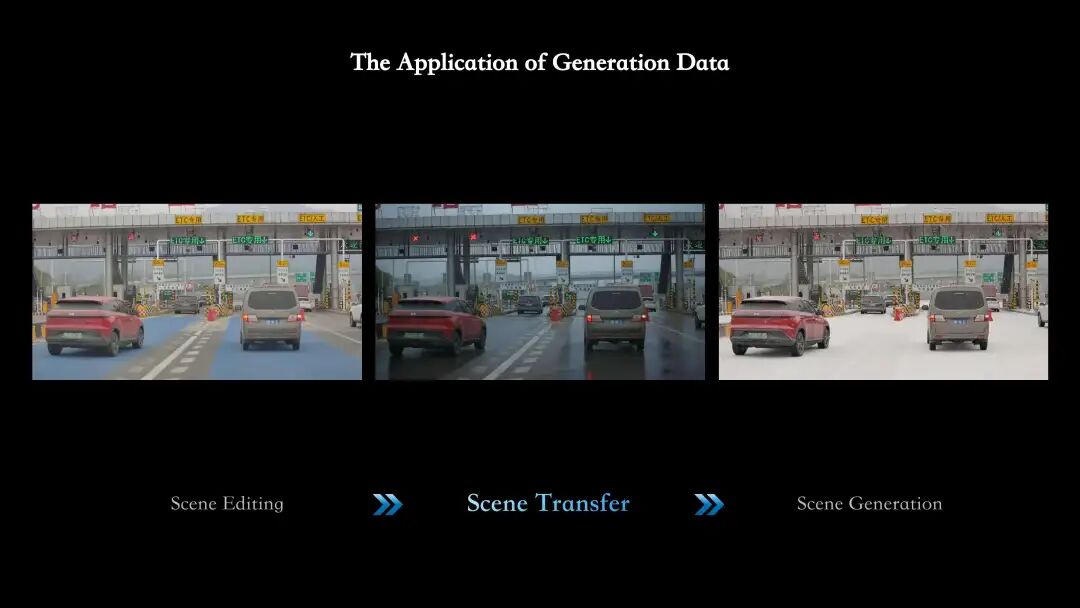
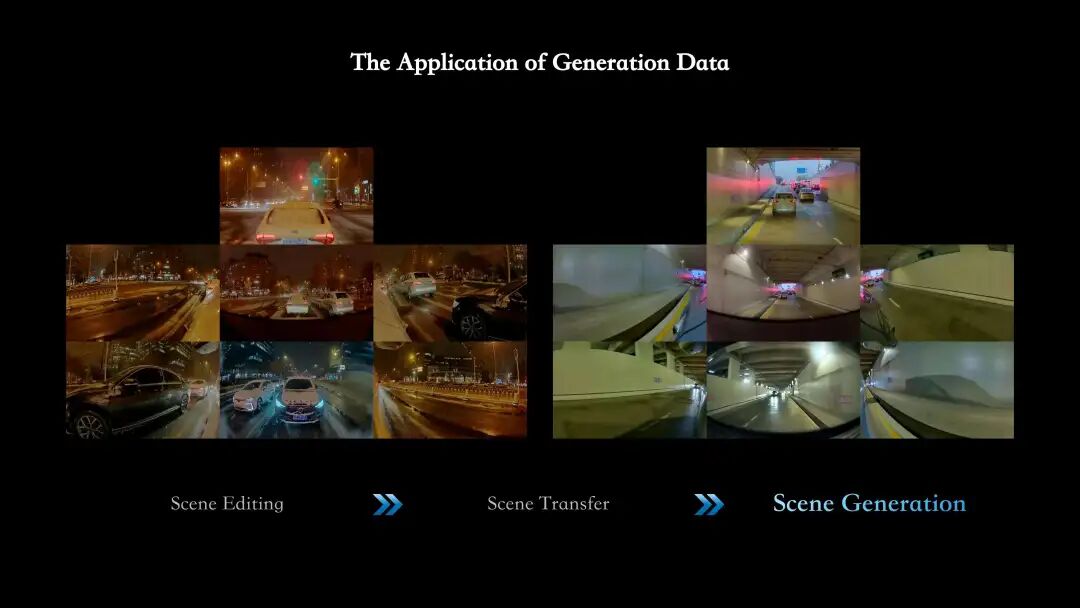
生成的应用:从场景编辑,到场景迁移再到场景生成。
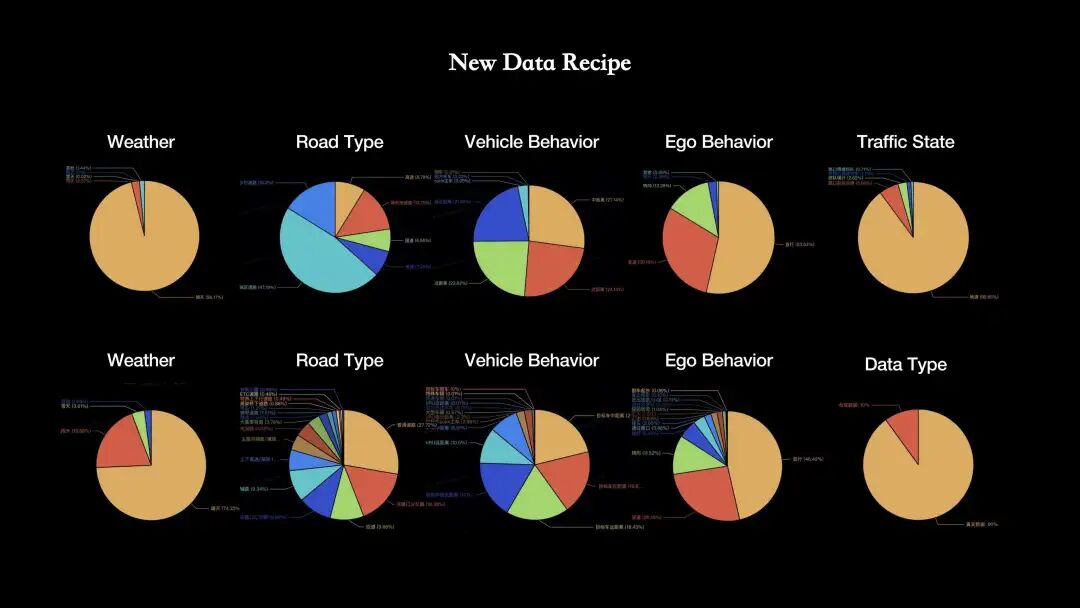
新的数据配比,看起来数据上下了不少功夫。
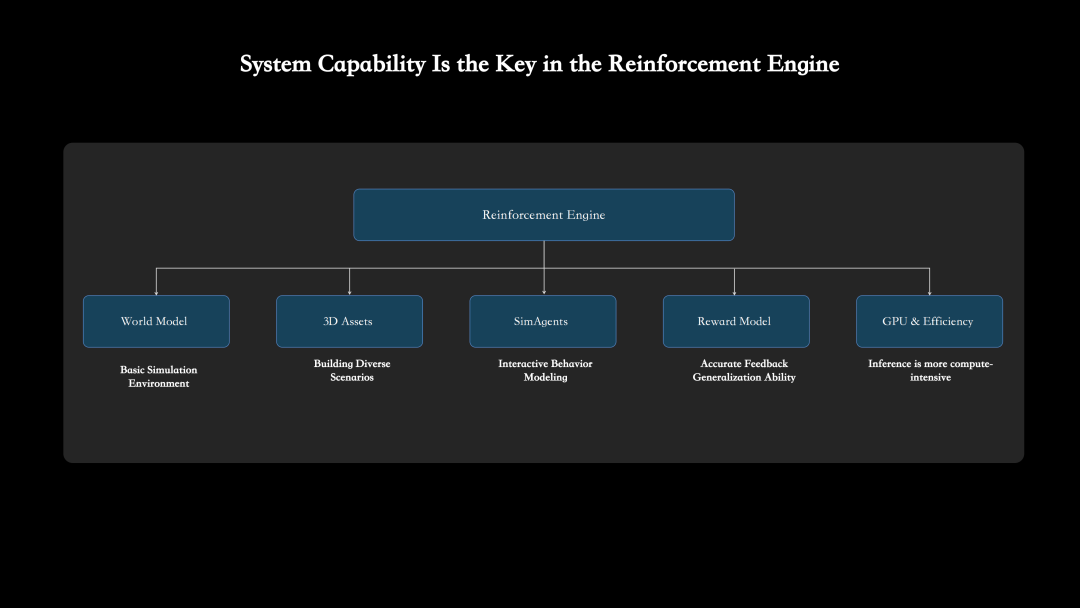
系统能力是增强引擎的关键,世界模型提供的仿真环境、3D资产构建多样化的场景、SimAgents做交互式行为建模、奖励模型准确的反馈泛化能力、GPU工程加速推理。
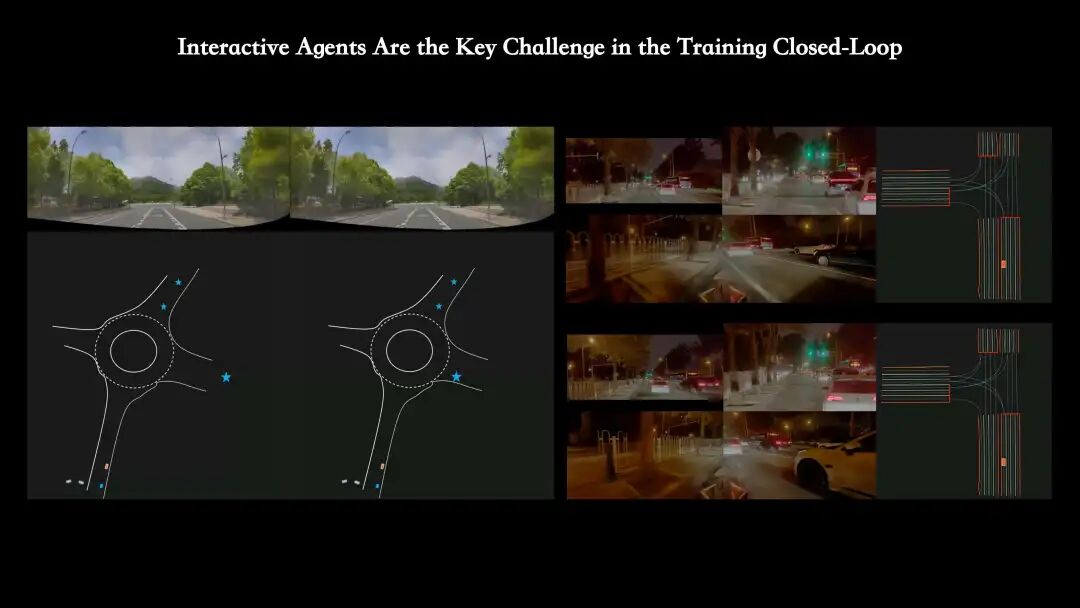
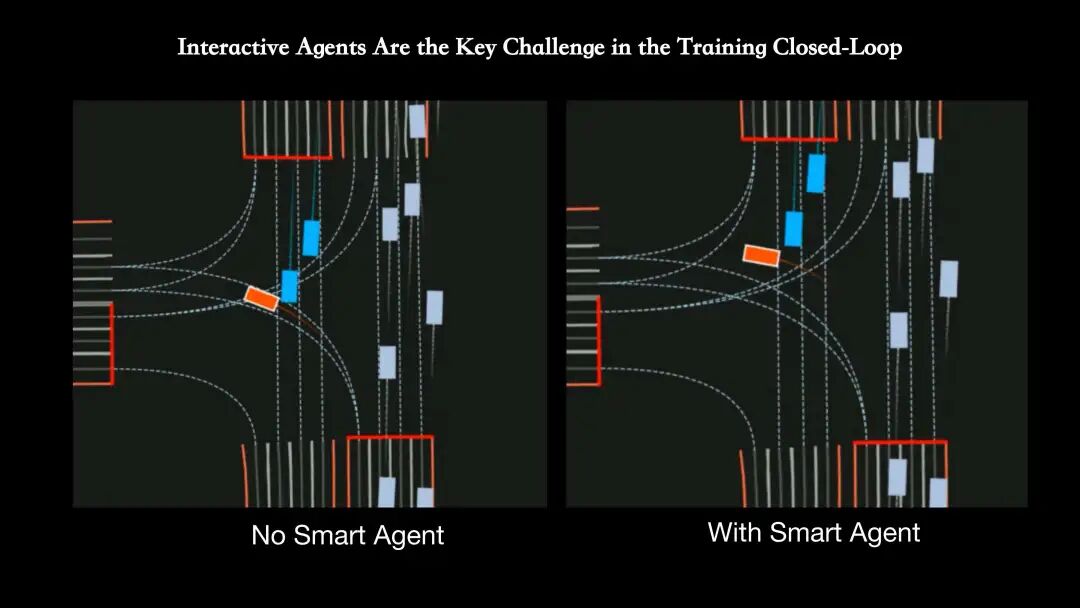
重点强调了可交互的Agent是训练闭环的关键挑战。
总结一下取得的成果和奖励。

自动驾驶之心
论文辅导来啦

自驾交流群来啦!
自动驾驶之心创建了近百个技术交流群,涉及大模型、VLA、端到端、数据闭环、自动标注、BEV、Occupancy、多模态融合感知、传感器标定、3DGS、世界模型、在线地图、轨迹预测、规划控制等方向!欢迎添加小助理微信邀请进群。

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 1991
1991

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









